 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOLMoASR: Open Models and Data for Training Robust Speech Recognition Models
Aug 28, 2025Improvements in training data scale and quality have led to significant advances, yet its influence in speech recognition remains underexplored. In this paper, we present a large-scale dataset, OLMoASR-Pool, and series of models, OLMoASR, to study and develop robust zero-shot speech recognition models. Beginning from OLMoASR-Pool, a collection of 3M hours of English audio and 17M transcripts, we design text heuristic filters to remove low-quality or mistranscribed data. Our curation pipeline produces a new dataset containing 1M hours of high-quality audio-transcript pairs, which we call OLMoASR-Mix. We use OLMoASR-Mix to train the OLMoASR-Mix suite of models, ranging from 39M (tiny.en) to 1.5B (large.en) parameters. Across all model scales, OLMoASR achieves comparable average performance to OpenAI's Whisper on short and long-form speech recognition benchmarks. Notably, OLMoASR-medium.en attains a 12.8\% and 11.0\% word error rate (WER) that is on par with Whisper's largest English-only model Whisper-medium.en's 12.4\% and 10.5\% WER for short and long-form recognition respectively (at equivalent parameter count). OLMoASR-Pool, OLMoASR models, and filtering, training and evaluation code will be made publicly available to further research on robust speech processing.
Scaling Text-Rich Image Understanding via Code-Guided Synthetic Multimodal Data Generation
Feb 20, 2025Reasoning about images with rich text, such as charts and documents, is a critical application of vision-language models (VLMs). However, VLMs often struggle in these domains due to the scarcity of diverse text-rich vision-language data. To address this challenge, we present CoSyn, a framework that leverages the coding capabilities of text-only large language models (LLMs) to automatically create synthetic text-rich multimodal data. Given input text describing a target domain (e.g., "nutrition fact labels"), CoSyn prompts an LLM to generate code (Python, HTML, LaTeX, etc.) for rendering synthetic images. With the underlying code as textual representations of the synthetic images, CoSyn can generate high-quality instruction-tuning data, again relying on a text-only LLM. Using CoSyn, we constructed a dataset comprising 400K images and 2.7M rows of vision-language instruction-tuning data. Comprehensive experiments on seven benchmarks demonstrate that models trained on our synthetic data achieve state-of-the-art performance among competitive open-source models, including Llama 3.2, and surpass proprietary models such as GPT-4V and Gemini 1.5 Flash. Furthermore, CoSyn can produce synthetic pointing data, enabling VLMs to ground information within input images, showcasing its potential for developing multimodal agents capable of acting in real-world environments.
From an Image to a Scene: Learning to Imagine the World from a Million 360 Videos
Dec 10, 2024Three-dimensional (3D) understanding of objects and scenes play a key role in humans' ability to interact with the world and has been an active area of research in computer vision, graphics, and robotics. Large scale synthetic and object-centric 3D datasets have shown to be effective in training models that have 3D understanding of objects. However, applying a similar approach to real-world objects and scenes is difficult due to a lack of large-scale data. Videos are a potential source for real-world 3D data, but finding diverse yet corresponding views of the same content has shown to be difficult at scale. Furthermore, standard videos come with fixed viewpoints, determined at the time of capture. This restricts the ability to access scenes from a variety of more diverse and potentially useful perspectives. We argue that large scale 360 videos can address these limitations to provide: scalable corresponding frames from diverse views. In this paper, we introduce 360-1M, a 360 video dataset, and a process for efficiently finding corresponding frames from diverse viewpoints at scale. We train our diffusion-based model, Odin, on 360-1M. Empowered by the largest real-world, multi-view dataset to date, Odin is able to freely generate novel views of real-world scenes. Unlike previous methods, Odin can move the camera through the environment, enabling the model to infer the geometry and layout of the scene. Additionally, we show improved performance on standard novel view synthesis and 3D reconstruction benchmarks.
Molmo and PixMo: Open Weights and Open Data for State-of-the-Art Multimodal Models
Sep 25, 2024



Today's most advanced multimodal models remain proprietary. The strongest open-weight models rely heavily on synthetic data from proprietary VLMs to achieve good performance, effectively distilling these closed models into open ones. As a result, the community is still missing foundational knowledge about how to build performant VLMs from scratch. We present Molmo, a new family of VLMs that are state-of-the-art in their class of openness. Our key innovation is a novel, highly detailed image caption dataset collected entirely from human annotators using speech-based descriptions. To enable a wide array of user interactions, we also introduce a diverse dataset mixture for fine-tuning that includes in-the-wild Q&A and innovative 2D pointing data. The success of our approach relies on careful choices for the model architecture details, a well-tuned training pipeline, and, most critically, the quality of our newly collected datasets, all of which will be released. The best-in-class 72B model within the Molmo family not only outperforms others in the class of open weight and data models but also compares favorably against proprietary systems like GPT-4o, Claude 3.5, and Gemini 1.5 on both academic benchmarks and human evaluation. We will be releasing all of our model weights, captioning and fine-tuning data, and source code in the near future. Select model weights, inference code, and demo are available at https://molmo.allenai.org.
Objaverse-XL: A Universe of 10M+ 3D Objects
Jul 11, 2023Natural language processing and 2D vision models have attained remarkable proficiency on many tasks primarily by escalating the scale of training data. However, 3D vision tasks have not seen the same progress, in part due to the challenges of acquiring high-quality 3D data. In this work, we present Objaverse-XL, a dataset of over 10 million 3D objects. Our dataset comprises deduplicated 3D objects from a diverse set of sources, including manually designed objects, photogrammetry scans of landmarks and everyday items, and professional scans of historic and antique artifacts. Representing the largest scale and diversity in the realm of 3D datasets, Objaverse-XL enables significant new possibilities for 3D vision. Our experiments demonstrate the improvements enabled with the scale provided by Objaverse-XL. We show that by training Zero123 on novel view synthesis, utilizing over 100 million multi-view rendered images, we achieve strong zero-shot generalization abilities. We hope that releasing Objaverse-XL will enable further innovations in the field of 3D vision at scale.
Objaverse: A Universe of Annotated 3D Objects
Dec 15, 2022Massive data corpora like WebText, Wikipedia, Conceptual Captions, WebImageText, and LAION have propelled recent dramatic progress in AI. Large neural models trained on such datasets produce impressive results and top many of today's benchmarks. A notable omission within this family of large-scale datasets is 3D data. Despite considerable interest and potential applications in 3D vision, datasets of high-fidelity 3D models continue to be mid-sized with limited diversity of object categories. Addressing this gap, we present Objaverse 1.0, a large dataset of objects with 800K+ (and growing) 3D models with descriptive captions, tags, and animations. Objaverse improves upon present day 3D repositories in terms of scale, number of categories, and in the visual diversity of instances within a category. We demonstrate the large potential of Objaverse via four diverse applications: training generative 3D models, improving tail category segmentation on the LVIS benchmark, training open-vocabulary object-navigation models for Embodied AI, and creating a new benchmark for robustness analysis of vision models. Objaverse can open new directions for research and enable new applications across the field of AI.
Phone2Proc: Bringing Robust Robots Into Our Chaotic World
Dec 08, 2022Training embodied agents in simulation has become mainstream for the embodied AI community. However, these agents often struggle when deployed in the physical world due to their inability to generalize to real-world environments. In this paper, we present Phone2Proc, a method that uses a 10-minute phone scan and conditional procedural generation to create a distribution of training scenes that are semantically similar to the target environment. The generated scenes are conditioned on the wall layout and arrangement of large objects from the scan, while also sampling lighting, clutter, surface textures, and instances of smaller objects with randomized placement and materials. Leveraging just a simple RGB camera, training with Phone2Proc shows massive improvements from 34.7% to 70.7% success rate in sim-to-real ObjectNav performance across a test suite of over 200 trials in diverse real-world environments, including homes, offices, and RoboTHOR. Furthermore, Phone2Proc's diverse distribution of generated scenes makes agents remarkably robust to changes in the real world, such as human movement, object rearrangement, lighting changes, or clutter.
Retrospectives on the Embodied AI Workshop
Oct 17, 2022
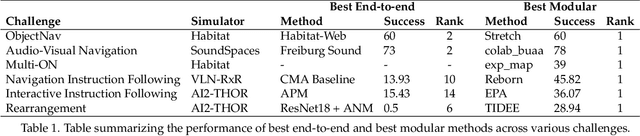
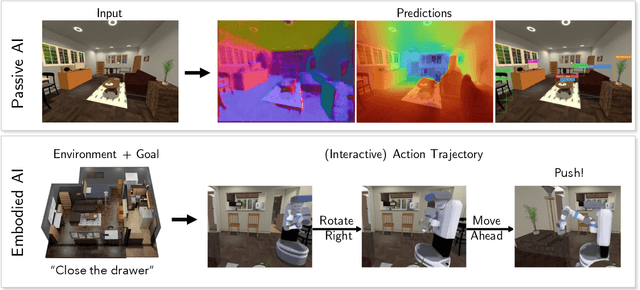
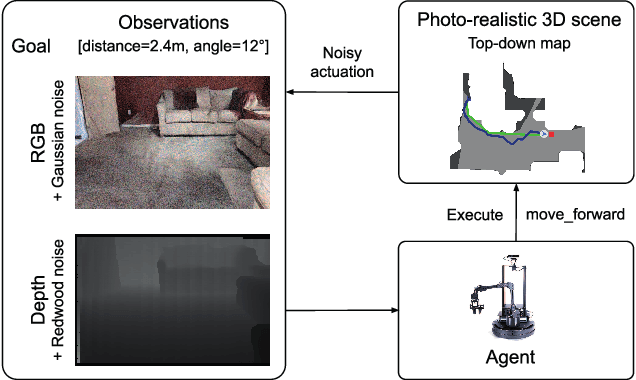
We present a retrospective on the state of Embodied AI research. Our analysis focuses on 13 challenges presented at the Embodied AI Workshop at CVPR. These challenges are grouped into three themes: (1) visual navigation, (2) rearrangement, and (3) embodied vision-and-language. We discuss the dominant datasets within each theme, evaluation metrics for the challenges, and the performance of state-of-the-art models. We highlight commonalities between top approaches to the challenges and identify potential future directions for Embodied AI research.
ProcTHOR: Large-Scale Embodied AI Using Procedural Generation
Jun 14, 2022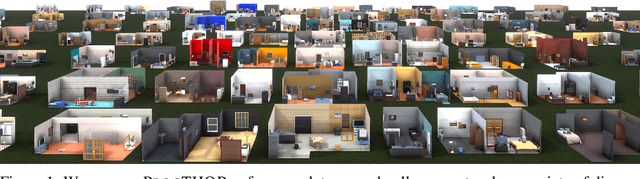

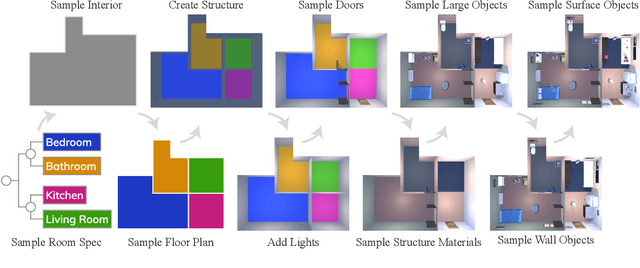
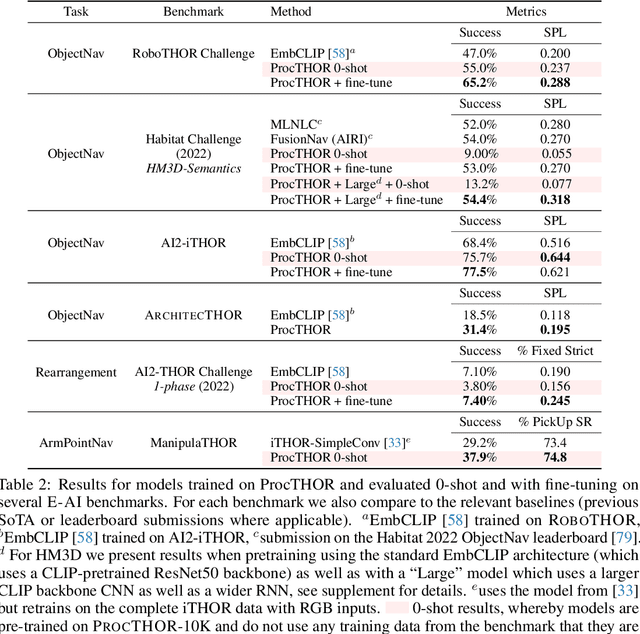
Massive datasets and high-capacity models have driven many recent advancements in computer vision and natural language understanding. This work presents a platform to enable similar success stories in Embodied AI. We propose ProcTHOR, a framework for procedural generation of Embodied AI environments. ProcTHOR enables us to sample arbitrarily large datasets of diverse, interactive, customizable, and performant virtual environments to train and evaluate embodied agents across navigation, interaction, and manipulation tasks. We demonstrate the power and potential of ProcTHOR via a sample of 10,000 generated houses and a simple neural model. Models trained using only RGB images on ProcTHOR, with no explicit mapping and no human task supervision produce state-of-the-art results across 6 embodied AI benchmarks for navigation, rearrangement, and arm manipulation, including the presently running Habitat 2022, AI2-THOR Rearrangement 2022, and RoboTHOR challenges. We also demonstrate strong 0-shot results on these benchmarks, via pre-training on ProcTHOR with no fine-tuning on the downstream benchmark, often beating previous state-of-the-art systems that access the downstream training data.
Visual Room Rearrangement
Mar 30, 2021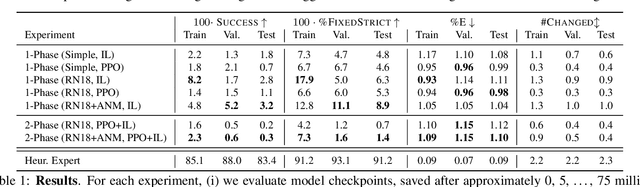
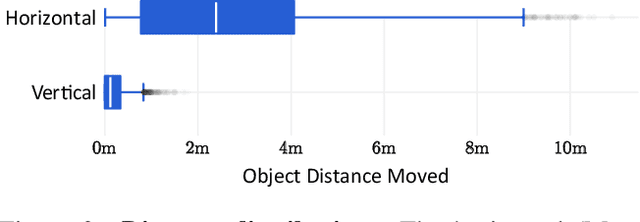
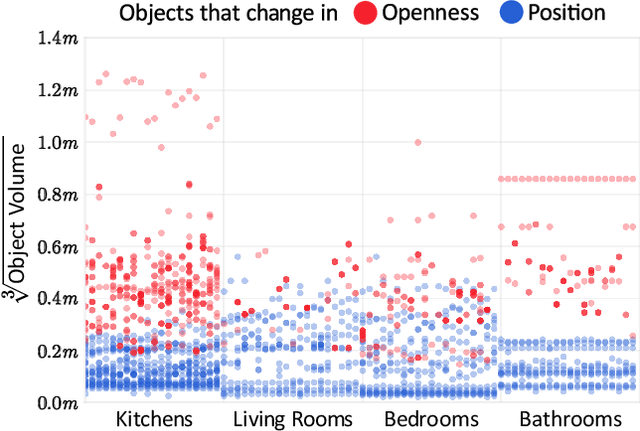
There has been a significant recent progress in the field of Embodied AI with researchers developing models and algorithms enabling embodied agents to navigate and interact within completely unseen environments. In this paper, we propose a new dataset and baseline models for the task of Rearrangement. We particularly focus on the task of Room Rearrangement: an agent begins by exploring a room and recording objects' initial configurations. We then remove the agent and change the poses and states (e.g., open/closed) of some objects in the room. The agent must restore the initial configurations of all objects in the room. Our dataset, named RoomR, includes 6,000 distinct rearrangement settings involving 72 different object types in 120 scenes. Our experiments show that solving this challenging interactive task that involves navigation and object interaction is beyond the capabilities of the current state-of-the-art techniques for embodied tasks and we are still very far from achieving perfect performance on these types of tasks. The code and the dataset are available at: https://ai2thor.allenai.org/rearrangement