 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxtral
Jul 17, 2025We present Voxtral Mini and Voxtral Small, two multimodal audio chat models. Voxtral is trained to comprehend both spoken audio and text documents, achieving state-of-the-art performance across a diverse range of audio benchmarks, while preserving strong text capabilities. Voxtral Small outperforms a number of closed-source models, while being small enough to run locally. A 32K context window enables the model to handle audio files up to 40 minutes in duration and long multi-turn conversations. We also contribute three benchmarks for evaluating speech understanding models on knowledge and trivia. Both Voxtral models are released under Apache 2.0 license.
Situated Instruction Following
Jul 15, 2024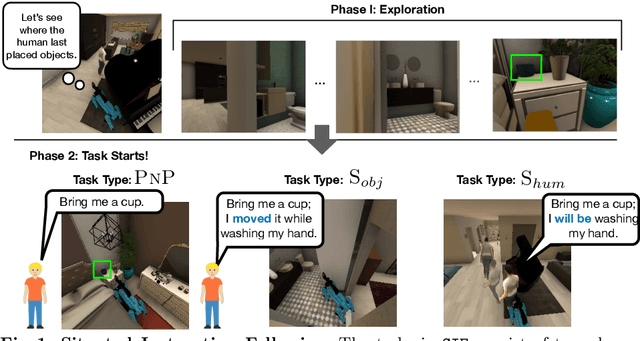
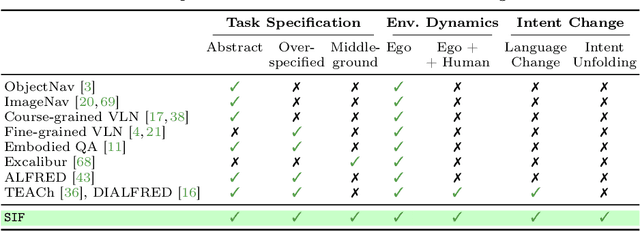
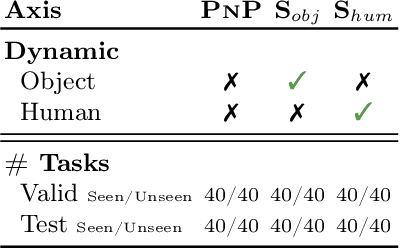
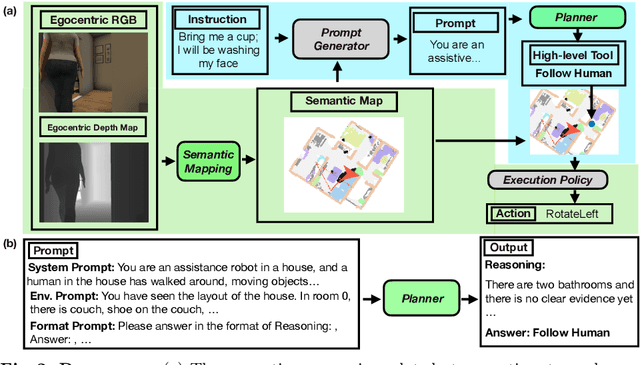
Language is never spoken in a vacuum. It is expressed, comprehended, and contextualized within the holistic backdrop of the speaker's history, actions, and environment. Since humans are used to communicating efficiently with situated language, the practicality of robotic assistants hinge on their ability to understand and act upon implicit and situated instructions. In traditional instruction following paradigms, the agent acts alone in an empty house, leading to language use that is both simplified and artificially "complete." In contrast, we propose situated instruction following, which embraces the inherent underspecification and ambiguity of real-world communication with the physical presence of a human speaker. The meaning of situated instructions naturally unfold through the past actions and the expected future behaviors of the human involved. Specifically, within our settings we have instructions that (1) are ambiguously specified, (2) have temporally evolving intent, (3) can be interpreted more precisely with the agent's dynamic actions. Our experiments indicate that state-of-the-art Embodied Instruction Following (EIF) models lack holistic understanding of situated human intention.
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
GOAT-Bench: A Benchmark for Multi-Modal Lifelong Navigation
Apr 09, 2024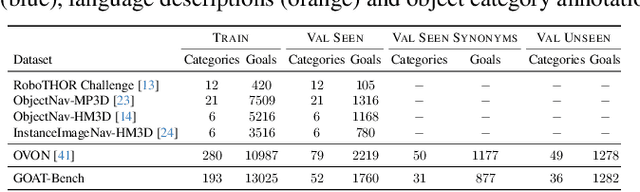
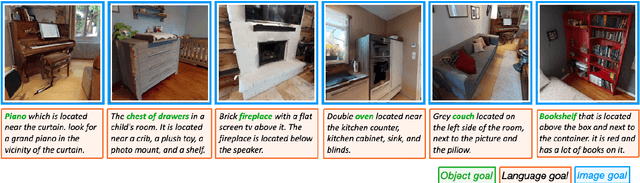
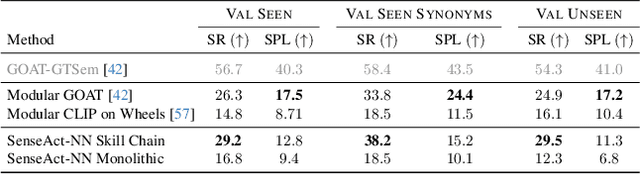
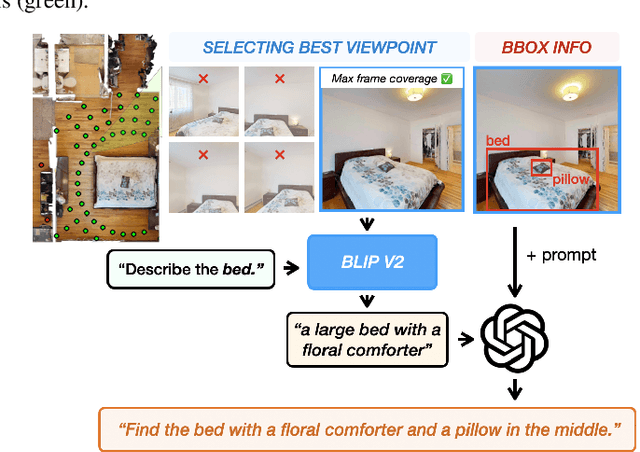
The Embodied AI community has made significant strides in visual navigation tasks, exploring targets from 3D coordinates, objects, language descriptions, and images. However, these navigation models often handle only a single input modality as the target. With the progress achieved so far, it is time to move towards universal navigation models capable of handling various goal types, enabling more effective user interaction with robots. To facilitate this goal, we propose GOAT-Bench, a benchmark for the universal navigation task referred to as GO to AnyThing (GOAT). In this task, the agent is directed to navigate to a sequence of targets specified by the category name, language description, or image in an open-vocabulary fashion. We benchmark monolithic RL and modular methods on the GOAT task, analyzing their performance across modalities, the role of explicit and implicit scene memories, their robustness to noise in goal specifications, and the impact of memory in lifelong scenarios.
Mixtral of Experts
Jan 08, 2024



We introduce Mixtral 8x7B, a Sparse Mixture of Experts (SMoE) language model. Mixtral has the same architecture as Mistral 7B, with the difference that each layer is composed of 8 feedforward blocks (i.e. experts). For every token, at each layer, a router network selects two experts to process the current state and combine their outputs. Even though each token only sees two experts, the selected experts can be different at each timestep. As a result, each token has access to 47B parameters, but only uses 13B active parameters during inference. Mixtral was trained with a context size of 32k tokens and it outperforms or matches Llama 2 70B and GPT-3.5 across all evaluated benchmarks. In particular, Mixtral vastly outperforms Llama 2 70B on mathematics, code generation, and multilingual benchmarks. We also provide a model fine-tuned to follow instructions, Mixtral 8x7B - Instruct, that surpasses GPT-3.5 Turbo, Claude-2.1, Gemini Pro, and Llama 2 70B - chat model on human benchmarks. Both the base and instruct models are released under the Apache 2.0 license.
GOAT: GO to Any Thing
Nov 10, 2023



In deployment scenarios such as homes and warehouses, mobile robots are expected to autonomously navigate for extended periods, seamlessly executing tasks articulated in terms that are intuitively understandable by human operators. We present GO To Any Thing (GOAT), a universal navigation system capable of tackling these requirements with three key features: a) Multimodal: it can tackle goals specified via category labels, target images, and language descriptions, b) Lifelong: it benefits from its past experience in the same environment, and c) Platform Agnostic: it can be quickly deployed on robots with different embodiments. GOAT is made possible through a modular system design and a continually augmented instance-aware semantic memory that keeps track of the appearance of objects from different viewpoints in addition to category-level semantics. This enables GOAT to distinguish between different instances of the same category to enable navigation to targets specified by images and language descriptions. In experimental comparisons spanning over 90 hours in 9 different homes consisting of 675 goals selected across 200+ different object instances, we find GOAT achieves an overall success rate of 83%, surpassing previous methods and ablations by 32% (absolute improvement). GOAT improves with experience in the environment, from a 60% success rate at the first goal to a 90% success after exploration. In addition, we demonstrate that GOAT can readily be applied to downstream tasks such as pick and place and social navigation.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.
Mistral 7B
Oct 10, 2023



We introduce Mistral 7B v0.1, a 7-billion-parameter language model engineered for superior performance and efficiency. Mistral 7B outperforms Llama 2 13B across all evaluated benchmarks, and Llama 1 34B in reasoning, mathematics, and code generation. Our model leverages grouped-query attention (GQA) for faster inference, coupled with sliding window attention (SWA) to effectively handle sequences of arbitrary length with a reduced inference cost. We also provide a model fine-tuned to follow instructions, Mistral 7B -- Instruct, that surpasses the Llama 2 13B -- Chat model both on human and automated benchmarks. Our models are released under the Apache 2.0 license.
HomeRobot: Open-Vocabulary Mobile Manipulation
Jun 20, 2023



HomeRobot (noun): An affordable compliant robot that navigates homes and manipulates a wide range of objects in order to complete everyday tasks. Open-Vocabulary Mobile Manipulation (OVMM) is the problem of picking any object in any unseen environment, and placing it in a commanded location. This is a foundational challenge for robots to be useful assistants in human environments, because it involves tackling sub-problems from across robotics: perception, language understanding, navigation, and manipulation are all essential to OVMM. In addition, integration of the solutions to these sub-problems poses its own substantial challenges. To drive research in this area, we introduce the HomeRobot OVMM benchmark, where an agent navigates household environments to grasp novel objects and place them on target receptacles. HomeRobot has two components: a simulation component, which uses a large and diverse curated object set in new, high-quality multi-room home environments; and a real-world component, providing a software stack for the low-cost Hello Robot Stretch to encourage replication of real-world experiments across labs. We implement both reinforcement learning and heuristic (model-based) baselines and show evidence of sim-to-real transfer. Our baselines achieve a 20% success rate in the real world; our experiments identify ways future research work improve performance. See videos on our website: https://ovmm.github.io/.
Galactic: Scaling End-to-End Reinforcement Learning for Rearrangement at 100k Steps-Per-Second
Jun 13, 2023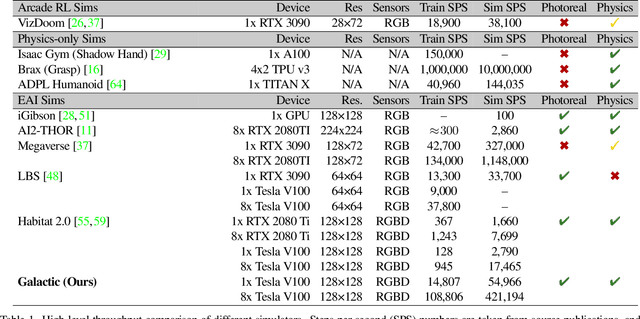
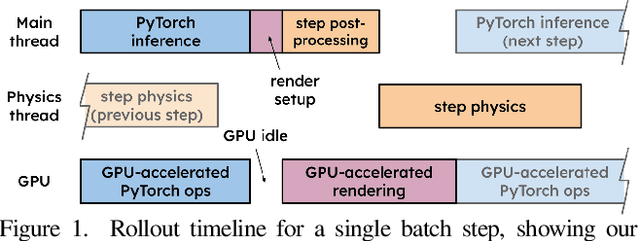
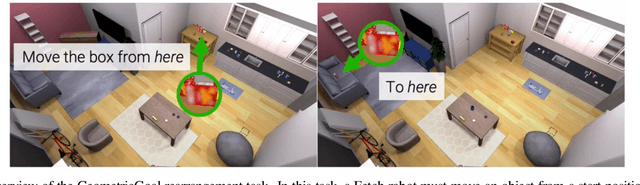
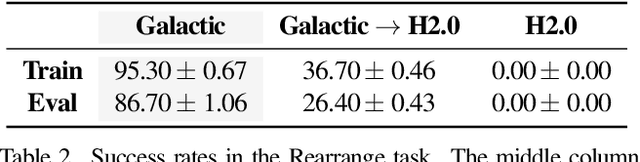
We present Galactic, a large-scale simulation and reinforcement-learning (RL) framework for robotic mobile manipulation in indoor environments. Specifically, a Fetch robot (equipped with a mobile base, 7DoF arm, RGBD camera, egomotion, and onboard sensing) is spawned in a home environment and asked to rearrange objects - by navigating to an object, picking it up, navigating to a target location, and then placing the object at the target location. Galactic is fast. In terms of simulation speed (rendering + physics), Galactic achieves over 421,000 steps-per-second (SPS) on an 8-GPU node, which is 54x faster than Habitat 2.0 (7699 SPS). More importantly, Galactic was designed to optimize the entire rendering + physics + RL interplay since any bottleneck in the interplay slows down training. In terms of simulation+RL speed (rendering + physics + inference + learning), Galactic achieves over 108,000 SPS, which 88x faster than Habitat 2.0 (1243 SPS). These massive speed-ups not only drastically cut the wall-clock training time of existing experiments, but also unlock an unprecedented scale of new experiments. First, Galactic can train a mobile pick skill to >80% accuracy in under 16 minutes, a 100x speedup compared to the over 24 hours it takes to train the same skill in Habitat 2.0. Second, we use Galactic to perform the largest-scale experiment to date for rearrangement using 5B steps of experience in 46 hours, which is equivalent to 20 years of robot experience. This scaling results in a single neural network composed of task-agnostic components achieving 85% success in GeometricGoal rearrangement, compared to 0% success reported in Habitat 2.0 for the same approach. The code is available at github.com/facebookresearch/galactic.