 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
UniTeam: Open Vocabulary Mobile Manipulation Challenge
Dec 14, 2023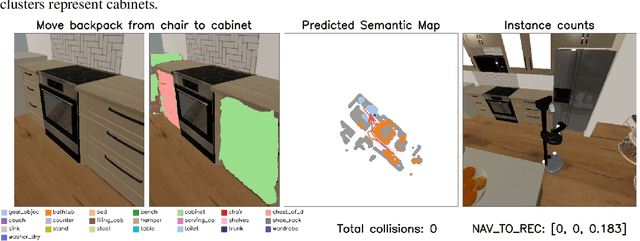
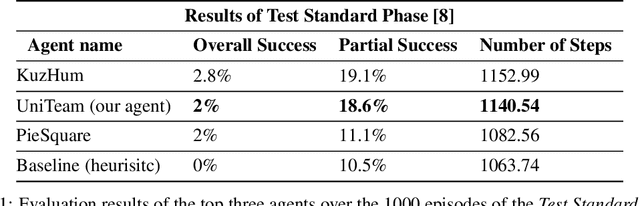

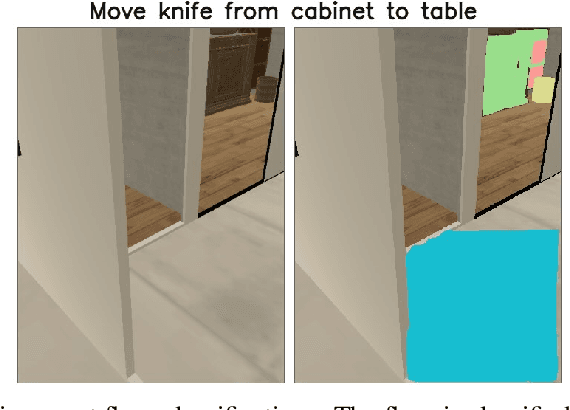
This report introduces our UniTeam agent - an improved baseline for the "HomeRobot: Open Vocabulary Mobile Manipulation" challenge. The challenge poses problems of navigation in unfamiliar environments, manipulation of novel objects, and recognition of open-vocabulary object classes. This challenge aims to facilitate cross-cutting research in embodied AI using recent advances in machine learning, computer vision, natural language, and robotics. In this work, we conducted an exhaustive evaluation of the provided baseline agent; identified deficiencies in perception, navigation, and manipulation skills; and improved the baseline agent's performance. Notably, enhancements were made in perception - minimizing misclassifications; navigation - preventing infinite loop commitments; picking - addressing failures due to changing object visibility; and placing - ensuring accurate positioning for successful object placement.
Development of Human Motion Prediction Strategy using Inception Residual Block
Aug 09, 2021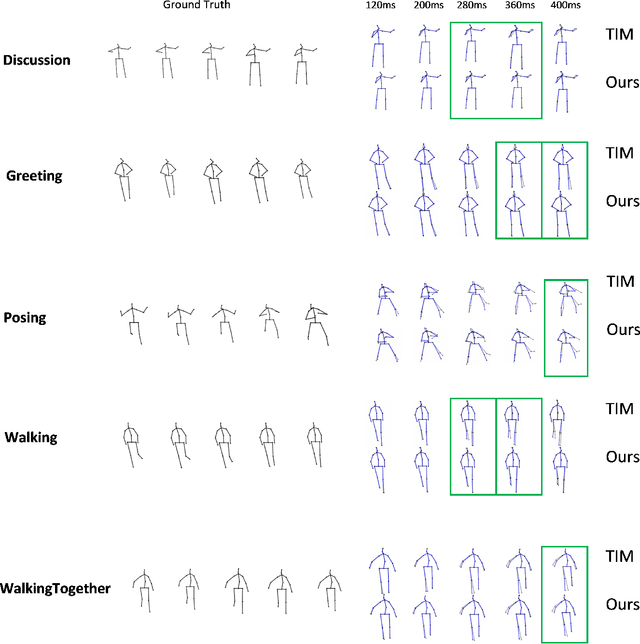
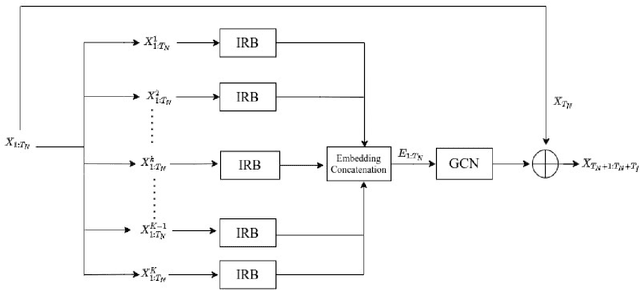
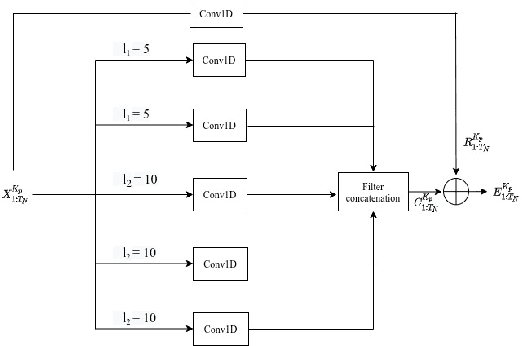
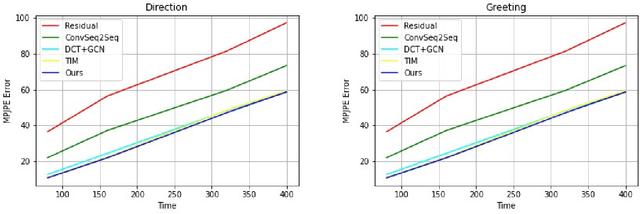
Human Motion Prediction is a crucial task in computer vision and robotics. It has versatile application potentials such as in the area of human-robot interactions, human action tracking for airport security systems, autonomous car navigation, computer gaming to name a few. However, predicting human motion based on past actions is an extremely challenging task due to the difficulties in detecting spatial and temporal features correctly. To detect temporal features in human poses, we propose an Inception Residual Block(IRB), due to its inherent capability of processing multiple kernels to capture salient features. Here, we propose to use multiple 1-D Convolution Neural Network (CNN) with different kernel sizes and input sequence lengths and concatenate them to get proper embedding. As kernels strides over different receptive fields, they detect smaller and bigger salient features at multiple temporal scales. Our main contribution is to propose a residual connection between input and the output of the inception block to have a continuity between the previously observed pose and the next predicted pose. With this proposed architecture, it learns prior knowledge much better about human poses and we achieve much higher prediction accuracy as detailed in the paper. Subsequently, we further propose to feed the output of the inception residual block as an input to the Graph Convolution Neural Network (GCN) due to its better spatial feature learning capability. We perform a parametric analysis for better designing of our model and subsequently, we evaluate our approach on the Human 3.6M dataset and compare our short-term as well as long-term predictions with the state of the art papers, where our model outperforms most of the pose results, the detailed reasons of which have been elaborated in the paper.