 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIFT-GS: Cross-Scene Render-Supervised Distillation for 3D Language Grounding
Feb 27, 2025Our approach to training 3D vision-language understanding models is to train a feedforward model that makes predictions in 3D, but never requires 3D labels and is supervised only in 2D, using 2D losses and differentiable rendering. The approach is new for vision-language understanding. By treating the reconstruction as a ``latent variable'', we can render the outputs without placing unnecessary constraints on the network architecture (e.g. can be used with decoder-only models). For training, only need images and camera pose, and 2D labels. We show that we can even remove the need for 2D labels by using pseudo-labels from pretrained 2D models. We demonstrate this to pretrain a network, and we finetune it for 3D vision-language understanding tasks. We show this approach outperforms baselines/sota for 3D vision-language grounding, and also outperforms other 3D pretraining techniques. Project page: https://liftgs.github.io.
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
GOAT-Bench: A Benchmark for Multi-Modal Lifelong Navigation
Apr 09, 2024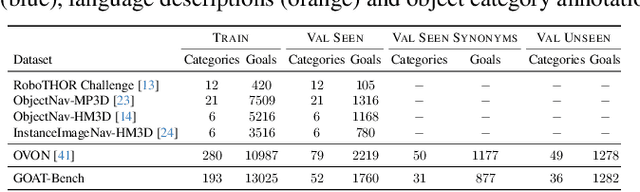
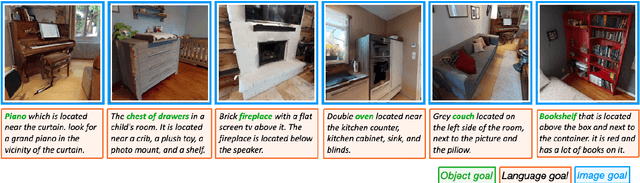
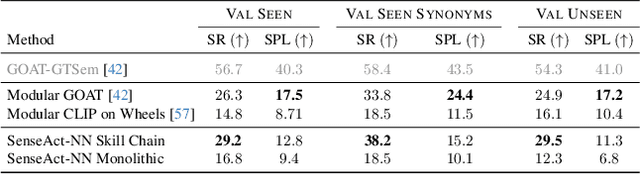
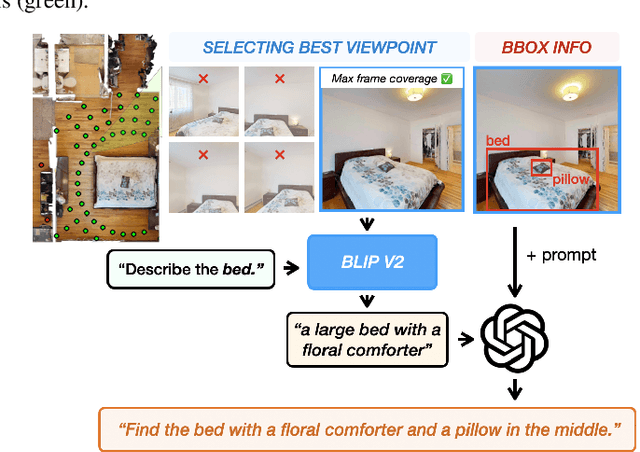
The Embodied AI community has made significant strides in visual navigation tasks, exploring targets from 3D coordinates, objects, language descriptions, and images. However, these navigation models often handle only a single input modality as the target. With the progress achieved so far, it is time to move towards universal navigation models capable of handling various goal types, enabling more effective user interaction with robots. To facilitate this goal, we propose GOAT-Bench, a benchmark for the universal navigation task referred to as GO to AnyThing (GOAT). In this task, the agent is directed to navigate to a sequence of targets specified by the category name, language description, or image in an open-vocabulary fashion. We benchmark monolithic RL and modular methods on the GOAT task, analyzing their performance across modalities, the role of explicit and implicit scene memories, their robustness to noise in goal specifications, and the impact of memory in lifelong scenarios.
GOAT: GO to Any Thing
Nov 10, 2023



In deployment scenarios such as homes and warehouses, mobile robots are expected to autonomously navigate for extended periods, seamlessly executing tasks articulated in terms that are intuitively understandable by human operators. We present GO To Any Thing (GOAT), a universal navigation system capable of tackling these requirements with three key features: a) Multimodal: it can tackle goals specified via category labels, target images, and language descriptions, b) Lifelong: it benefits from its past experience in the same environment, and c) Platform Agnostic: it can be quickly deployed on robots with different embodiments. GOAT is made possible through a modular system design and a continually augmented instance-aware semantic memory that keeps track of the appearance of objects from different viewpoints in addition to category-level semantics. This enables GOAT to distinguish between different instances of the same category to enable navigation to targets specified by images and language descriptions. In experimental comparisons spanning over 90 hours in 9 different homes consisting of 675 goals selected across 200+ different object instances, we find GOAT achieves an overall success rate of 83%, surpassing previous methods and ablations by 32% (absolute improvement). GOAT improves with experience in the environment, from a 60% success rate at the first goal to a 90% success after exploration. In addition, we demonstrate that GOAT can readily be applied to downstream tasks such as pick and place and social navigation.
FACTS: First Amplify Correlations and Then Slice to Discover Bias
Sep 29, 2023



Computer vision datasets frequently contain spurious correlations between task-relevant labels and (easy to learn) latent task-irrelevant attributes (e.g. context). Models trained on such datasets learn "shortcuts" and underperform on bias-conflicting slices of data where the correlation does not hold. In this work, we study the problem of identifying such slices to inform downstream bias mitigation strategies. We propose First Amplify Correlations and Then Slice to Discover Bias (FACTS), wherein we first amplify correlations to fit a simple bias-aligned hypothesis via strongly regularized empirical risk minimization. Next, we perform correlation-aware slicing via mixture modeling in bias-aligned feature space to discover underperforming data slices that capture distinct correlations. Despite its simplicity, our method considerably improves over prior work (by as much as 35% precision@10) in correlation bias identification across a range of diverse evaluation settings. Our code is available at: https://github.com/yvsriram/FACTS.
HomeRobot: Open-Vocabulary Mobile Manipulation
Jun 20, 2023



HomeRobot (noun): An affordable compliant robot that navigates homes and manipulates a wide range of objects in order to complete everyday tasks. Open-Vocabulary Mobile Manipulation (OVMM) is the problem of picking any object in any unseen environment, and placing it in a commanded location. This is a foundational challenge for robots to be useful assistants in human environments, because it involves tackling sub-problems from across robotics: perception, language understanding, navigation, and manipulation are all essential to OVMM. In addition, integration of the solutions to these sub-problems poses its own substantial challenges. To drive research in this area, we introduce the HomeRobot OVMM benchmark, where an agent navigates household environments to grasp novel objects and place them on target receptacles. HomeRobot has two components: a simulation component, which uses a large and diverse curated object set in new, high-quality multi-room home environments; and a real-world component, providing a software stack for the low-cost Hello Robot Stretch to encourage replication of real-world experiments across labs. We implement both reinforcement learning and heuristic (model-based) baselines and show evidence of sim-to-real transfer. Our baselines achieve a 20% success rate in the real world; our experiments identify ways future research work improve performance. See videos on our website: https://ovmm.github.io/.
LANCE: Stress-testing Visual Models by Generating Language-guided Counterfactual Images
May 30, 2023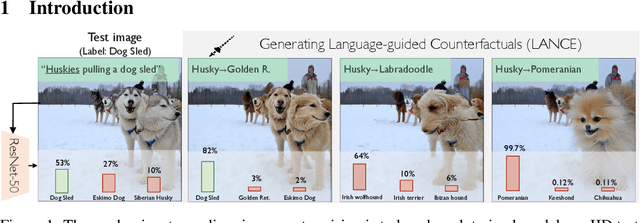
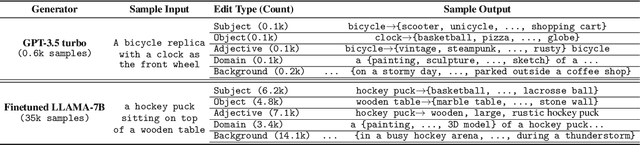
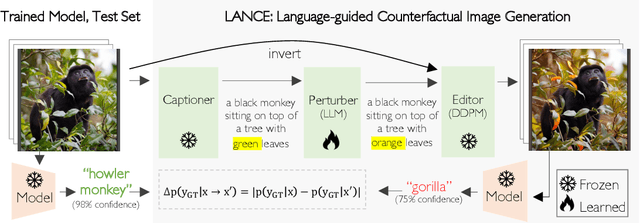

We propose an automated algorithm to stress-test a trained visual model by generating language-guided counterfactual test images (LANCE). Our method leverages recent progress in large language modeling and text-based image editing to augment an IID test set with a suite of diverse, realistic, and challenging test images without altering model weights. We benchmark the performance of a diverse set of pretrained models on our generated data and observe significant and consistent performance drops. We further analyze model sensitivity across different types of edits, and demonstrate its applicability at surfacing previously unknown class-level model biases in ImageNet.
Adapting Self-Supervised Vision Transformers by Probing Attention-Conditioned Masking Consistency
Jun 16, 2022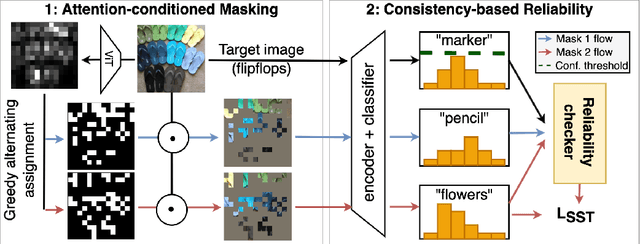
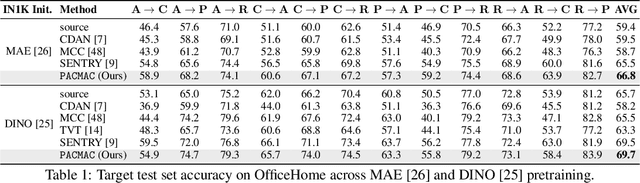
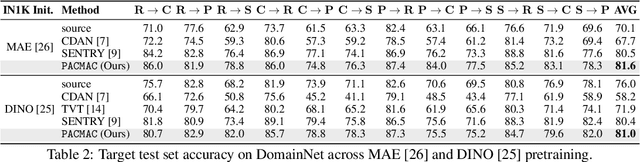
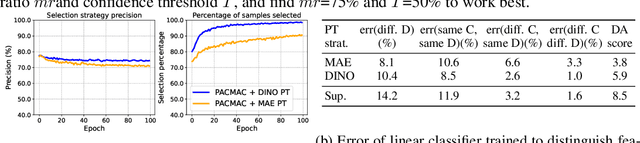
Visual domain adaptation (DA) seeks to transfer trained models to unseen, unlabeled domains across distribution shift, but approaches typically focus on adapting convolutional neural network architectures initialized with supervised ImageNet representations. In this work, we shift focus to adapting modern architectures for object recognition -- the increasingly popular Vision Transformer (ViT) -- and modern pretraining based on self-supervised learning (SSL). Inspired by the design of recent SSL approaches based on learning from partial image inputs generated via masking or cropping -- either by learning to predict the missing pixels, or learning representational invariances to such augmentations -- we propose PACMAC, a simple two-stage adaptation algorithm for self-supervised ViTs. PACMAC first performs in-domain SSL on pooled source and target data to learn task-discriminative features, and then probes the model's predictive consistency across a set of partial target inputs generated via a novel attention-conditioned masking strategy, to identify reliable candidates for self-training. Our simple approach leads to consistent performance gains over competing methods that use ViTs and self-supervised initializations on standard object recognition benchmarks. Code available at https://github.com/virajprabhu/PACMAC
Housekeep: Tidying Virtual Households using Commonsense Reasoning
May 22, 2022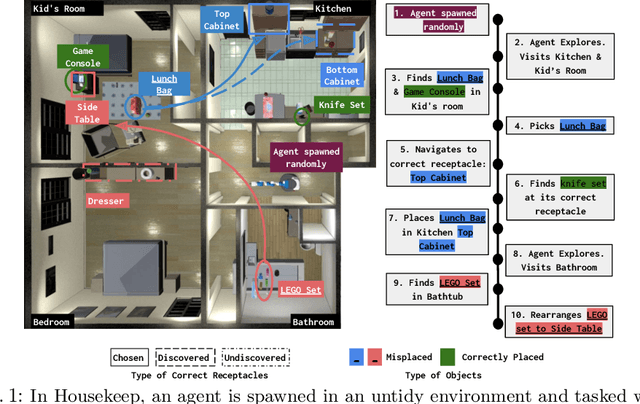

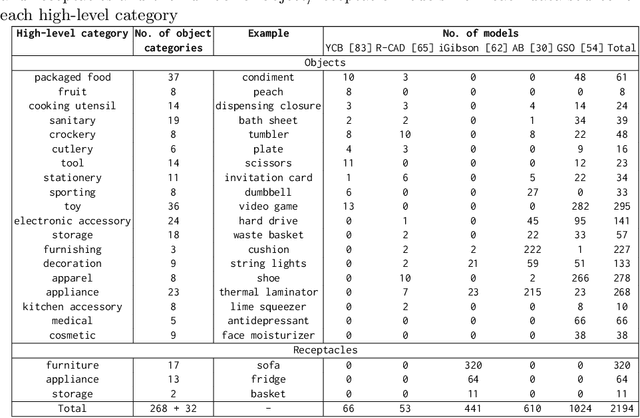
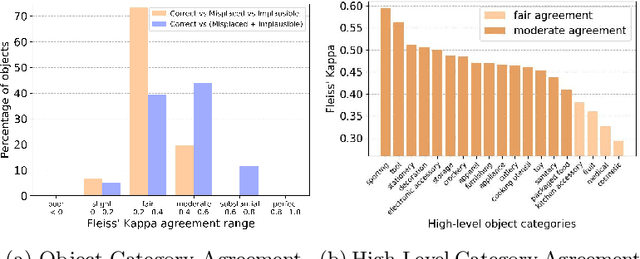
We introduce Housekeep, a benchmark to evaluate commonsense reasoning in the home for embodied AI. In Housekeep, an embodied agent must tidy a house by rearranging misplaced objects without explicit instructions specifying which objects need to be rearranged. Instead, the agent must learn from and is evaluated against human preferences of which objects belong where in a tidy house. Specifically, we collect a dataset of where humans typically place objects in tidy and untidy houses constituting 1799 objects, 268 object categories, 585 placements, and 105 rooms. Next, we propose a modular baseline approach for Housekeep that integrates planning, exploration, and navigation. It leverages a fine-tuned large language model (LLM) trained on an internet text corpus for effective planning. We show that our baseline agent generalizes to rearranging unseen objects in unknown environments. See our webpage for more details: https://yashkant.github.io/housekeep/