 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Improving Autonomous Underwater Manipulation
Oct 24, 2024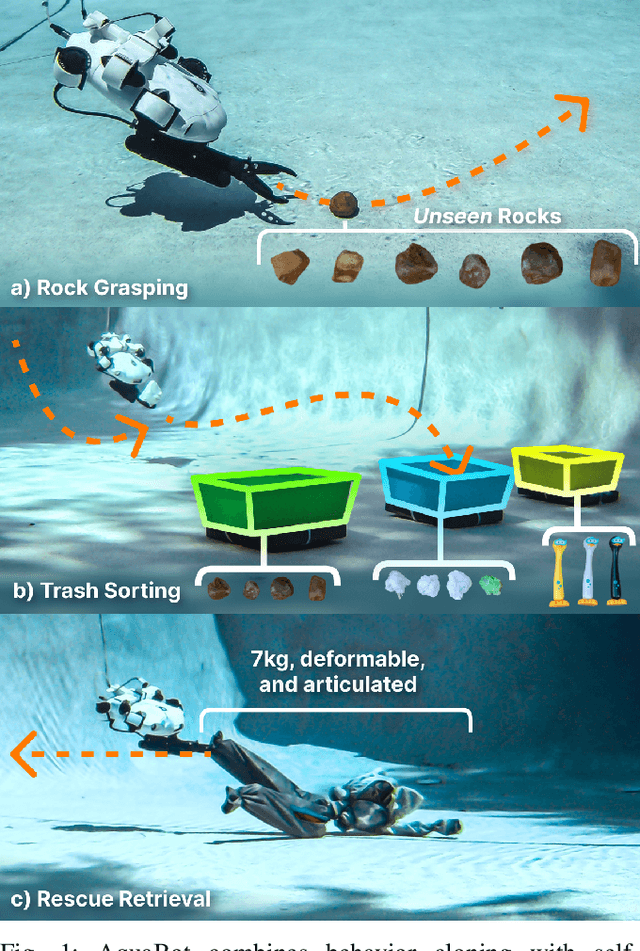
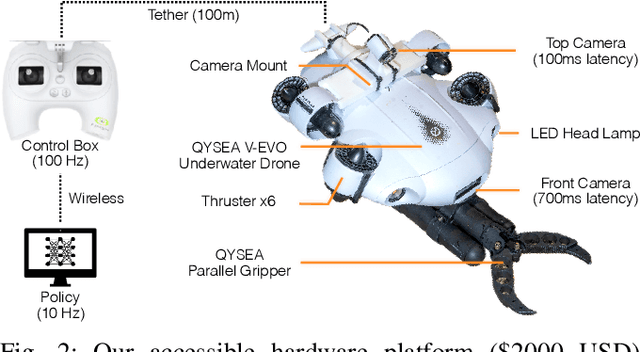
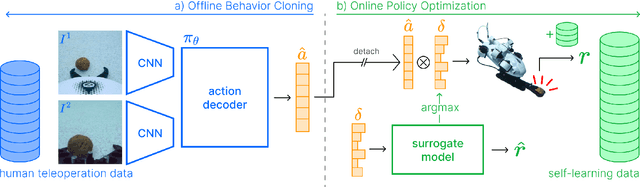
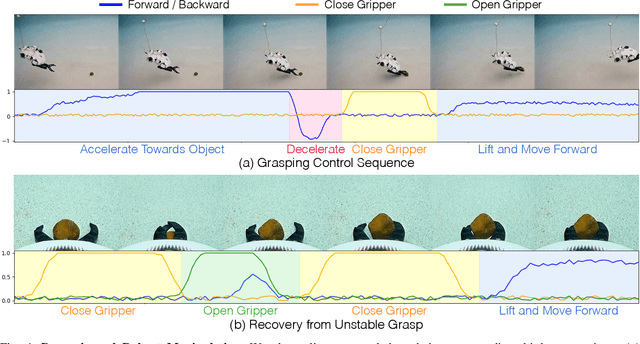
Underwater robotic manipulation faces significant challenges due to complex fluid dynamics and unstructured environments, causing most manipulation systems to rely heavily on human teleoperation. In this paper, we introduce AquaBot, a fully autonomous manipulation system that combines behavior cloning from human demonstrations with self-learning optimization to improve beyond human teleoperation performance. With extensive real-world experiments, we demonstrate AquaBot's versatility across diverse manipulation tasks, including object grasping, trash sorting, and rescue retrieval. Our real-world experiments show that AquaBot's self-optimized policy outperforms a human operator by 41% in speed. AquaBot represents a promising step towards autonomous and self-improving underwater manipulation systems. We open-source both hardware and software implementation details.
OceanPlan: Hierarchical Planning and Replanning for Natural Language AUV Piloting in Large-scale Unexplored Ocean Environments
Mar 22, 2024We develop a hierarchical LLM-task-motion planning and replanning framework to efficiently ground an abstracted human command into tangible Autonomous Underwater Vehicle (AUV) control through enhanced representations of the world. We also incorporate a holistic replanner to provide real-world feedback with all planners for robust AUV operation. While there has been extensive research in bridging the gap between LLMs and robotic missions, they are unable to guarantee success of AUV applications in the vast and unknown ocean environment. To tackle specific challenges in marine robotics, we design a hierarchical planner to compose executable motion plans, which achieves planning efficiency and solution quality by decomposing long-horizon missions into sub-tasks. At the same time, real-time data stream is obtained by a replanner to address environmental uncertainties during plan execution. Experiments validate that our proposed framework delivers successful AUV performance of long-duration missions through natural language piloting.
OceanChat: Piloting Autonomous Underwater Vehicles in Natural Language
Sep 27, 2023



In the trending research of fusing Large Language Models (LLMs) and robotics, we aim to pave the way for innovative development of AI systems that can enable Autonomous Underwater Vehicles (AUVs) to seamlessly interact with humans in an intuitive manner. We propose OceanChat, a system that leverages a closed-loop LLM-guided task and motion planning framework to tackle AUV missions in the wild. LLMs translate an abstract human command into a high-level goal, while a task planner further grounds the goal into a task sequence with logical constraints. To assist the AUV with understanding the task sequence, we utilize a motion planner to incorporate real-time Lagrangian data streams received by the AUV, thus mapping the task sequence into an executable motion plan. Considering the highly dynamic and partially known nature of the underwater environment, an event-triggered replanning scheme is developed to enhance the system's robustness towards uncertainty. We also build a simulation platform HoloEco that generates photo-realistic simulation for a wide range of AUV applications. Experimental evaluation verifies that the proposed system can achieve improved performance in terms of both success rate and computation time. Project website: \url{https://sites.google.com/view/oceanchat}
Real-time Autonomous Glider Navigation Software
Apr 25, 2023



Underwater gliders are widely utilized for ocean sampling, surveillance, and other various oceanic applications. In the context of complex ocean environments, gliders may yield poor navigation performance due to strong ocean currents, thus requiring substantial human effort during the manual piloting process. To enhance navigation accuracy, we developed a real-time autonomous glider navigation software, named GENIoS Python, which generates waypoints based on flow predictions to assist human piloting. The software is designed to closely check glider status, provide customizable experiment settings, utilize lightweight computing resources, offer stably communicate with dockservers, robustly run for extended operation time, and quantitatively compare flow estimates, which add to its value as an autonomous tool for underwater glider navigation.
Anomaly Detection of Underwater Gliders Verified by Deployment Data
Dec 27, 2022



This paper utilizes an anomaly detection algorithm to check if underwater gliders are operating normally in the unknown ocean environment. Glider pilots can be warned of the detected glider anomaly in real time, thus taking over the glider appropriately and avoiding further damage to the glider. The adopted algorithm is validated by two valuable sets of data in real glider deployments, the University of South Florida (USF) glider Stella and the Skidaway Institute of Oceanography (SkIO) glider Angus.
The Rational Selection of Goal Operations and the Integration ofSearch Strategies with Goal-Driven Autonomy
Jan 21, 2022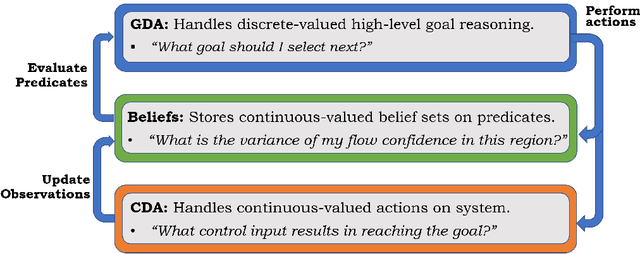
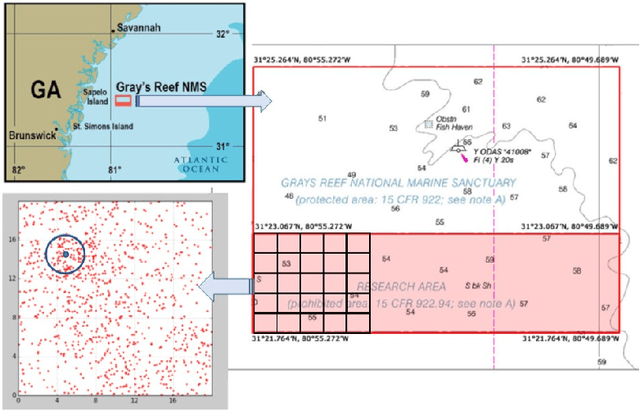
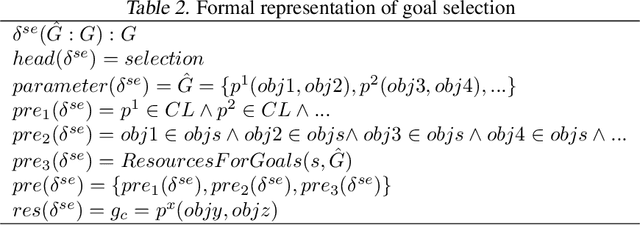
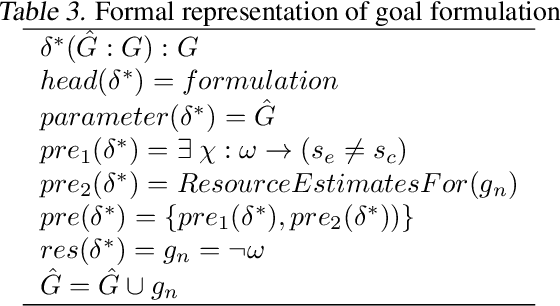
Intelligent physical systems as embodied cognitive systems must perform high-level reasoning while concurrently managing an underlying control architecture. The link between cognition and control must manage the problem of converting continuous values from the real world to symbolic representations (and back). To generate effective behaviors, reasoning must include a capacity to replan, acquire and update new information, detect and respond to anomalies, and perform various operations on system goals. But, these processes are not independent and need further exploration. This paper examines an agent's choices when multiple goal operations co-occur and interact, and it establishes a method of choosing between them. We demonstrate the benefits and discuss the trade offs involved with this and show positive results in a dynamic marine search task.