 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStriking the Right Balance between Compute and Copy: Improving LLM Inferencing Under Speculative Decoding
Nov 15, 2025With the skyrocketing costs of GPUs and their virtual instances in the cloud, there is a significant desire to use CPUs for large language model (LLM) inference. KV cache update, often implemented as allocation, copying, and in-place strided update for each generated token, incurs significant overhead. As the sequence length increases, the allocation and copy overheads dominate the performance. Alternate approaches may allocate large KV tensors upfront to enable in-place updates, but these matrices (with zero-padded rows) cause redundant computations. In this work, we propose a new KV cache allocation mechanism called Balancing Memory and Compute (BMC). BMC allocates, once every r iterations, KV tensors with r redundant rows, allowing in-place update without copy overhead for those iterations, but at the expense of a small amount of redundant computation. Second, we make an interesting observation that the extra rows allocated in the KV tensors and the resulting redundant computation can be repurposed for Speculative Decoding (SD) that improves token generation efficiency. Last, BMC represents a spectrum of design points with different values of r. To identify the best-performing design point(s), we derive a simple analytical model for BMC. The proposed BMC method achieves an average throughput acceleration of up to 3.2x over baseline HuggingFace (without SD). Importantly when we apply BMC with SD, it results in an additional speedup of up to 1.39x, over and above the speedup offered by SD. Further, BMC achieves a throughput acceleration of up to 1.36x and 2.29x over state-of-the-art inference servers vLLM and DeepSpeed, respectively. Although the BMC technique is evaluated extensively across different classes of CPUs (desktop and server class), we also evaluate the scheme with GPUs and demonstrate that it works well for GPUs.
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
HomeRobot: Open-Vocabulary Mobile Manipulation
Jun 20, 2023



HomeRobot (noun): An affordable compliant robot that navigates homes and manipulates a wide range of objects in order to complete everyday tasks. Open-Vocabulary Mobile Manipulation (OVMM) is the problem of picking any object in any unseen environment, and placing it in a commanded location. This is a foundational challenge for robots to be useful assistants in human environments, because it involves tackling sub-problems from across robotics: perception, language understanding, navigation, and manipulation are all essential to OVMM. In addition, integration of the solutions to these sub-problems poses its own substantial challenges. To drive research in this area, we introduce the HomeRobot OVMM benchmark, where an agent navigates household environments to grasp novel objects and place them on target receptacles. HomeRobot has two components: a simulation component, which uses a large and diverse curated object set in new, high-quality multi-room home environments; and a real-world component, providing a software stack for the low-cost Hello Robot Stretch to encourage replication of real-world experiments across labs. We implement both reinforcement learning and heuristic (model-based) baselines and show evidence of sim-to-real transfer. Our baselines achieve a 20% success rate in the real world; our experiments identify ways future research work improve performance. See videos on our website: https://ovmm.github.io/.
Housekeep: Tidying Virtual Households using Commonsense Reasoning
May 22, 2022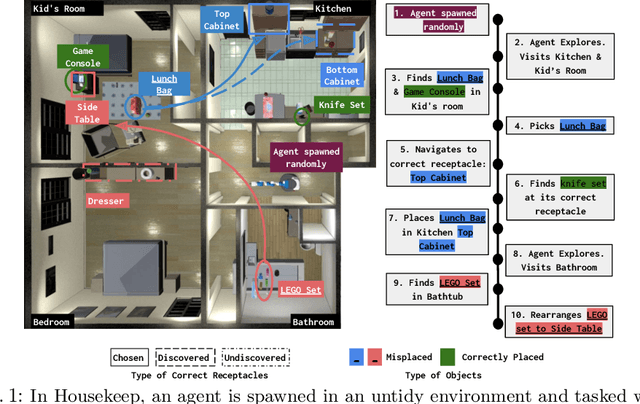

We introduce Housekeep, a benchmark to evaluate commonsense reasoning in the home for embodied AI. In Housekeep, an embodied agent must tidy a house by rearranging misplaced objects without explicit instructions specifying which objects need to be rearranged. Instead, the agent must learn from and is evaluated against human preferences of which objects belong where in a tidy house. Specifically, we collect a dataset of where humans typically place objects in tidy and untidy houses constituting 1799 objects, 268 object categories, 585 placements, and 105 rooms. Next, we propose a modular baseline approach for Housekeep that integrates planning, exploration, and navigation. It leverages a fine-tuned large language model (LLM) trained on an internet text corpus for effective planning. We show that our baseline agent generalizes to rearranging unseen objects in unknown environments. See our webpage for more details: https://yashkant.github.io/housekeep/