 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Generators are Robot Policies
Aug 01, 2025Despite tremendous progress in dexterous manipulation, current visuomotor policies remain fundamentally limited by two challenges: they struggle to generalize under perceptual or behavioral distribution shifts, and their performance is constrained by the size of human demonstration data. In this paper, we use video generation as a proxy for robot policy learning to address both limitations simultaneously. We propose Video Policy, a modular framework that combines video and action generation that can be trained end-to-end. Our results demonstrate that learning to generate videos of robot behavior allows for the extraction of policies with minimal demonstration data, significantly improving robustness and sample efficiency. Our method shows strong generalization to unseen objects, backgrounds, and tasks, both in simulation and the real world. We further highlight that task success is closely tied to the generated video, with action-free video data providing critical benefits for generalizing to novel tasks. By leveraging large-scale video generative models, we achieve superior performance compared to traditional behavior cloning, paving the way for more scalable and data-efficient robot policy learning.
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Jun 24, 2024



A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
PaperBot: Learning to Design Real-World Tools Using Paper
Mar 14, 2024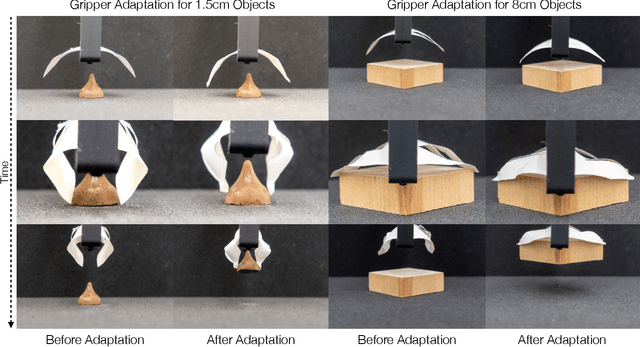

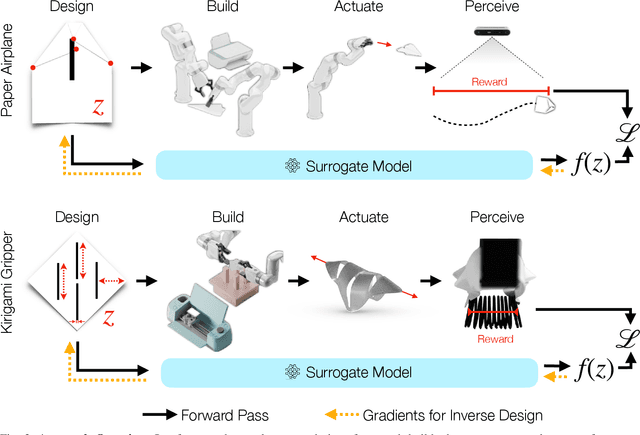
Paper is a cheap, recyclable, and clean material that is often used to make practical tools. Traditional tool design either relies on simulation or physical analysis, which is often inaccurate and time-consuming. In this paper, we propose PaperBot, an approach that directly learns to design and use a tool in the real world using paper without human intervention. We demonstrated the effectiveness and efficiency of PaperBot on two tool design tasks: 1. learning to fold and throw paper airplanes for maximum travel distance 2. learning to cut paper into grippers that exert maximum gripping force. We present a self-supervised learning framework that learns to perform a sequence of folding, cutting, and dynamic manipulation actions in order to optimize the design and use of a tool. We deploy our system to a real-world two-arm robotic system to solve challenging design tasks that involve aerodynamics (paper airplane) and friction (paper gripper) that are impossible to simulate accurately.
SHARE: Single-view Human Adversarial REconstruction
Dec 30, 2023The accuracy of 3D Human Pose and Shape reconstruction (HPS) from an image is progressively improving. Yet, no known method is robust across all image distortion. To address issues due to variations of camera poses, we introduce SHARE, a novel fine-tuning method that utilizes adversarial data augmentation to enhance the robustness of existing HPS techniques. We perform a comprehensive analysis on the impact of camera poses on HPS reconstruction outcomes. We first generated large-scale image datasets captured systematically from diverse camera perspectives. We then established a mapping between camera poses and reconstruction errors as a continuous function that characterizes the relationship between camera poses and HPS quality. Leveraging this representation, we introduce RoME (Regions of Maximal Error), a novel sampling technique for our adversarial fine-tuning method. The SHARE framework is generalizable across various single-view HPS methods and we demonstrate its performance on HMR, SPIN, PARE, CLIFF and ExPose. Our results illustrate a reduction in mean joint errors across single-view HPS techniques, for images captured from multiple camera positions without compromising their baseline performance. In many challenging cases, our method surpasses the performance of existing models, highlighting its practical significance for diverse real-world applications.
VLAP: Efficient Video-Language Alignment via Frame Prompting and Distilling for Video Question Answering
Dec 13, 2023In this work, we propose an efficient Video-Language Alignment via Frame-Prompting and Distilling (VLAP) network. Our VLAP model addresses both efficient frame sampling and effective cross-modal alignment in a unified way. In our VLAP network, we design a new learnable question-aware Frame-Prompter together with a new cross-modal distillation (QFormer-Distiller) module. Pre-trained large image-language models have shown promising results on problems such as visual question answering. However, how to efficiently and effectively sample image frames when adapting pre-trained large image-language model to video-language alignment is still the major challenge. Compared with prior work, our VLAP model demonstrates the capability of selecting key frames with critical contents, thus improving the video-language alignment accuracy while reducing the inference latency (+3.3% on NExT-QA Temporal with 3.0X speed up). Overall, our VLAP network outperforms (e.g. +4.6% on STAR Interaction and +2.2% on STAR average with 3.0X speed up, ours 2-frames out-perform SeViLA 4-frames on VLEP with 4.2X speed up) the state-of-the-art methods on the video question-answering benchmarks.
MeSa: Masked, Geometric, and Supervised Pre-training for Monocular Depth Estimation
Oct 06, 2023Pre-training has been an important ingredient in developing strong monocular depth estimation models in recent years. For instance, self-supervised learning (SSL) is particularly effective by alleviating the need for large datasets with dense ground-truth depth maps. However, despite these improvements, our study reveals that the later layers of the SOTA SSL method are actually suboptimal. By examining the layer-wise representations, we demonstrate significant changes in these later layers during fine-tuning, indicating the ineffectiveness of their pre-trained features for depth estimation. To address these limitations, we propose MeSa, a comprehensive framework that leverages the complementary strengths of masked, geometric, and supervised pre-training. Hence, MeSa benefits from not only general-purpose representations learnt via masked pre training but also specialized depth-specific features acquired via geometric and supervised pre-training. Our CKA layer-wise analysis confirms that our pre-training strategy indeed produces improved representations for the later layers, overcoming the drawbacks of the SOTA SSL method. Furthermore, via experiments on the NYUv2 and IBims-1 datasets, we demonstrate that these enhanced representations translate to performance improvements in both the in-distribution and out-of-distribution settings. We also investigate the influence of the pre-training dataset and demonstrate the efficacy of pre-training on LSUN, which yields significantly better pre-trained representations. Overall, our approach surpasses the masked pre-training SSL method by a substantial margin of 17.1% on the RMSE. Moreover, even without utilizing any recently proposed techniques, MeSa also outperforms the most recent methods and establishes a new state-of-the-art for monocular depth estimation on the challenging NYUv2 dataset.
ICAR: Image-based Complementary Auto Reasoning
Aug 17, 2023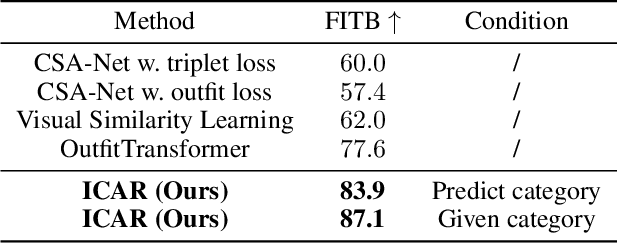
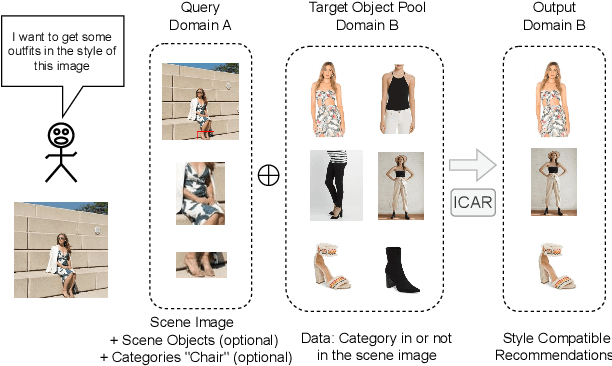
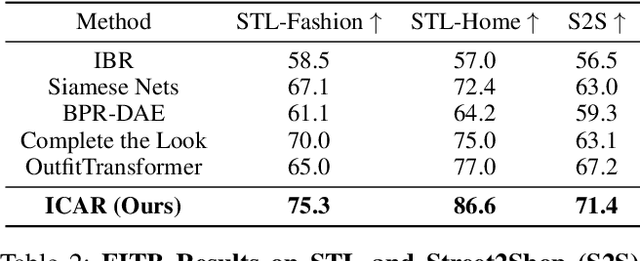
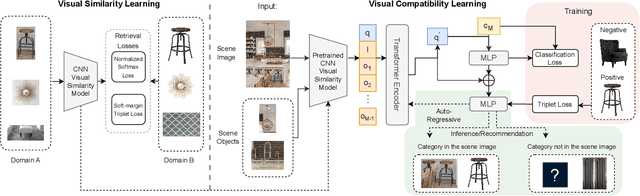
Scene-aware Complementary Item Retrieval (CIR) is a challenging task which requires to generate a set of compatible items across domains. Due to the subjectivity, it is difficult to set up a rigorous standard for both data collection and learning objectives. To address this challenging task, we propose a visual compatibility concept, composed of similarity (resembling in color, geometry, texture, and etc.) and complementarity (different items like table vs chair completing a group). Based on this notion, we propose a compatibility learning framework, a category-aware Flexible Bidirectional Transformer (FBT), for visual "scene-based set compatibility reasoning" with the cross-domain visual similarity input and auto-regressive complementary item generation. We introduce a "Flexible Bidirectional Transformer (FBT)" consisting of an encoder with flexible masking, a category prediction arm, and an auto-regressive visual embedding prediction arm. And the inputs for FBT are cross-domain visual similarity invariant embeddings, making this framework quite generalizable. Furthermore, our proposed FBT model learns the inter-object compatibility from a large set of scene images in a self-supervised way. Compared with the SOTA methods, this approach achieves up to 5.3% and 9.6% in FITB score and 22.3% and 31.8% SFID improvement on fashion and furniture, respectively.
Differentiable Simulation of Soft Multi-body Systems
May 03, 2022

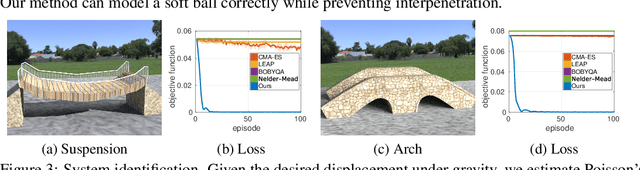
We present a method for differentiable simulation of soft articulated bodies. Our work enables the integration of differentiable physical dynamics into gradient-based pipelines. We develop a top-down matrix assembly algorithm within Projective Dynamics and derive a generalized dry friction model for soft continuum using a new matrix splitting strategy. We derive a differentiable control framework for soft articulated bodies driven by muscles, joint torques, or pneumatic tubes. The experiments demonstrate that our designs make soft body simulation more stable and realistic compared to other frameworks. Our method accelerates the solution of system identification problems by more than an order of magnitude, and enables efficient gradient-based learning of motion control with soft robots.
Efficient Differentiable Simulation of Articulated Bodies
Sep 16, 2021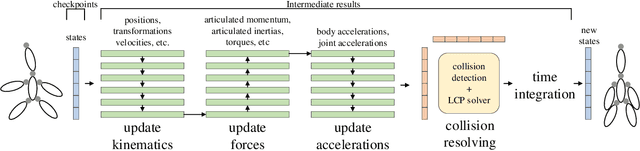
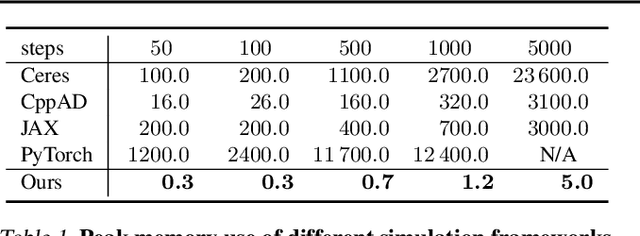
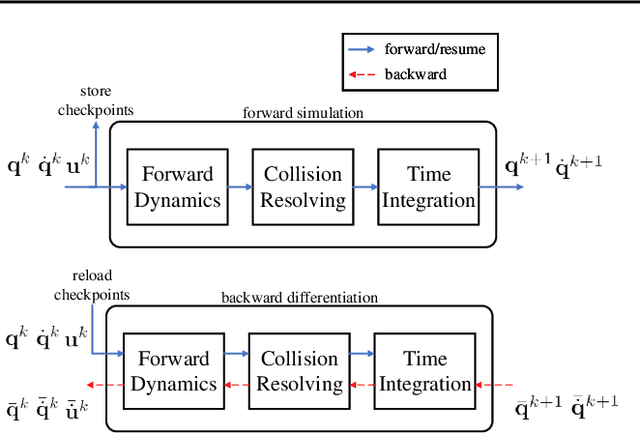
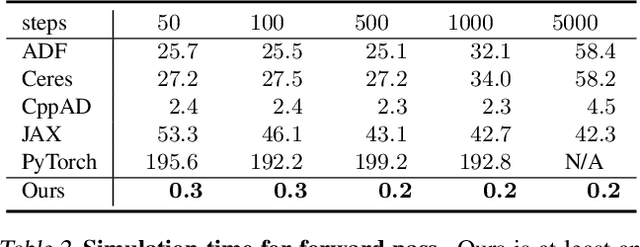
We present a method for efficient differentiable simulation of articulated bodies. This enables integration of articulated body dynamics into deep learning frameworks, and gradient-based optimization of neural networks that operate on articulated bodies. We derive the gradients of the forward dynamics using spatial algebra and the adjoint method. Our approach is an order of magnitude faster than autodiff tools. By only saving the initial states throughout the simulation process, our method reduces memory requirements by two orders of magnitude. We demonstrate the utility of efficient differentiable dynamics for articulated bodies in a variety of applications. We show that reinforcement learning with articulated systems can be accelerated using gradients provided by our method. In applications to control and inverse problems, gradient-based optimization enabled by our work accelerates convergence by more than an order of magnitude.
Scalable Differentiable Physics for Learning and Control
Jul 04, 2020



Differentiable physics is a powerful approach to learning and control problems that involve physical objects and environments. While notable progress has been made, the capabilities of differentiable physics solvers remain limited. We develop a scalable framework for differentiable physics that can support a large number of objects and their interactions. To accommodate objects with arbitrary geometry and topology, we adopt meshes as our representation and leverage the sparsity of contacts for scalable differentiable collision handling. Collisions are resolved in localized regions to minimize the number of optimization variables even when the number of simulated objects is high. We further accelerate implicit differentiation of optimization with nonlinear constraints. Experiments demonstrate that the presented framework requires up to two orders of magnitude less memory and computation in comparison to recent particle-based methods. We further validate the approach on inverse problems and control scenarios, where it outperforms derivative-free and model-free baselines by at least an order of magnitude.