 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReLIC: A Recipe for 64k Steps of In-Context Reinforcement Learning for Embodied AI
Oct 03, 2024Intelligent embodied agents need to quickly adapt to new scenarios by integrating long histories of experience into decision-making. For instance, a robot in an unfamiliar house initially wouldn't know the locations of objects needed for tasks and might perform inefficiently. However, as it gathers more experience, it should learn the layout of its environment and remember where objects are, allowing it to complete new tasks more efficiently. To enable such rapid adaptation to new tasks, we present ReLIC, a new approach for in-context reinforcement learning (RL) for embodied agents. With ReLIC, agents are capable of adapting to new environments using 64,000 steps of in-context experience with full attention while being trained through self-generated experience via RL. We achieve this by proposing a novel policy update scheme for on-policy RL called "partial updates'' as well as a Sink-KV mechanism that enables effective utilization of a long observation history for embodied agents. Our method outperforms a variety of meta-RL baselines in adapting to unseen houses in an embodied multi-object navigation task. In addition, we find that ReLIC is capable of few-shot imitation learning despite never being trained with expert demonstrations. We also provide a comprehensive analysis of ReLIC, highlighting that the combination of large-scale RL training, the proposed partial updates scheme, and the Sink-KV are essential for effective in-context learning. The code for ReLIC and all our experiments is at https://github.com/aielawady/relic
HM3D-OVON: A Dataset and Benchmark for Open-Vocabulary Object Goal Navigation
Sep 22, 2024



We present the Habitat-Matterport 3D Open Vocabulary Object Goal Navigation dataset (HM3D-OVON), a large-scale benchmark that broadens the scope and semantic range of prior Object Goal Navigation (ObjectNav) benchmarks. Leveraging the HM3DSem dataset, HM3D-OVON incorporates over 15k annotated instances of household objects across 379 distinct categories, derived from photo-realistic 3D scans of real-world environments. In contrast to earlier ObjectNav datasets, which limit goal objects to a predefined set of 6-20 categories, HM3D-OVON facilitates the training and evaluation of models with an open-set of goals defined through free-form language at test-time. Through this open-vocabulary formulation, HM3D-OVON encourages progress towards learning visuo-semantic navigation behaviors that are capable of searching for any object specified by text in an open-vocabulary manner. Additionally, we systematically evaluate and compare several different types of approaches on HM3D-OVON. We find that HM3D-OVON can be used to train an open-vocabulary ObjectNav agent that achieves both higher performance and is more robust to localization and actuation noise than the state-of-the-art ObjectNav approach. We hope that our benchmark and baseline results will drive interest in developing embodied agents that can navigate real-world spaces to find household objects specified through free-form language, taking a step towards more flexible and human-like semantic visual navigation. Code and videos available at: naoki.io/ovon.
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
Pre-trained Text-to-Image Diffusion Models Are Versatile Representation Learners for Control
May 09, 2024



Embodied AI agents require a fine-grained understanding of the physical world mediated through visual and language inputs. Such capabilities are difficult to learn solely from task-specific data. This has led to the emergence of pre-trained vision-language models as a tool for transferring representations learned from internet-scale data to downstream tasks and new domains. However, commonly used contrastively trained representations such as in CLIP have been shown to fail at enabling embodied agents to gain a sufficiently fine-grained scene understanding -- a capability vital for control. To address this shortcoming, we consider representations from pre-trained text-to-image diffusion models, which are explicitly optimized to generate images from text prompts and as such, contain text-conditioned representations that reflect highly fine-grained visuo-spatial information. Using pre-trained text-to-image diffusion models, we construct Stable Control Representations which allow learning downstream control policies that generalize to complex, open-ended environments. We show that policies learned using Stable Control Representations are competitive with state-of-the-art representation learning approaches across a broad range of simulated control settings, encompassing challenging manipulation and navigation tasks. Most notably, we show that Stable Control Representations enable learning policies that exhibit state-of-the-art performance on OVMM, a difficult open-vocabulary navigation benchmark.
GOAT-Bench: A Benchmark for Multi-Modal Lifelong Navigation
Apr 09, 2024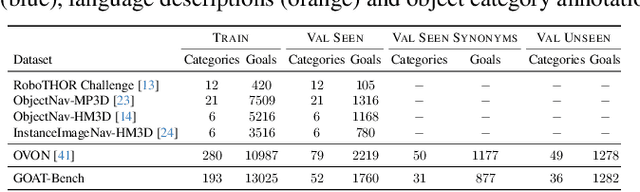
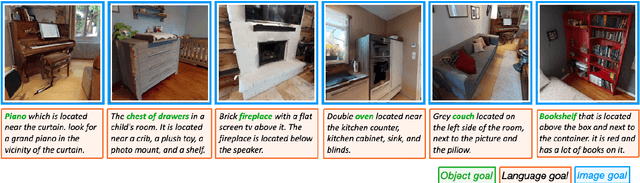
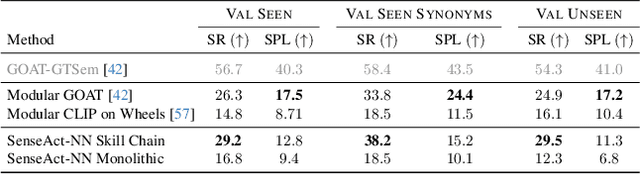
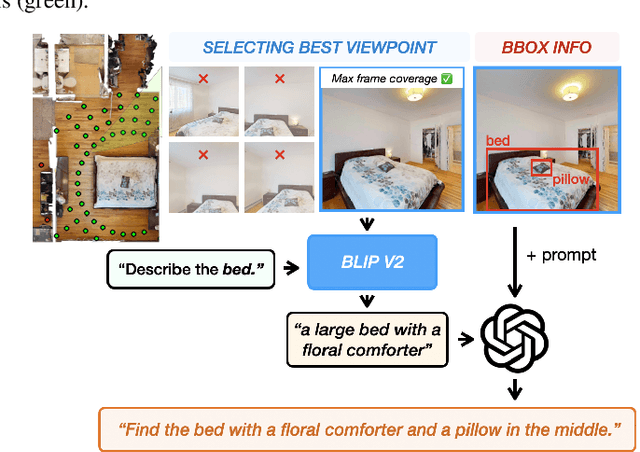
The Embodied AI community has made significant strides in visual navigation tasks, exploring targets from 3D coordinates, objects, language descriptions, and images. However, these navigation models often handle only a single input modality as the target. With the progress achieved so far, it is time to move towards universal navigation models capable of handling various goal types, enabling more effective user interaction with robots. To facilitate this goal, we propose GOAT-Bench, a benchmark for the universal navigation task referred to as GO to AnyThing (GOAT). In this task, the agent is directed to navigate to a sequence of targets specified by the category name, language description, or image in an open-vocabulary fashion. We benchmark monolithic RL and modular methods on the GOAT task, analyzing their performance across modalities, the role of explicit and implicit scene memories, their robustness to noise in goal specifications, and the impact of memory in lifelong scenarios.
Seeing the Unseen: Visual Common Sense for Semantic Placement
Jan 15, 2024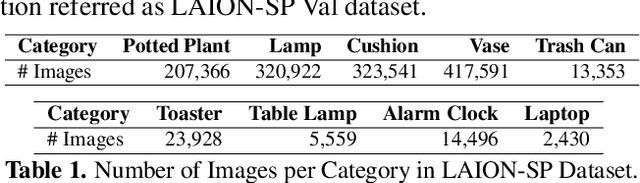
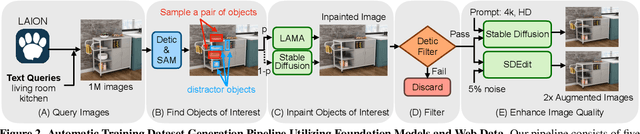
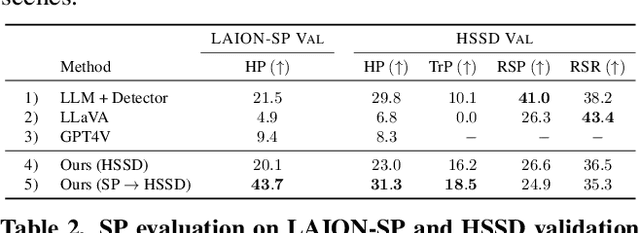
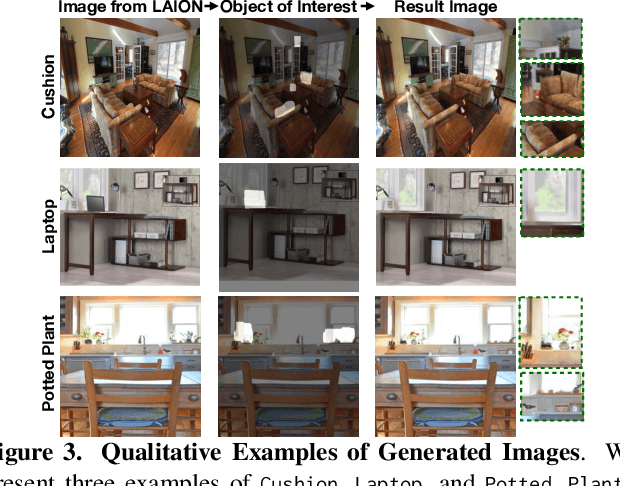
Computer vision tasks typically involve describing what is present in an image (e.g. classification, detection, segmentation, and captioning). We study a visual common sense task that requires understanding what is not present. Specifically, given an image (e.g. of a living room) and name of an object ("cushion"), a vision system is asked to predict semantically-meaningful regions (masks or bounding boxes) in the image where that object could be placed or is likely be placed by humans (e.g. on the sofa). We call this task: Semantic Placement (SP) and believe that such common-sense visual understanding is critical for assitive robots (tidying a house), and AR devices (automatically rendering an object in the user's space). Studying the invisible is hard. Datasets for image description are typically constructed by curating relevant images and asking humans to annotate the contents of the image; neither of those two steps are straightforward for objects not present in the image. We overcome this challenge by operating in the opposite direction: we start with an image of an object in context from web, and then remove that object from the image via inpainting. This automated pipeline converts unstructured web data into a dataset comprising pairs of images with/without the object. Using this, we collect a novel dataset, with ${\sim}1.3$M images across $9$ object categories, and train a SP prediction model called CLIP-UNet. CLIP-UNet outperforms existing VLMs and baselines that combine semantic priors with object detectors on real-world and simulated images. In our user studies, we find that the SP masks predicted by CLIP-UNet are favored $43.7\%$ and $31.3\%$ times when comparing against the $4$ SP baselines on real and simulated images. In addition, we demonstrate leveraging SP mask predictions from CLIP-UNet enables downstream applications like building tidying robots in indoor environments.
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
Dec 15, 2023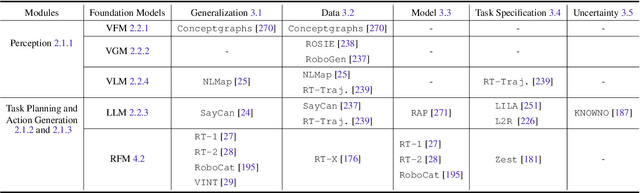

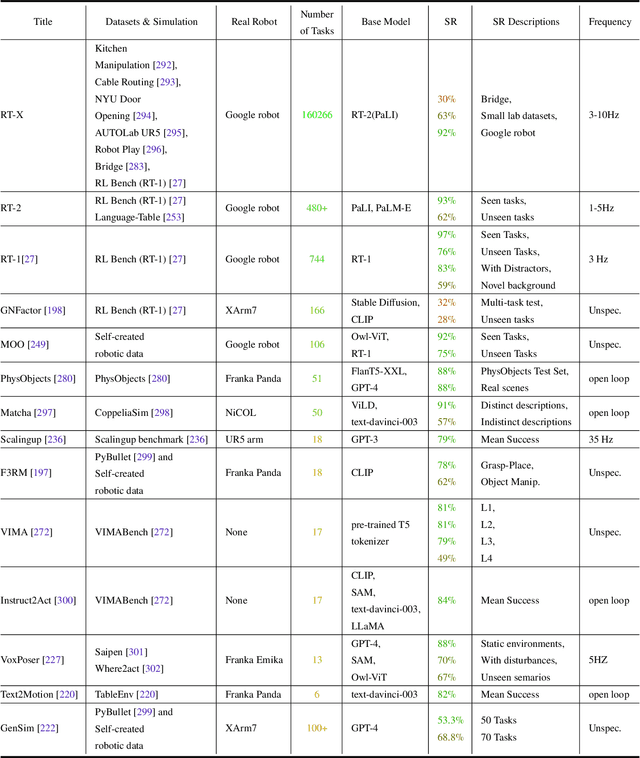
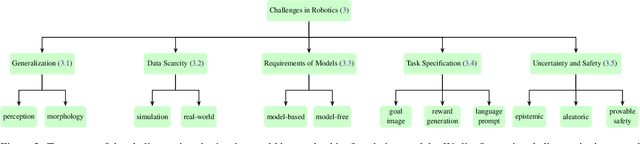
Building general-purpose robots that can operate seamlessly, in any environment, with any object, and utilizing various skills to complete diverse tasks has been a long-standing goal in Artificial Intelligence. Unfortunately, however, most existing robotic systems have been constrained - having been designed for specific tasks, trained on specific datasets, and deployed within specific environments. These systems usually require extensively-labeled data, rely on task-specific models, have numerous generalization issues when deployed in real-world scenarios, and struggle to remain robust to distribution shifts. Motivated by the impressive open-set performance and content generation capabilities of web-scale, large-capacity pre-trained models (i.e., foundation models) in research fields such as Natural Language Processing (NLP) and Computer Vision (CV), we devote this survey to exploring (i) how these existing foundation models from NLP and CV can be applied to the field of robotics, and also exploring (ii) what a robotics-specific foundation model would look like. We begin by providing an overview of what constitutes a conventional robotic system and the fundamental barriers to making it universally applicable. Next, we establish a taxonomy to discuss current work exploring ways to leverage existing foundation models for robotics and develop ones catered to robotics. Finally, we discuss key challenges and promising future directions in using foundation models for enabling general-purpose robotic systems. We encourage readers to view our living GitHub repository of resources, including papers reviewed in this survey as well as related projects and repositories for developing foundation models for robotics.
VLFM: Vision-Language Frontier Maps for Zero-Shot Semantic Navigation
Dec 06, 2023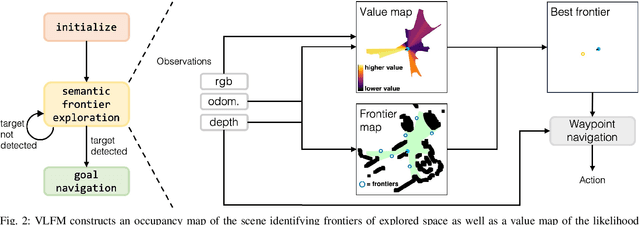
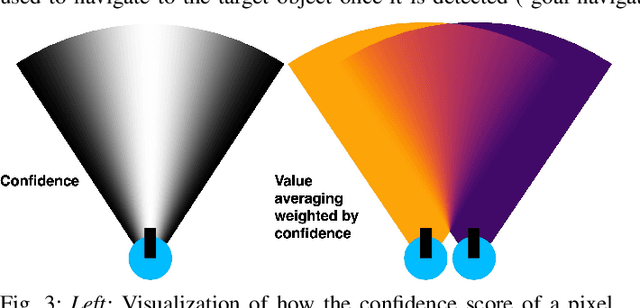
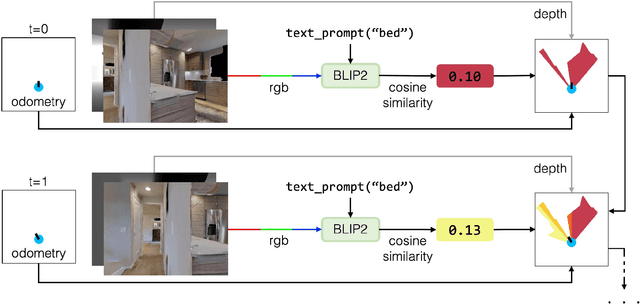
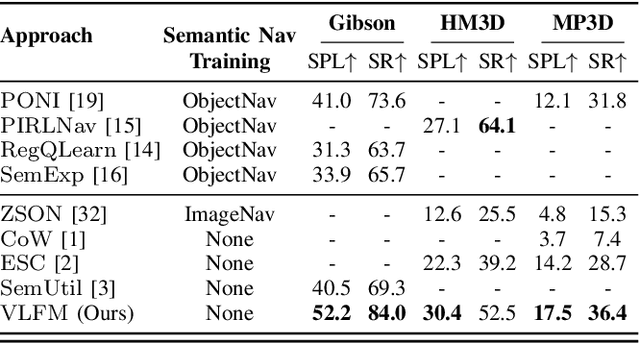
Understanding how humans leverage semantic knowledge to navigate unfamiliar environments and decide where to explore next is pivotal for developing robots capable of human-like search behaviors. We introduce a zero-shot navigation approach, Vision-Language Frontier Maps (VLFM), which is inspired by human reasoning and designed to navigate towards unseen semantic objects in novel environments. VLFM builds occupancy maps from depth observations to identify frontiers, and leverages RGB observations and a pre-trained vision-language model to generate a language-grounded value map. VLFM then uses this map to identify the most promising frontier to explore for finding an instance of a given target object category. We evaluate VLFM in photo-realistic environments from the Gibson, Habitat-Matterport 3D (HM3D), and Matterport 3D (MP3D) datasets within the Habitat simulator. Remarkably, VLFM achieves state-of-the-art results on all three datasets as measured by success weighted by path length (SPL) for the Object Goal Navigation task. Furthermore, we show that VLFM's zero-shot nature enables it to be readily deployed on real-world robots such as the Boston Dynamics Spot mobile manipulation platform. We deploy VLFM on Spot and demonstrate its capability to efficiently navigate to target objects within an office building in the real world, without any prior knowledge of the environment. The accomplishments of VLFM underscore the promising potential of vision-language models in advancing the field of semantic navigation. Videos of real-world deployment can be viewed at naoki.io/vlfm.
GOAT: GO to Any Thing
Nov 10, 2023



In deployment scenarios such as homes and warehouses, mobile robots are expected to autonomously navigate for extended periods, seamlessly executing tasks articulated in terms that are intuitively understandable by human operators. We present GO To Any Thing (GOAT), a universal navigation system capable of tackling these requirements with three key features: a) Multimodal: it can tackle goals specified via category labels, target images, and language descriptions, b) Lifelong: it benefits from its past experience in the same environment, and c) Platform Agnostic: it can be quickly deployed on robots with different embodiments. GOAT is made possible through a modular system design and a continually augmented instance-aware semantic memory that keeps track of the appearance of objects from different viewpoints in addition to category-level semantics. This enables GOAT to distinguish between different instances of the same category to enable navigation to targets specified by images and language descriptions. In experimental comparisons spanning over 90 hours in 9 different homes consisting of 675 goals selected across 200+ different object instances, we find GOAT achieves an overall success rate of 83%, surpassing previous methods and ablations by 32% (absolute improvement). GOAT improves with experience in the environment, from a 60% success rate at the first goal to a 90% success after exploration. In addition, we demonstrate that GOAT can readily be applied to downstream tasks such as pick and place and social navigation.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.