 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel Cube: Diffusion-based Portrait Video Relighting Through Realistic Lighting Reproduction
Jun 05, 2026We present a diffusion-based method for relighting dynamic portrait videos with photorealism and temporal consistency. Our method is fueled by a hybrid training dataset that consists of real-captured and rendered dynamic portrait videos with diverse subject appearances, facial motions, head poses, and known lighting conditions. Specifically, we construct an LED-based lighting system for realistic lighting emulation and high-speed video relighting data acquisition. By leveraging the image priors embedded in pre-trained video diffusion models, and using per-frame high dynamic range (HDR) environment map as lighting control, we train a high-performance generative model for realistic and identity-preserving dynamic portrait video relighting. In addition to the environment map control, our model uses a synthesized background image to enable control on the camera's exposure level and color tone. Our model can produce temporally consistent relit portrait video that looks realistic and harmonious under a provided new environment and faithfully preserve the subject's expression and fine facial features, including skin tone, wrinkles, and facial hair. Our model generalizes well to unseen data, in terms of the subject appearance, motion, and lighting condition. We perform extensive experiments on relighting in-the-wild videos with various environment maps and demonstrate practical applications on portrait photography. Results show that our method achieves state-of-the-art performance in photorealism, lighting harmony, and temporal consistency.
* ACM SIGGRAPH 2026 Journal Track / ACM Transactions on Graphics, 17 pages. Project page: https://yufanzhang82.github.io/PixelCube/
ViPS: Video-informed Pose Spaces for Auto-Rigged Meshes
Apr 19, 2026Kinematic rigs provide a structured interface for articulating 3D meshes, but they lack an inherent representation of the plausible manifold of joint configurations for a given asset. Without such a pose space, stochastic sampling or manual manipulation of raw rig parameters often leads to semantic or geometric violations, such as anatomical hyperextension and non-physical self-intersections. We propose Video-informed Pose Spaces (ViPS), a feed-forward framework that discovers the latent distribution of valid articulations for auto-rigged meshes by distilling motion priors from a pretrained video diffusion model. Unlike existing methods that rely on scarce artist-authored 4D datasets, ViPS transfers generative video priors into a universal distribution over a given rig parameterization. Differentiable geometric validators applied to the skinned mesh enforce asset-specific validity without requiring manual regularizers. Our model learns a smooth, compact, and controllable pose space that supports diverse sampling, manifold projection for inverse kinematics, and temporally coherent trajectories for keyframing. Furthermore, the distilled 3D pose samples serve as precise semantic proxies for guiding video diffusion, effectively closing the loop between generative 2D priors and structured 3D kinematic control. Our evaluations show that ViPS, trained solely on video priors, matches the performance of state-of-the-art methods trained on synthetic artist-created 4D data in both plausibility and diversity. Most importantly, as a universal model, ViPS demonstrates robust zero-shot generalization to out-of-distribution species and unseen skeletal topologies.
Real-to-Sim Robot Policy Evaluation with Gaussian Splatting Simulation of Soft-Body Interactions
Nov 06, 2025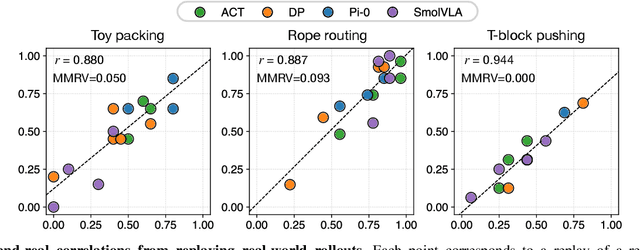
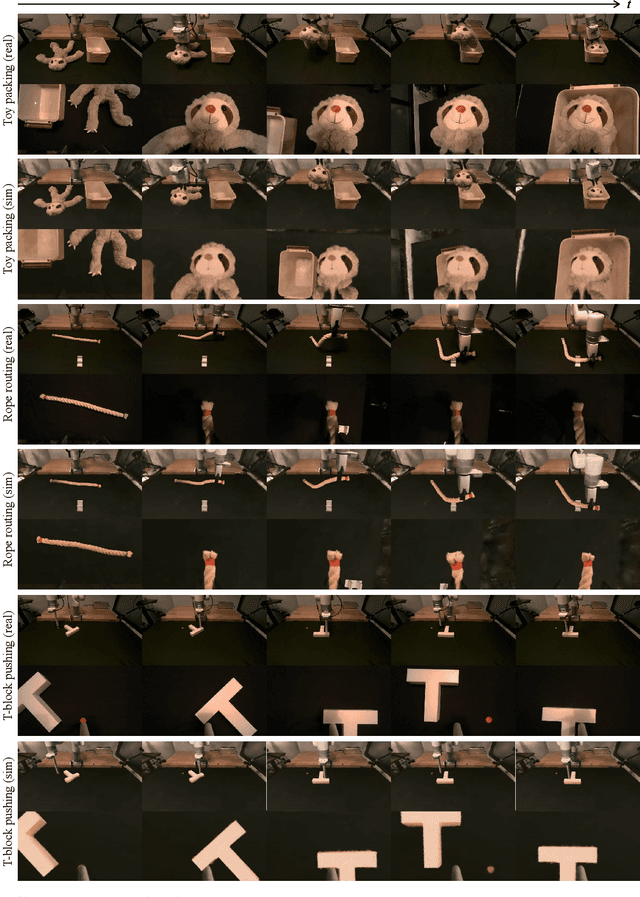
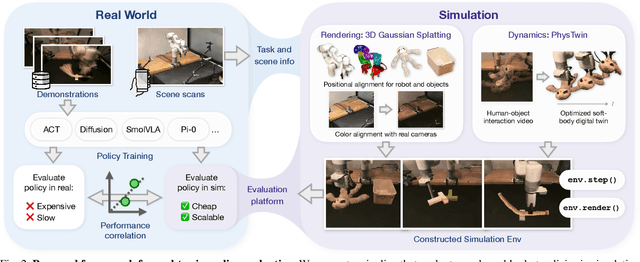
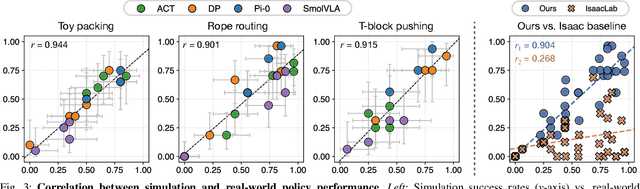
Robotic manipulation policies are advancing rapidly, but their direct evaluation in the real world remains costly, time-consuming, and difficult to reproduce, particularly for tasks involving deformable objects. Simulation provides a scalable and systematic alternative, yet existing simulators often fail to capture the coupled visual and physical complexity of soft-body interactions. We present a real-to-sim policy evaluation framework that constructs soft-body digital twins from real-world videos and renders robots, objects, and environments with photorealistic fidelity using 3D Gaussian Splatting. We validate our approach on representative deformable manipulation tasks, including plush toy packing, rope routing, and T-block pushing, demonstrating that simulated rollouts correlate strongly with real-world execution performance and reveal key behavioral patterns of learned policies. Our results suggest that combining physics-informed reconstruction with high-quality rendering enables reproducible, scalable, and accurate evaluation of robotic manipulation policies. Website: https://real2sim-eval.github.io/
Spatiotemporally Consistent Indoor Lighting Estimation with Diffusion Priors
Aug 11, 2025
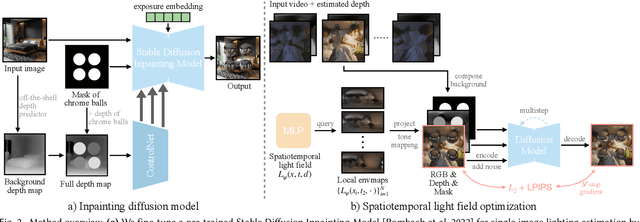


Indoor lighting estimation from a single image or video remains a challenge due to its highly ill-posed nature, especially when the lighting condition of the scene varies spatially and temporally. We propose a method that estimates from an input video a continuous light field describing the spatiotemporally varying lighting of the scene. We leverage 2D diffusion priors for optimizing such light field represented as a MLP. To enable zero-shot generalization to in-the-wild scenes, we fine-tune a pre-trained image diffusion model to predict lighting at multiple locations by jointly inpainting multiple chrome balls as light probes. We evaluate our method on indoor lighting estimation from a single image or video and show superior performance over compared baselines. Most importantly, we highlight results on spatiotemporally consistent lighting estimation from in-the-wild videos, which is rarely demonstrated in previous works.
* 11 pages. Accepted by SIGGRAPH 2025 as Conference Paper
CAT4D: Create Anything in 4D with Multi-View Video Diffusion Models
Nov 27, 2024



We present CAT4D, a method for creating 4D (dynamic 3D) scenes from monocular video. CAT4D leverages a multi-view video diffusion model trained on a diverse combination of datasets to enable novel view synthesis at any specified camera poses and timestamps. Combined with a novel sampling approach, this model can transform a single monocular video into a multi-view video, enabling robust 4D reconstruction via optimization of a deformable 3D Gaussian representation. We demonstrate competitive performance on novel view synthesis and dynamic scene reconstruction benchmarks, and highlight the creative capabilities for 4D scene generation from real or generated videos. See our project page for results and interactive demos: \url{cat-4d.github.io}.
Generative Camera Dolly: Extreme Monocular Dynamic Novel View Synthesis
May 23, 2024



Accurate reconstruction of complex dynamic scenes from just a single viewpoint continues to be a challenging task in computer vision. Current dynamic novel view synthesis methods typically require videos from many different camera viewpoints, necessitating careful recording setups, and significantly restricting their utility in the wild as well as in terms of embodied AI applications. In this paper, we propose $\textbf{GCD}$, a controllable monocular dynamic view synthesis pipeline that leverages large-scale diffusion priors to, given a video of any scene, generate a synchronous video from any other chosen perspective, conditioned on a set of relative camera pose parameters. Our model does not require depth as input, and does not explicitly model 3D scene geometry, instead performing end-to-end video-to-video translation in order to achieve its goal efficiently. Despite being trained on synthetic multi-view video data only, zero-shot real-world generalization experiments show promising results in multiple domains, including robotics, object permanence, and driving environments. We believe our framework can potentially unlock powerful applications in rich dynamic scene understanding, perception for robotics, and interactive 3D video viewing experiences for virtual reality.
PhysDreamer: Physics-Based Interaction with 3D Objects via Video Generation
Apr 19, 2024Realistic object interactions are crucial for creating immersive virtual experiences, yet synthesizing realistic 3D object dynamics in response to novel interactions remains a significant challenge. Unlike unconditional or text-conditioned dynamics generation, action-conditioned dynamics requires perceiving the physical material properties of objects and grounding the 3D motion prediction on these properties, such as object stiffness. However, estimating physical material properties is an open problem due to the lack of material ground-truth data, as measuring these properties for real objects is highly difficult. We present PhysDreamer, a physics-based approach that endows static 3D objects with interactive dynamics by leveraging the object dynamics priors learned by video generation models. By distilling these priors, PhysDreamer enables the synthesis of realistic object responses to novel interactions, such as external forces or agent manipulations. We demonstrate our approach on diverse examples of elastic objects and evaluate the realism of the synthesized interactions through a user study. PhysDreamer takes a step towards more engaging and realistic virtual experiences by enabling static 3D objects to dynamically respond to interactive stimuli in a physically plausible manner. See our project page at https://physdreamer.github.io/.
Neural Impostor: Editing Neural Radiance Fields with Explicit Shape Manipulation
Oct 09, 2023Neural Radiance Fields (NeRF) have significantly advanced the generation of highly realistic and expressive 3D scenes. However, the task of editing NeRF, particularly in terms of geometry modification, poses a significant challenge. This issue has obstructed NeRF's wider adoption across various applications. To tackle the problem of efficiently editing neural implicit fields, we introduce Neural Impostor, a hybrid representation incorporating an explicit tetrahedral mesh alongside a multigrid implicit field designated for each tetrahedron within the explicit mesh. Our framework bridges the explicit shape manipulation and the geometric editing of implicit fields by utilizing multigrid barycentric coordinate encoding, thus offering a pragmatic solution to deform, composite, and generate neural implicit fields while maintaining a complex volumetric appearance. Furthermore, we propose a comprehensive pipeline for editing neural implicit fields based on a set of explicit geometric editing operations. We show the robustness and adaptability of our system through diverse examples and experiments, including the editing of both synthetic objects and real captured data. Finally, we demonstrate the authoring process of a hybrid synthetic-captured object utilizing a variety of editing operations, underlining the transformative potential of Neural Impostor in the field of 3D content creation and manipulation.
Textureless Deformable Surface Reconstruction with Invisible Markers
Aug 25, 2023Reconstructing and tracking deformable surface with little or no texture has posed long-standing challenges. Fundamentally, the challenges stem from textureless surfaces lacking features for establishing cross-image correspondences. In this work, we present a novel type of markers to proactively enrich the object's surface features, and thereby ease the 3D surface reconstruction and correspondence tracking. Our markers are made of fluorescent dyes, visible only under the ultraviolet (UV) light and invisible under regular lighting condition. Leveraging the markers, we design a multi-camera system that captures surface deformation under the UV light and the visible light in a time multiplexing fashion. Under the UV light, markers on the object emerge to enrich its surface texture, allowing high-quality 3D shape reconstruction and tracking. Under the visible light, markers become invisible, allowing us to capture the object's original untouched appearance. We perform experiments on various challenging scenes, including hand gestures, facial expressions, waving cloth, and hand-object interaction. In all these cases, we demonstrate that our system is able to produce robust, high-quality 3D reconstruction and tracking.
Sin3DM: Learning a Diffusion Model from a Single 3D Textured Shape
May 24, 2023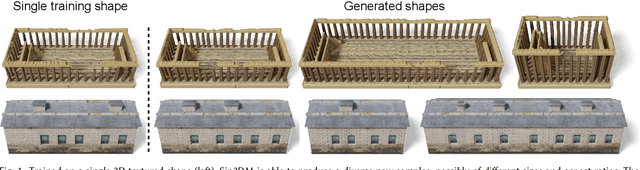
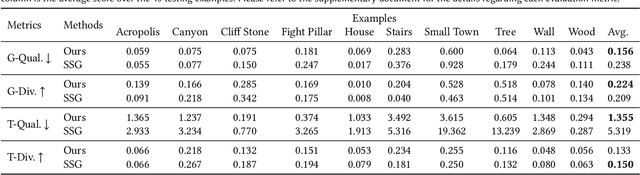
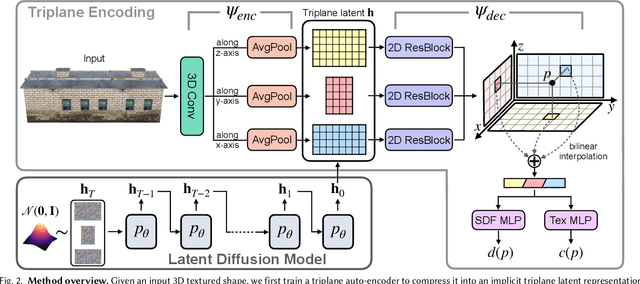
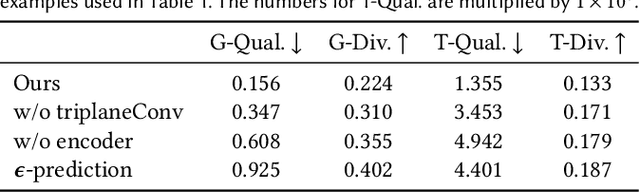
Synthesizing novel 3D models that resemble the input example has long been pursued by researchers and artists in computer graphics. In this paper, we present Sin3DM, a diffusion model that learns the internal patch distribution from a single 3D textured shape and generates high-quality variations with fine geometry and texture details. Training a diffusion model directly in 3D would induce large memory and computational cost. Therefore, we first compress the input into a lower-dimensional latent space and then train a diffusion model on it. Specifically, we encode the input 3D textured shape into triplane feature maps that represent the signed distance and texture fields of the input. The denoising network of our diffusion model has a limited receptive field to avoid overfitting, and uses triplane-aware 2D convolution blocks to improve the result quality. Aside from randomly generating new samples, our model also facilitates applications such as retargeting, outpainting and local editing. Through extensive qualitative and quantitative evaluation, we show that our model can generate 3D shapes of various types with better quality than prior methods.