 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Generators are Robot Policies
Aug 01, 2025Despite tremendous progress in dexterous manipulation, current visuomotor policies remain fundamentally limited by two challenges: they struggle to generalize under perceptual or behavioral distribution shifts, and their performance is constrained by the size of human demonstration data. In this paper, we use video generation as a proxy for robot policy learning to address both limitations simultaneously. We propose Video Policy, a modular framework that combines video and action generation that can be trained end-to-end. Our results demonstrate that learning to generate videos of robot behavior allows for the extraction of policies with minimal demonstration data, significantly improving robustness and sample efficiency. Our method shows strong generalization to unseen objects, backgrounds, and tasks, both in simulation and the real world. We further highlight that task success is closely tied to the generated video, with action-free video data providing critical benefits for generalizing to novel tasks. By leveraging large-scale video generative models, we achieve superior performance compared to traditional behavior cloning, paving the way for more scalable and data-efficient robot policy learning.
Self-Improving Autonomous Underwater Manipulation
Oct 24, 2024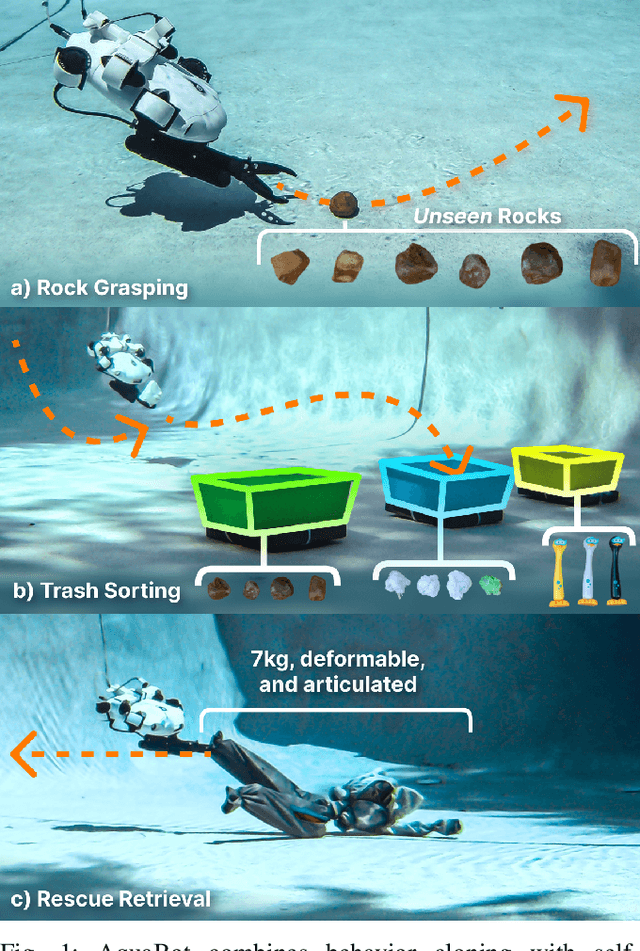
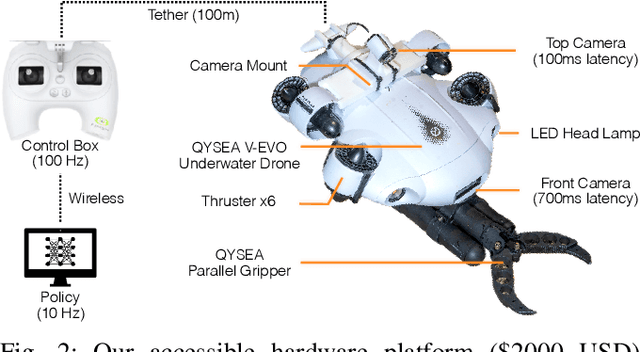
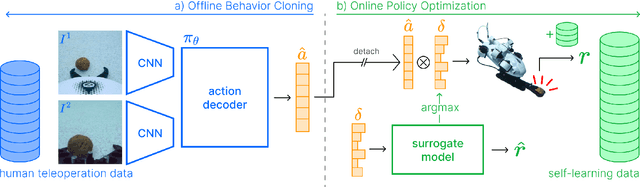
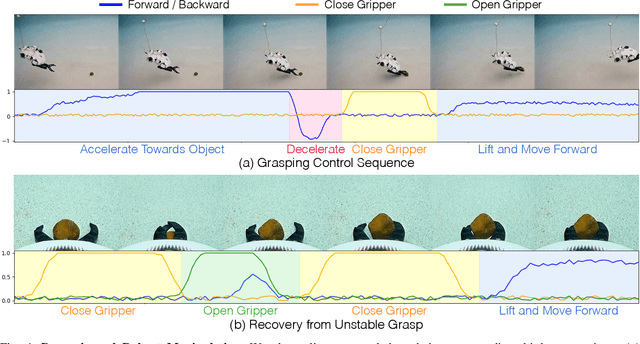
Underwater robotic manipulation faces significant challenges due to complex fluid dynamics and unstructured environments, causing most manipulation systems to rely heavily on human teleoperation. In this paper, we introduce AquaBot, a fully autonomous manipulation system that combines behavior cloning from human demonstrations with self-learning optimization to improve beyond human teleoperation performance. With extensive real-world experiments, we demonstrate AquaBot's versatility across diverse manipulation tasks, including object grasping, trash sorting, and rescue retrieval. Our real-world experiments show that AquaBot's self-optimized policy outperforms a human operator by 41% in speed. AquaBot represents a promising step towards autonomous and self-improving underwater manipulation systems. We open-source both hardware and software implementation details.
Differentiable Robot Rendering
Oct 17, 2024



Vision foundation models trained on massive amounts of visual data have shown unprecedented reasoning and planning skills in open-world settings. A key challenge in applying them to robotic tasks is the modality gap between visual data and action data. We introduce differentiable robot rendering, a method allowing the visual appearance of a robot body to be directly differentiable with respect to its control parameters. Our model integrates a kinematics-aware deformable model and Gaussians Splatting and is compatible with any robot form factors and degrees of freedom. We demonstrate its capability and usage in applications including reconstruction of robot poses from images and controlling robots through vision language models. Quantitative and qualitative results show that our differentiable rendering model provides effective gradients for robotic control directly from pixels, setting the foundation for the future applications of vision foundation models in robotics.
EraseDraw: Learning to Insert Objects by Erasing Them from Images
Aug 31, 2024



Creative processes such as painting often involve creating different components of an image one by one. Can we build a computational model to perform this task? Prior works often fail by making global changes to the image, inserting objects in unrealistic spatial locations, and generating inaccurate lighting details. We observe that while state-of-the-art models perform poorly on object insertion, they can remove objects and erase the background in natural images very well. Inverting the direction of object removal, we obtain high-quality data for learning to insert objects that are spatially, physically, and optically consistent with the surroundings. With this scalable automatic data generation pipeline, we can create a dataset for learning object insertion, which is used to train our proposed text conditioned diffusion model. Qualitative and quantitative experiments have shown that our model achieves state-of-the-art results in object insertion, particularly for in-the-wild images. We show compelling results on diverse insertion prompts and images across various domains.In addition, we automate iterative insertion by combining our insertion model with beam search guided by CLIP.
Controlling the World by Sleight of Hand
Aug 13, 2024



Humans naturally build mental models of object interactions and dynamics, allowing them to imagine how their surroundings will change if they take a certain action. While generative models today have shown impressive results on generating/editing images unconditionally or conditioned on text, current methods do not provide the ability to perform object manipulation conditioned on actions, an important tool for world modeling and action planning. Therefore, we propose to learn an action-conditional generative models by learning from unlabeled videos of human hands interacting with objects. The vast quantity of such data on the internet allows for efficient scaling which can enable high-performing action-conditional models. Given an image, and the shape/location of a desired hand interaction, CosHand, synthesizes an image of a future after the interaction has occurred. Experiments show that the resulting model can predict the effects of hand-object interactions well, with strong generalization particularly to translation, stretching, and squeezing interactions of unseen objects in unseen environments. Further, CosHand can be sampled many times to predict multiple possible effects, modeling the uncertainty of forces in the interaction/environment. Finally, method generalizes to different embodiments, including non-human hands, i.e. robot hands, suggesting that generative video models can be powerful models for robotics.
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Jun 24, 2024



A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Generative Camera Dolly: Extreme Monocular Dynamic Novel View Synthesis
May 23, 2024



Accurate reconstruction of complex dynamic scenes from just a single viewpoint continues to be a challenging task in computer vision. Current dynamic novel view synthesis methods typically require videos from many different camera viewpoints, necessitating careful recording setups, and significantly restricting their utility in the wild as well as in terms of embodied AI applications. In this paper, we propose $\textbf{GCD}$, a controllable monocular dynamic view synthesis pipeline that leverages large-scale diffusion priors to, given a video of any scene, generate a synchronous video from any other chosen perspective, conditioned on a set of relative camera pose parameters. Our model does not require depth as input, and does not explicitly model 3D scene geometry, instead performing end-to-end video-to-video translation in order to achieve its goal efficiently. Despite being trained on synthetic multi-view video data only, zero-shot real-world generalization experiments show promising results in multiple domains, including robotics, object permanence, and driving environments. We believe our framework can potentially unlock powerful applications in rich dynamic scene understanding, perception for robotics, and interactive 3D video viewing experiences for virtual reality.
PaperBot: Learning to Design Real-World Tools Using Paper
Mar 14, 2024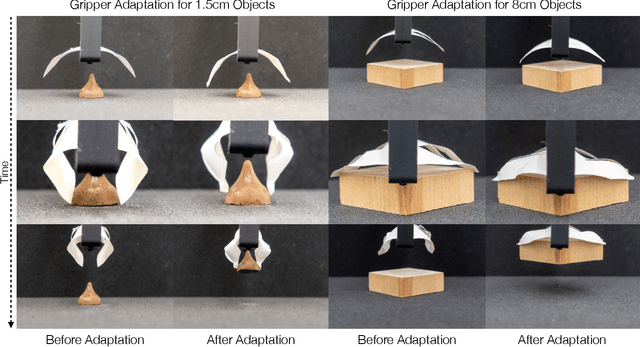

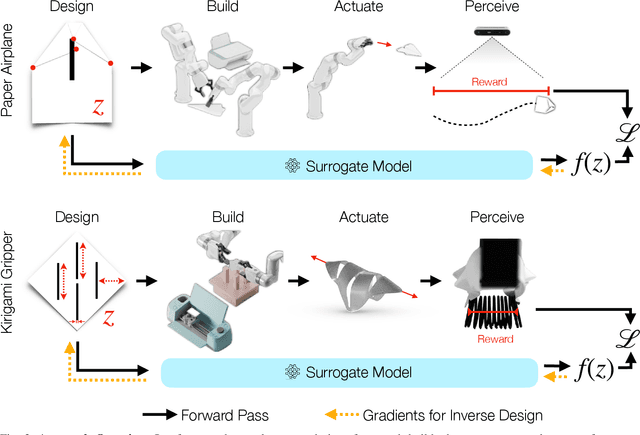
Paper is a cheap, recyclable, and clean material that is often used to make practical tools. Traditional tool design either relies on simulation or physical analysis, which is often inaccurate and time-consuming. In this paper, we propose PaperBot, an approach that directly learns to design and use a tool in the real world using paper without human intervention. We demonstrated the effectiveness and efficiency of PaperBot on two tool design tasks: 1. learning to fold and throw paper airplanes for maximum travel distance 2. learning to cut paper into grippers that exert maximum gripping force. We present a self-supervised learning framework that learns to perform a sequence of folding, cutting, and dynamic manipulation actions in order to optimize the design and use of a tool. We deploy our system to a real-world two-arm robotic system to solve challenging design tasks that involve aerodynamics (paper airplane) and friction (paper gripper) that are impossible to simulate accurately.
GES: Generalized Exponential Splatting for Efficient Radiance Field Rendering
Feb 15, 2024



Advancements in 3D Gaussian Splatting have significantly accelerated 3D reconstruction and generation. However, it may require a large number of Gaussians, which creates a substantial memory footprint. This paper introduces GES (Generalized Exponential Splatting), a novel representation that employs Generalized Exponential Function (GEF) to model 3D scenes, requiring far fewer particles to represent a scene and thus significantly outperforming Gaussian Splatting methods in efficiency with a plug-and-play replacement ability for Gaussian-based utilities. GES is validated theoretically and empirically in both principled 1D setup and realistic 3D scenes. It is shown to represent signals with sharp edges more accurately, which are typically challenging for Gaussians due to their inherent low-pass characteristics. Our empirical analysis demonstrates that GEF outperforms Gaussians in fitting natural-occurring signals (e.g. squares, triangles, and parabolic signals), thereby reducing the need for extensive splitting operations that increase the memory footprint of Gaussian Splatting. With the aid of a frequency-modulated loss, GES achieves competitive performance in novel-view synthesis benchmarks while requiring less than half the memory storage of Gaussian Splatting and increasing the rendering speed by up to 39%. The code is available on the project website https://abdullahamdi.com/ges .
pix2gestalt: Amodal Segmentation by Synthesizing Wholes
Jan 25, 2024



We introduce pix2gestalt, a framework for zero-shot amodal segmentation, which learns to estimate the shape and appearance of whole objects that are only partially visible behind occlusions. By capitalizing on large-scale diffusion models and transferring their representations to this task, we learn a conditional diffusion model for reconstructing whole objects in challenging zero-shot cases, including examples that break natural and physical priors, such as art. As training data, we use a synthetically curated dataset containing occluded objects paired with their whole counterparts. Experiments show that our approach outperforms supervised baselines on established benchmarks. Our model can furthermore be used to significantly improve the performance of existing object recognition and 3D reconstruction methods in the presence of occlusions.