 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanity's Last Exam
Jan 24, 2025Benchmarks are important tools for tracking the rapid advancements in large language model (LLM) capabilities. However, benchmarks are not keeping pace in difficulty: LLMs now achieve over 90\% accuracy on popular benchmarks like MMLU, limiting informed measurement of state-of-the-art LLM capabilities. In response, we introduce Humanity's Last Exam (HLE), a multi-modal benchmark at the frontier of human knowledge, designed to be the final closed-ended academic benchmark of its kind with broad subject coverage. HLE consists of 3,000 questions across dozens of subjects, including mathematics, humanities, and the natural sciences. HLE is developed globally by subject-matter experts and consists of multiple-choice and short-answer questions suitable for automated grading. Each question has a known solution that is unambiguous and easily verifiable, but cannot be quickly answered via internet retrieval. State-of-the-art LLMs demonstrate low accuracy and calibration on HLE, highlighting a significant gap between current LLM capabilities and the expert human frontier on closed-ended academic questions. To inform research and policymaking upon a clear understanding of model capabilities, we publicly release HLE at https://lastexam.ai.
PARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks
Oct 31, 2024
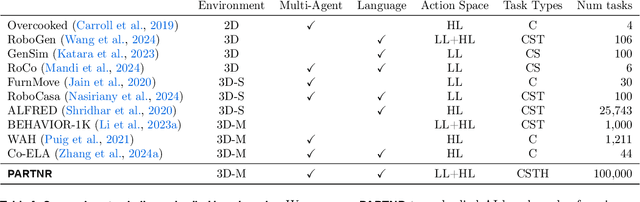

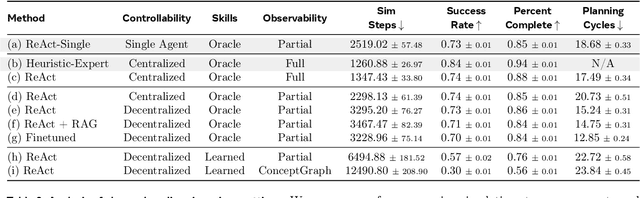
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction.
ReLIC: A Recipe for 64k Steps of In-Context Reinforcement Learning for Embodied AI
Oct 03, 2024Intelligent embodied agents need to quickly adapt to new scenarios by integrating long histories of experience into decision-making. For instance, a robot in an unfamiliar house initially wouldn't know the locations of objects needed for tasks and might perform inefficiently. However, as it gathers more experience, it should learn the layout of its environment and remember where objects are, allowing it to complete new tasks more efficiently. To enable such rapid adaptation to new tasks, we present ReLIC, a new approach for in-context reinforcement learning (RL) for embodied agents. With ReLIC, agents are capable of adapting to new environments using 64,000 steps of in-context experience with full attention while being trained through self-generated experience via RL. We achieve this by proposing a novel policy update scheme for on-policy RL called "partial updates'' as well as a Sink-KV mechanism that enables effective utilization of a long observation history for embodied agents. Our method outperforms a variety of meta-RL baselines in adapting to unseen houses in an embodied multi-object navigation task. In addition, we find that ReLIC is capable of few-shot imitation learning despite never being trained with expert demonstrations. We also provide a comprehensive analysis of ReLIC, highlighting that the combination of large-scale RL training, the proposed partial updates scheme, and the Sink-KV are essential for effective in-context learning. The code for ReLIC and all our experiments is at https://github.com/aielawady/relic
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
GOAT-Bench: A Benchmark for Multi-Modal Lifelong Navigation
Apr 09, 2024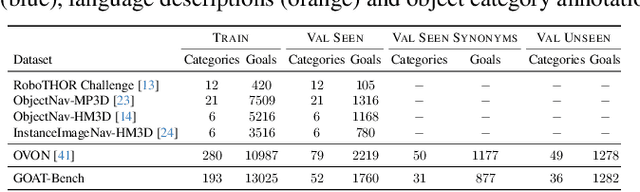
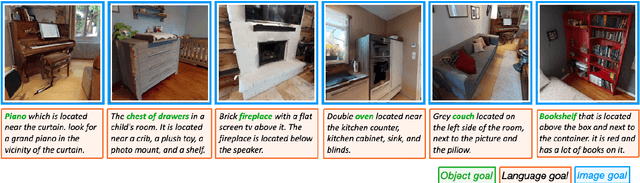
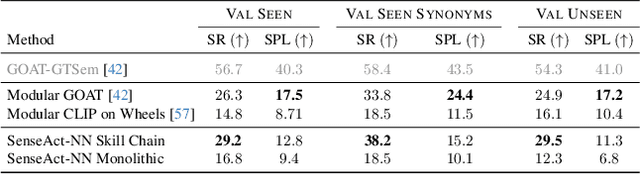
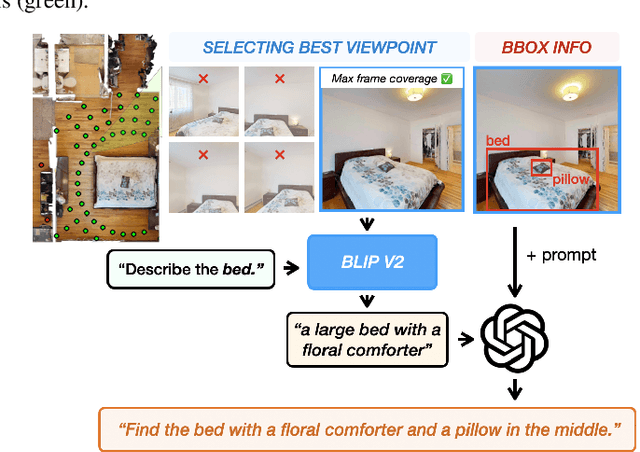
The Embodied AI community has made significant strides in visual navigation tasks, exploring targets from 3D coordinates, objects, language descriptions, and images. However, these navigation models often handle only a single input modality as the target. With the progress achieved so far, it is time to move towards universal navigation models capable of handling various goal types, enabling more effective user interaction with robots. To facilitate this goal, we propose GOAT-Bench, a benchmark for the universal navigation task referred to as GO to AnyThing (GOAT). In this task, the agent is directed to navigate to a sequence of targets specified by the category name, language description, or image in an open-vocabulary fashion. We benchmark monolithic RL and modular methods on the GOAT task, analyzing their performance across modalities, the role of explicit and implicit scene memories, their robustness to noise in goal specifications, and the impact of memory in lifelong scenarios.
BLOOM: A 176B-Parameter Open-Access Multilingual Language Model
Nov 09, 2022Large language models (LLMs) have been shown to be able to perform new tasks based on a few demonstrations or natural language instructions. While these capabilities have led to widespread adoption, most LLMs are developed by resource-rich organizations and are frequently kept from the public. As a step towards democratizing this powerful technology, we present BLOOM, a 176B-parameter open-access language model designed and built thanks to a collaboration of hundreds of researchers. BLOOM is a decoder-only Transformer language model that was trained on the ROOTS corpus, a dataset comprising hundreds of sources in 46 natural and 13 programming languages (59 in total). We find that BLOOM achieves competitive performance on a wide variety of benchmarks, with stronger results after undergoing multitask prompted finetuning. To facilitate future research and applications using LLMs, we publicly release our models and code under the Responsible AI License.
MultiViz: An Analysis Benchmark for Visualizing and Understanding Multimodal Models
Jun 30, 2022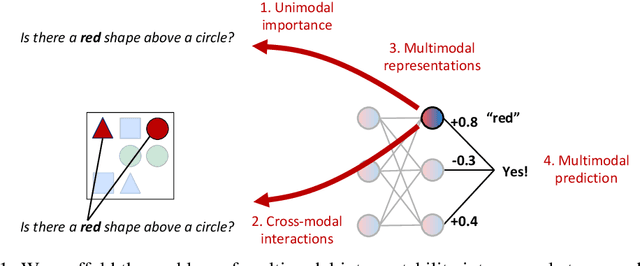
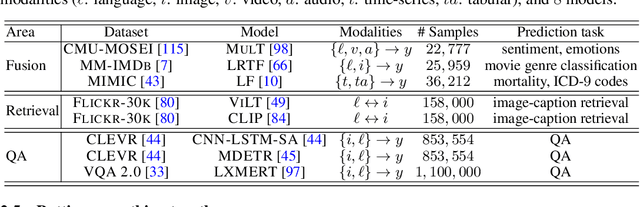
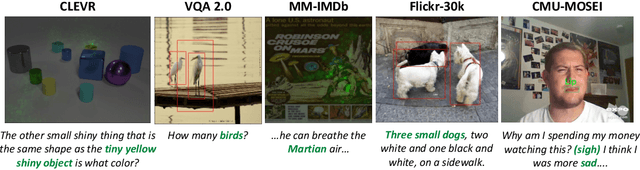
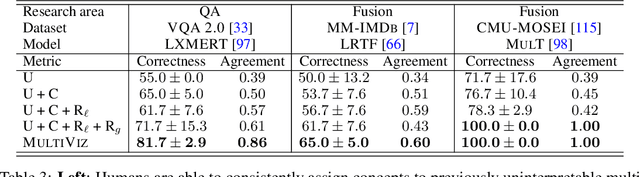
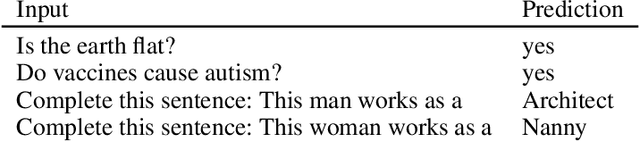
The promise of multimodal models for real-world applications has inspired research in visualizing and understanding their internal mechanics with the end goal of empowering stakeholders to visualize model behavior, perform model debugging, and promote trust in machine learning models. However, modern multimodal models are typically black-box neural networks, which makes it challenging to understand their internal mechanics. How can we visualize the internal modeling of multimodal interactions in these models? Our paper aims to fill this gap by proposing MultiViz, a method for analyzing the behavior of multimodal models by scaffolding the problem of interpretability into 4 stages: (1) unimodal importance: how each modality contributes towards downstream modeling and prediction, (2) cross-modal interactions: how different modalities relate with each other, (3) multimodal representations: how unimodal and cross-modal interactions are represented in decision-level features, and (4) multimodal prediction: how decision-level features are composed to make a prediction. MultiViz is designed to operate on diverse modalities, models, tasks, and research areas. Through experiments on 8 trained models across 6 real-world tasks, we show that the complementary stages in MultiViz together enable users to (1) simulate model predictions, (2) assign interpretable concepts to features, (3) perform error analysis on model misclassifications, and (4) use insights from error analysis to debug models. MultiViz is publicly available, will be regularly updated with new interpretation tools and metrics, and welcomes inputs from the community.
PromptSource: An Integrated Development Environment and Repository for Natural Language Prompts
Feb 02, 2022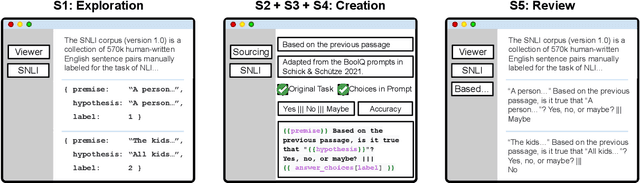
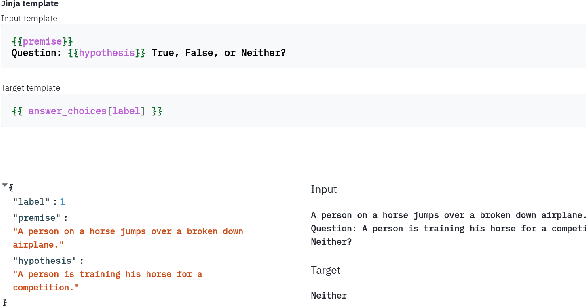
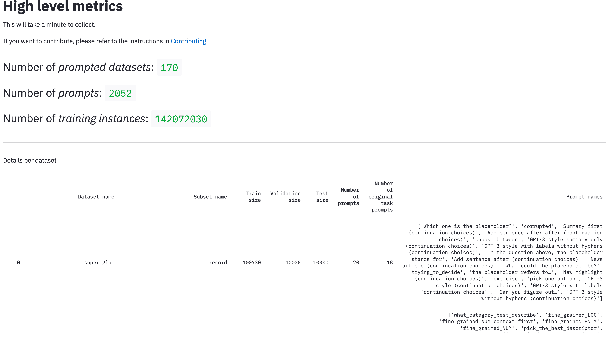
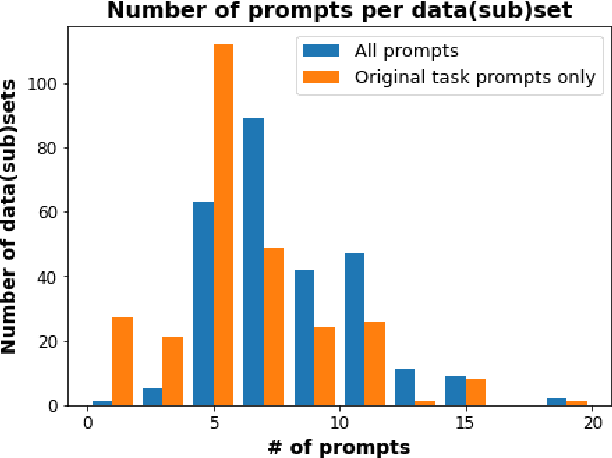
PromptSource is a system for creating, sharing, and using natural language prompts. Prompts are functions that map an example from a dataset to a natural language input and target output. Using prompts to train and query language models is an emerging area in NLP that requires new tools that let users develop and refine these prompts collaboratively. PromptSource addresses the emergent challenges in this new setting with (1) a templating language for defining data-linked prompts, (2) an interface that lets users quickly iterate on prompt development by observing outputs of their prompts on many examples, and (3) a community-driven set of guidelines for contributing new prompts to a common pool. Over 2,000 prompts for roughly 170 datasets are already available in PromptSource. PromptSource is available at https://github.com/bigscience-workshop/promptsource.
Multitask Prompted Training Enables Zero-Shot Task Generalization
Oct 15, 2021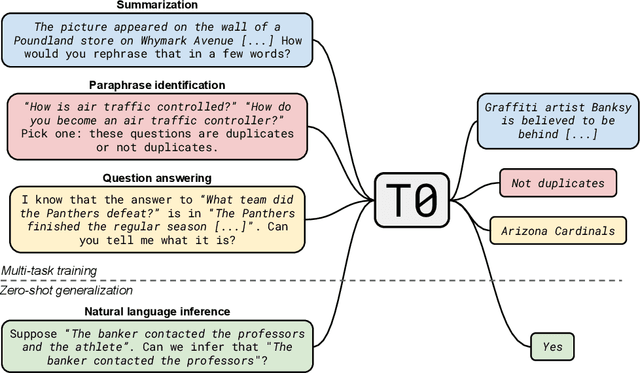

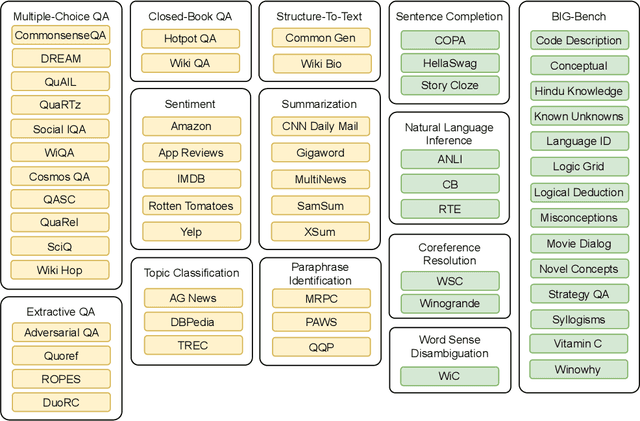
Large language models have recently been shown to attain reasonable zero-shot generalization on a diverse set of tasks. It has been hypothesized that this is a consequence of implicit multitask learning in language model training. Can zero-shot generalization instead be directly induced by explicit multitask learning? To test this question at scale, we develop a system for easily mapping general natural language tasks into a human-readable prompted form. We convert a large set of supervised datasets, each with multiple prompts using varying natural language. These prompted datasets allow for benchmarking the ability of a model to perform completely unseen tasks specified in natural language. We fine-tune a pretrained encoder-decoder model on this multitask mixture covering a wide variety of tasks. The model attains strong zero-shot performance on several standard datasets, often outperforming models 16x its size. Further, our approach attains strong performance on a subset of tasks from the BIG-Bench benchmark, outperforming models 6x its size. All prompts and trained models are available at github.com/bigscience-workshop/promptsource/.
Datasets: A Community Library for Natural Language Processing
Sep 07, 2021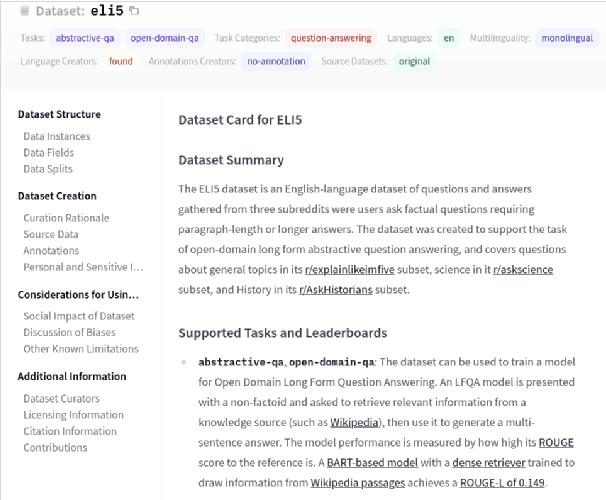
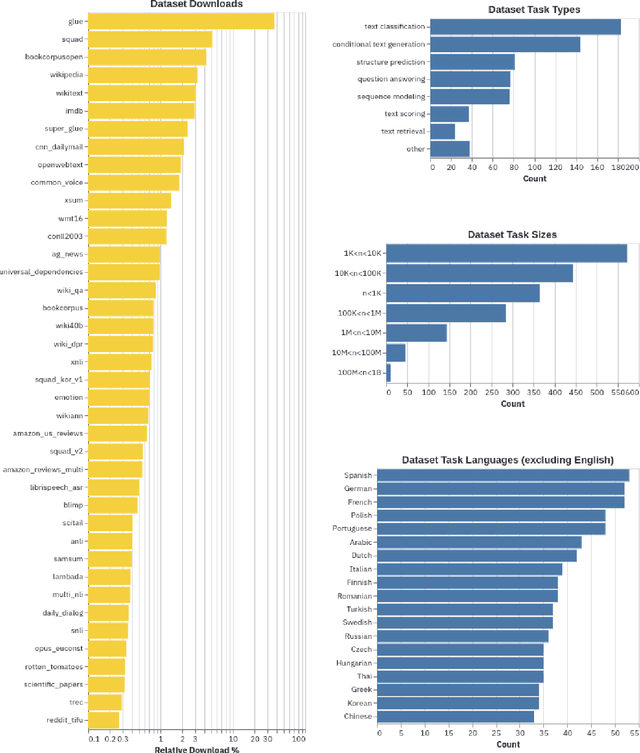
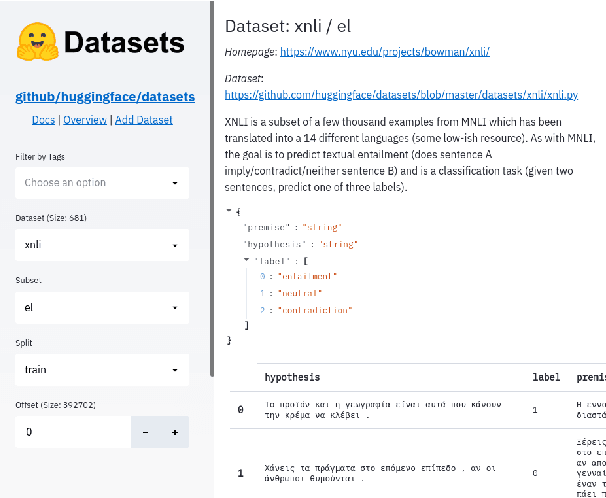
The scale, variety, and quantity of publicly-available NLP datasets has grown rapidly as researchers propose new tasks, larger models, and novel benchmarks. Datasets is a community library for contemporary NLP designed to support this ecosystem. Datasets aims to standardize end-user interfaces, versioning, and documentation, while providing a lightweight front-end that behaves similarly for small datasets as for internet-scale corpora. The design of the library incorporates a distributed, community-driven approach to adding datasets and documenting usage. After a year of development, the library now includes more than 650 unique datasets, has more than 250 contributors, and has helped support a variety of novel cross-dataset research projects and shared tasks. The library is available at https://github.com/huggingface/datasets.