 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeanCat: A Benchmark Suite for Formal Category Theory in Lean (Part I: 1-Categories)
Dec 31, 2025Large language models (LLMs) have made rapid progress in formal theorem proving, yet current benchmarks under-measure the kind of abstraction and library-mediated reasoning that organizes modern mathematics. In parallel with FATE's emphasis on frontier algebra, we introduce LeanCat, a Lean benchmark for category-theoretic formalization -- a unifying language for mathematical structure and a core layer of modern proof engineering -- serving as a stress test of structural, interface-level reasoning. Part I: 1-Categories contains 100 fully formalized statement-level tasks, curated into topic families and three difficulty tiers via an LLM-assisted + human grading process. The best model solves 8.25% of tasks at pass@1 (32.50%/4.17%/0.00% by Easy/Medium/High) and 12.00% at pass@4 (50.00%/4.76%/0.00%). We also evaluate LeanBridge which use LeanExplore to search Mathlib, and observe consistent gains over single-model baselines. LeanCat is intended as a compact, reusable checkpoint for tracking both AI and human progress toward reliable, research-level formalization in Lean.
Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model
Dec 23, 2025Recent strides in video generation have paved the way for unified audio-visual generation. In this work, we present Seedance 1.5 pro, a foundational model engineered specifically for native, joint audio-video generation. Leveraging a dual-branch Diffusion Transformer architecture, the model integrates a cross-modal joint module with a specialized multi-stage data pipeline, achieving exceptional audio-visual synchronization and superior generation quality. To ensure practical utility, we implement meticulous post-training optimizations, including Supervised Fine-Tuning (SFT) on high-quality datasets and Reinforcement Learning from Human Feedback (RLHF) with multi-dimensional reward models. Furthermore, we introduce an acceleration framework that boosts inference speed by over 10X. Seedance 1.5 pro distinguishes itself through precise multilingual and dialect lip-syncing, dynamic cinematic camera control, and enhanced narrative coherence, positioning it as a robust engine for professional-grade content creation. Seedance 1.5 pro is now accessible on Volcano Engine at https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?type=GenVideo.
Improving Fast Adversarial Training via Self-Knowledge Guidance
Sep 26, 2024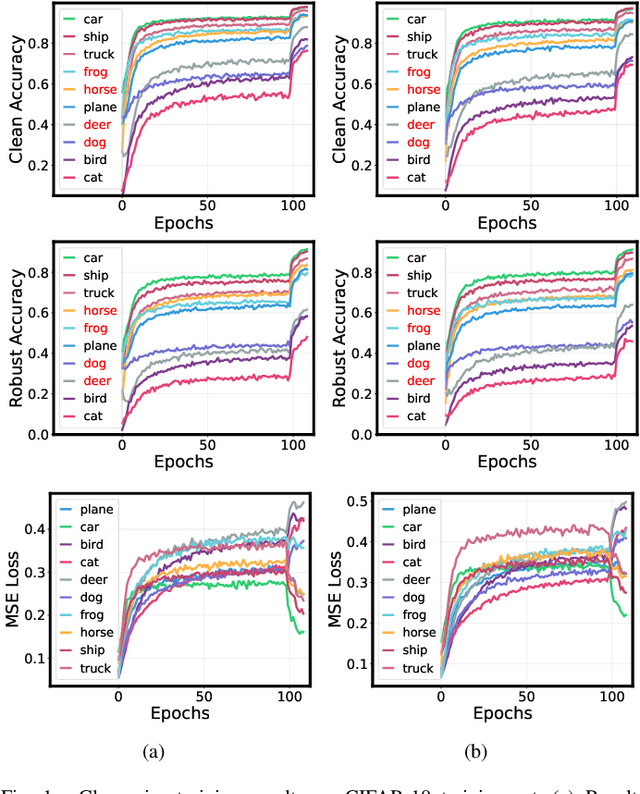
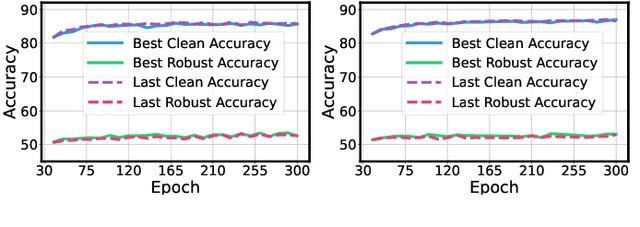
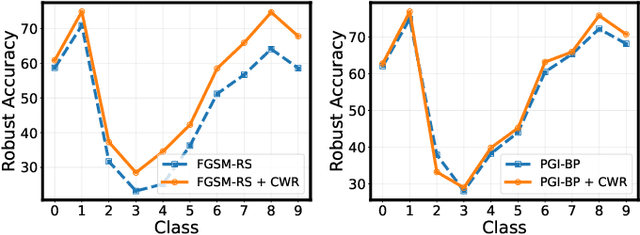
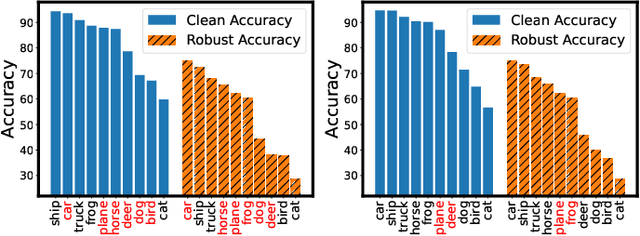
Adversarial training has achieved remarkable advancements in defending against adversarial attacks. Among them, fast adversarial training (FAT) is gaining attention for its ability to achieve competitive robustness with fewer computing resources. Existing FAT methods typically employ a uniform strategy that optimizes all training data equally without considering the influence of different examples, which leads to an imbalanced optimization. However, this imbalance remains unexplored in the field of FAT. In this paper, we conduct a comprehensive study of the imbalance issue in FAT and observe an obvious class disparity regarding their performances. This disparity could be embodied from a perspective of alignment between clean and robust accuracy. Based on the analysis, we mainly attribute the observed misalignment and disparity to the imbalanced optimization in FAT, which motivates us to optimize different training data adaptively to enhance robustness. Specifically, we take disparity and misalignment into consideration. First, we introduce self-knowledge guided regularization, which assigns differentiated regularization weights to each class based on its training state, alleviating class disparity. Additionally, we propose self-knowledge guided label relaxation, which adjusts label relaxation according to the training accuracy, alleviating the misalignment and improving robustness. By combining these methods, we formulate the Self-Knowledge Guided FAT (SKG-FAT), leveraging naturally generated knowledge during training to enhance the adversarial robustness without compromising training efficiency. Extensive experiments on four standard datasets demonstrate that the SKG-FAT improves the robustness and preserves competitive clean accuracy, outperforming the state-of-the-art methods.
OceanChat: Piloting Autonomous Underwater Vehicles in Natural Language
Sep 27, 2023



In the trending research of fusing Large Language Models (LLMs) and robotics, we aim to pave the way for innovative development of AI systems that can enable Autonomous Underwater Vehicles (AUVs) to seamlessly interact with humans in an intuitive manner. We propose OceanChat, a system that leverages a closed-loop LLM-guided task and motion planning framework to tackle AUV missions in the wild. LLMs translate an abstract human command into a high-level goal, while a task planner further grounds the goal into a task sequence with logical constraints. To assist the AUV with understanding the task sequence, we utilize a motion planner to incorporate real-time Lagrangian data streams received by the AUV, thus mapping the task sequence into an executable motion plan. Considering the highly dynamic and partially known nature of the underwater environment, an event-triggered replanning scheme is developed to enhance the system's robustness towards uncertainty. We also build a simulation platform HoloEco that generates photo-realistic simulation for a wide range of AUV applications. Experimental evaluation verifies that the proposed system can achieve improved performance in terms of both success rate and computation time. Project website: \url{https://sites.google.com/view/oceanchat}