 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Improving Autonomous Underwater Manipulation
Paper and Code
Oct 24, 2024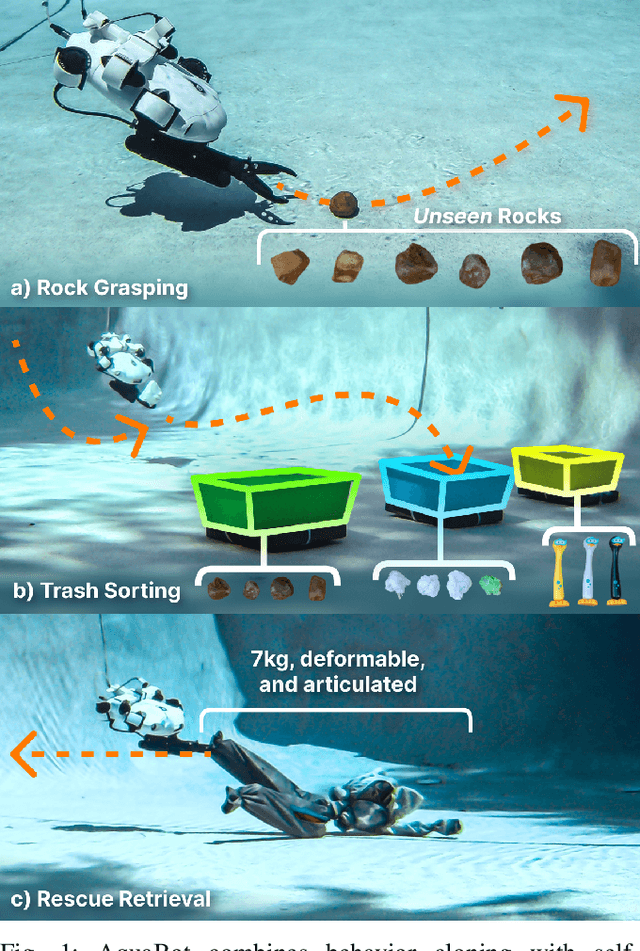
Underwater robotic manipulation faces significant challenges due to complex fluid dynamics and unstructured environments, causing most manipulation systems to rely heavily on human teleoperation. In this paper, we introduce AquaBot, a fully autonomous manipulation system that combines behavior cloning from human demonstrations with self-learning optimization to improve beyond human teleoperation performance. With extensive real-world experiments, we demonstrate AquaBot's versatility across diverse manipulation tasks, including object grasping, trash sorting, and rescue retrieval. Our real-world experiments show that AquaBot's self-optimized policy outperforms a human operator by 41% in speed. AquaBot represents a promising step towards autonomous and self-improving underwater manipulation systems. We open-source both hardware and software implementation details.