 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Differentiable Physics for Learning and Control
Paper and Code
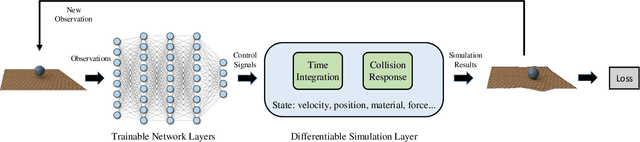



Differentiable physics is a powerful approach to learning and control problems that involve physical objects and environments. While notable progress has been made, the capabilities of differentiable physics solvers remain limited. We develop a scalable framework for differentiable physics that can support a large number of objects and their interactions. To accommodate objects with arbitrary geometry and topology, we adopt meshes as our representation and leverage the sparsity of contacts for scalable differentiable collision handling. Collisions are resolved in localized regions to minimize the number of optimization variables even when the number of simulated objects is high. We further accelerate implicit differentiation of optimization with nonlinear constraints. Experiments demonstrate that the presented framework requires up to two orders of magnitude less memory and computation in comparison to recent particle-based methods. We further validate the approach on inverse problems and control scenarios, where it outperforms derivative-free and model-free baselines by at least an order of magnitude.