 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject and Contact Point Tracking in Demonstrations Using 3D Gaussian Splatting
Nov 05, 2024This paper introduces a method to enhance Interactive Imitation Learning (IIL) by extracting touch interaction points and tracking object movement from video demonstrations. The approach extends current IIL systems by providing robots with detailed knowledge of both where and how to interact with objects, particularly complex articulated ones like doors and drawers. By leveraging cutting-edge techniques such as 3D Gaussian Splatting and FoundationPose for tracking, this method allows robots to better understand and manipulate objects in dynamic environments. The research lays the foundation for more effective task learning and execution in autonomous robotic systems.
Towards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
UniTeam: Open Vocabulary Mobile Manipulation Challenge
Dec 14, 2023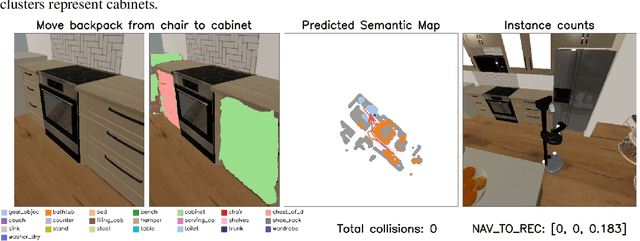
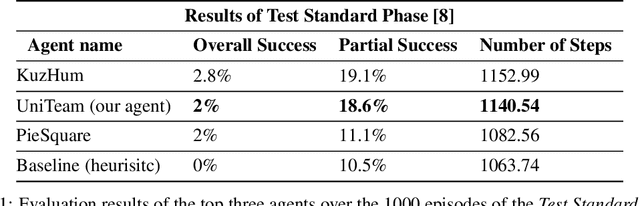

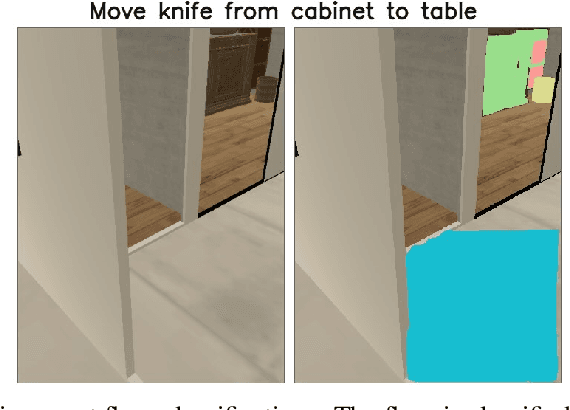
This report introduces our UniTeam agent - an improved baseline for the "HomeRobot: Open Vocabulary Mobile Manipulation" challenge. The challenge poses problems of navigation in unfamiliar environments, manipulation of novel objects, and recognition of open-vocabulary object classes. This challenge aims to facilitate cross-cutting research in embodied AI using recent advances in machine learning, computer vision, natural language, and robotics. In this work, we conducted an exhaustive evaluation of the provided baseline agent; identified deficiencies in perception, navigation, and manipulation skills; and improved the baseline agent's performance. Notably, enhancements were made in perception - minimizing misclassifications; navigation - preventing infinite loop commitments; picking - addressing failures due to changing object visibility; and placing - ensuring accurate positioning for successful object placement.