 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADAPT: Actively Discovering and Adapting to Preferences for any Task
Apr 05, 2025Assistive agents should be able to perform under-specified long-horizon tasks while respecting user preferences. We introduce Actively Discovering and Adapting to Preferences for any Task (ADAPT) -- a benchmark designed to evaluate agents' ability to adhere to user preferences across various household tasks through active questioning. Next, we propose Reflection-DPO, a novel training approach for adapting large language models (LLMs) to the task of active questioning. Reflection-DPO finetunes a 'student' LLM to follow the actions of a privileged 'teacher' LLM, and optionally ask a question to gather necessary information to better predict the teacher action. We find that prior approaches that use state-of-the-art LLMs fail to sufficiently follow user preferences in ADAPT due to insufficient questioning and poor adherence to elicited preferences. In contrast, Reflection-DPO achieves a higher rate of satisfying user preferences, outperforming a zero-shot chain-of-thought baseline by 6.1% on unseen users.
Grounding Multimodal LLMs to Embodied Agents that Ask for Help with Reinforcement Learning
Apr 02, 2025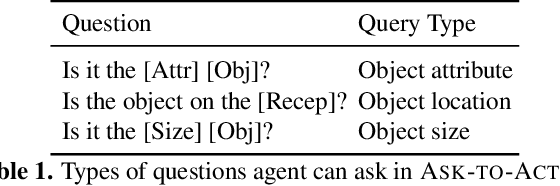
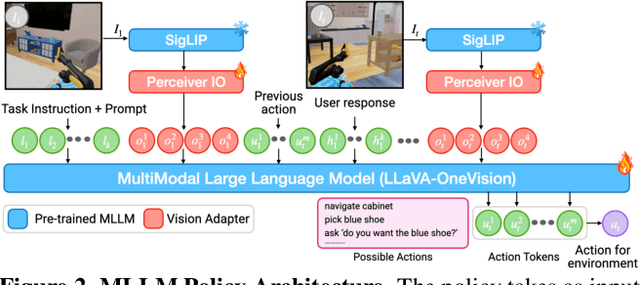
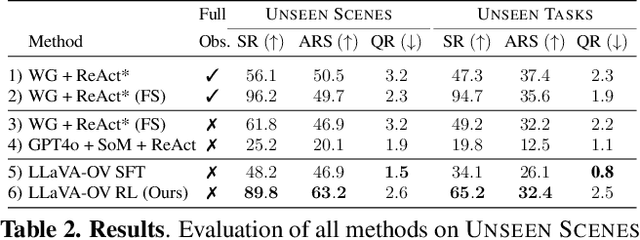
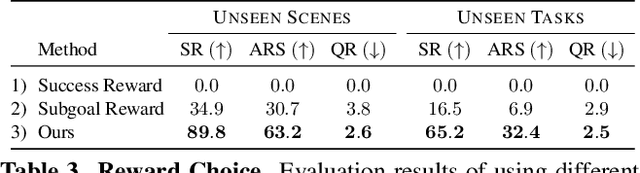
Embodied agents operating in real-world environments must interpret ambiguous and under-specified human instructions. A capable household robot should recognize ambiguity and ask relevant clarification questions to infer the user intent accurately, leading to more effective task execution. To study this problem, we introduce the Ask-to-Act task, where an embodied agent must fetch a specific object instance given an ambiguous instruction in a home environment. The agent must strategically ask minimal, yet relevant, clarification questions to resolve ambiguity while navigating under partial observability. To solve this problem, we propose a novel approach that fine-tunes multimodal large language models (MLLMs) as vision-language-action (VLA) policies using online reinforcement learning (RL) with LLM-generated rewards. Our method eliminates the need for large-scale human demonstrations or manually engineered rewards for training such agents. We benchmark against strong zero-shot baselines, including GPT-4o, and supervised fine-tuned MLLMs, on our task. Our results demonstrate that our RL-finetuned MLLM outperforms all baselines by a significant margin ($19.1$-$40.3\%$), generalizing well to novel scenes and tasks. To the best of our knowledge, this is the first demonstration of adapting MLLMs as VLA agents that can act and ask for help using LLM-generated rewards with online RL.
PARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks
Oct 31, 2024
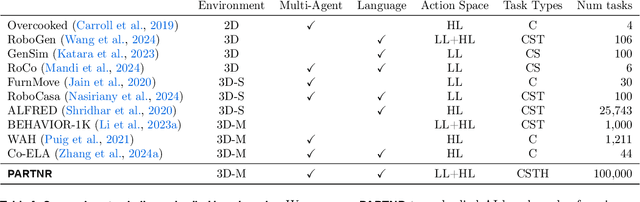

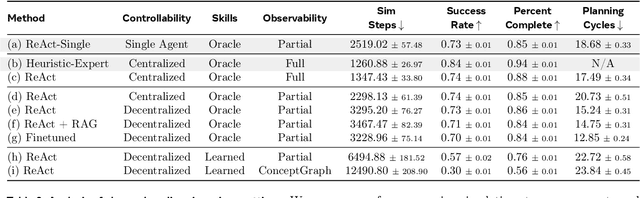
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction.
Human Action Anticipation: A Survey
Oct 17, 2024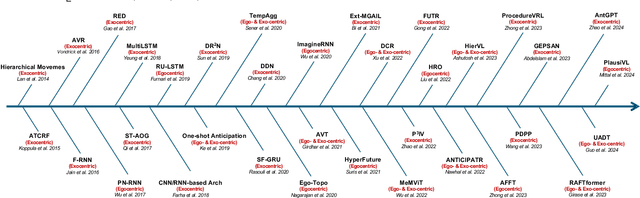
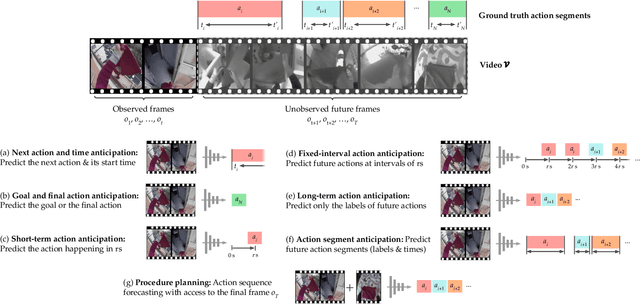
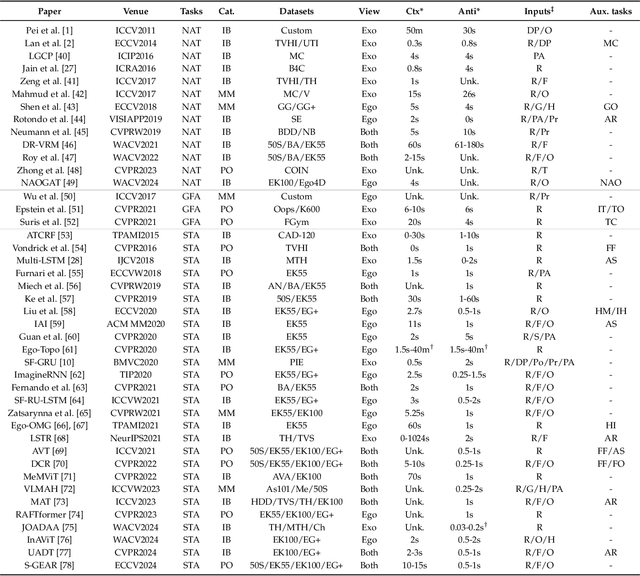
Predicting future human behavior is an increasingly popular topic in computer vision, driven by the interest in applications such as autonomous vehicles, digital assistants and human-robot interactions. The literature on behavior prediction spans various tasks, including action anticipation, activity forecasting, intent prediction, goal prediction, and so on. Our survey aims to tie together this fragmented literature, covering recent technical innovations as well as the development of new large-scale datasets for model training and evaluation. We also summarize the widely-used metrics for different tasks and provide a comprehensive performance comparison of existing approaches on eleven action anticipation datasets. This survey serves as not only a reference for contemporary methodologies in action anticipation, but also a guideline for future research direction of this evolving landscape.
User-in-the-loop Evaluation of Multimodal LLMs for Activity Assistance
Aug 04, 2024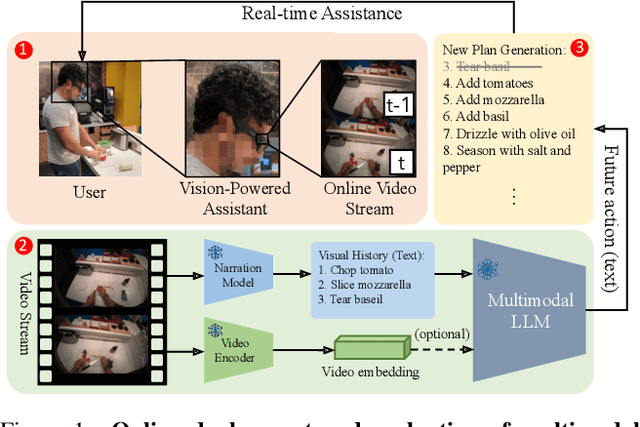

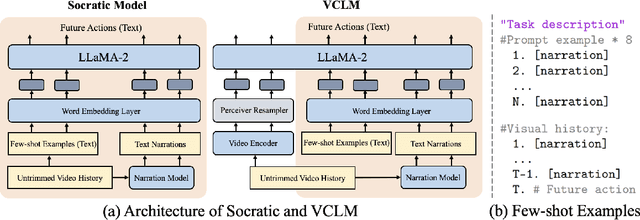

Our research investigates the capability of modern multimodal reasoning models, powered by Large Language Models (LLMs), to facilitate vision-powered assistants for multi-step daily activities. Such assistants must be able to 1) encode relevant visual history from the assistant's sensors, e.g., camera, 2) forecast future actions for accomplishing the activity, and 3) replan based on the user in the loop. To evaluate the first two capabilities, grounding visual history and forecasting in short and long horizons, we conduct benchmarking of two prominent classes of multimodal LLM approaches -- Socratic Models and Vision Conditioned Language Models (VCLMs) on video-based action anticipation tasks using offline datasets. These offline benchmarks, however, do not allow us to close the loop with the user, which is essential to evaluate the replanning capabilities and measure successful activity completion in assistive scenarios. To that end, we conduct a first-of-its-kind user study, with 18 participants performing 3 different multi-step cooking activities while wearing an egocentric observation device called Aria and following assistance from multimodal LLMs. We find that the Socratic approach outperforms VCLMs in both offline and online settings. We further highlight how grounding long visual history, common in activity assistance, remains challenging in current models, especially for VCLMs, and demonstrate that offline metrics do not indicate online performance.
Learning Human Preferences Over Robot Behavior as Soft Planning Constraints
Mar 28, 2024



Preference learning has long been studied in Human-Robot Interaction (HRI) in order to adapt robot behavior to specific user needs and desires. Typically, human preferences are modeled as a scalar function; however, such a formulation confounds critical considerations on how the robot should behave for a given task, with desired -- but not required -- robot behavior. In this work, we distinguish between such required and desired robot behavior by leveraging a planning framework. Specifically, we propose a novel problem formulation for preference learning in HRI where various types of human preferences are encoded as soft planning constraints. Then, we explore a data-driven method to enable a robot to infer preferences by querying users, which we instantiate in rearrangement tasks in the Habitat 2.0 simulator. We show that the proposed approach is promising at inferring three types of preferences even under varying levels of noise in simulated user choices between potential robot behaviors. Our contributions open up doors to adaptable planning-based robot behavior in the future.
Human-Centered Planning
Nov 08, 2023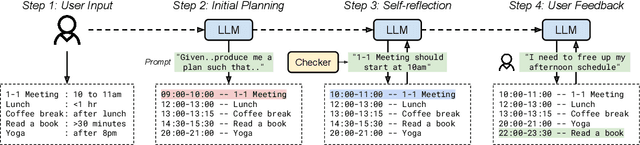
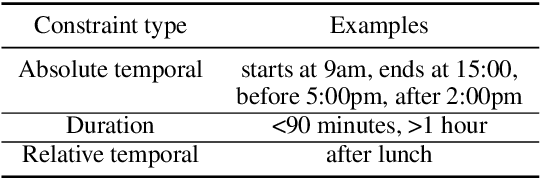
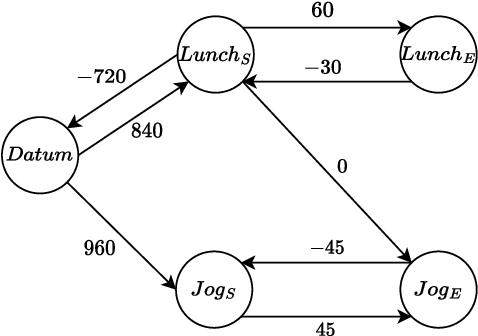
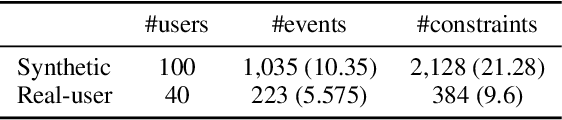
LLMs have recently made impressive inroads on tasks whose output is structured, such as coding, robotic planning and querying databases. The vision of creating AI-powered personal assistants also involves creating structured outputs, such as a plan for one's day, or for an overseas trip. Here, since the plan is executed by a human, the output doesn't have to satisfy strict syntactic constraints. A useful assistant should also be able to incorporate vague constraints specified by the user in natural language. This makes LLMs an attractive option for planning. We consider the problem of planning one's day. We develop an LLM-based planner (LLMPlan) extended with the ability to self-reflect on its output and a symbolic planner (SymPlan) with the ability to translate text constraints into a symbolic representation. Despite no formal specification of constraints, we find that LLMPlan performs explicit constraint satisfaction akin to the traditional symbolic planners on average (2% performance difference), while retaining the reasoning of implicit requirements. Consequently, LLM-based planners outperform their symbolic counterparts in user satisfaction (70.5% vs. 40.4%) during interactive evaluation with 40 users.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.
Adaptive Coordination in Social Embodied Rearrangement
May 31, 2023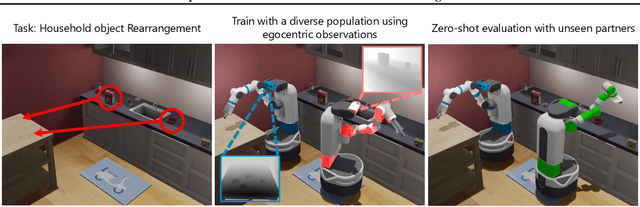
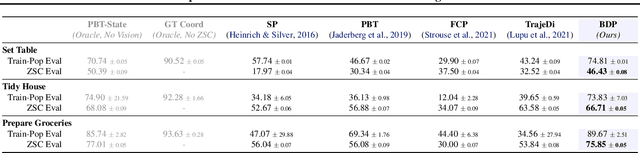
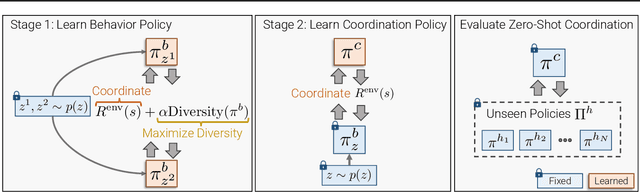
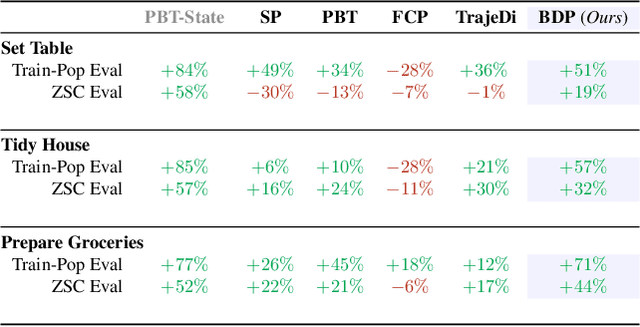
We present the task of "Social Rearrangement", consisting of cooperative everyday tasks like setting up the dinner table, tidying a house or unpacking groceries in a simulated multi-agent environment. In Social Rearrangement, two robots coordinate to complete a long-horizon task, using onboard sensing and egocentric observations, and no privileged information about the environment. We study zero-shot coordination (ZSC) in this task, where an agent collaborates with a new partner, emulating a scenario where a robot collaborates with a new human partner. Prior ZSC approaches struggle to generalize in our complex and visually rich setting, and on further analysis, we find that they fail to generate diverse coordination behaviors at training time. To counter this, we propose Behavior Diversity Play (BDP), a novel ZSC approach that encourages diversity through a discriminability objective. Our results demonstrate that BDP learns adaptive agents that can tackle visual coordination, and zero-shot generalize to new partners in unseen environments, achieving 35% higher success and 32% higher efficiency compared to baselines.
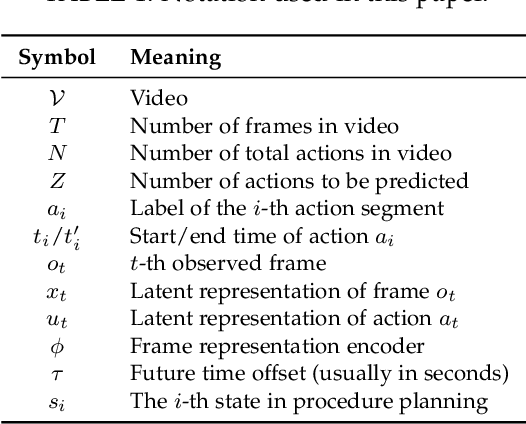
Pretrained Language Models as Visual Planners for Human Assistance
Apr 27, 2023To make progress towards multi-modal AI assistants which can guide users to achieve complex multi-step goals, we propose the task of Visual Planning for Assistance (VPA). Given a goal briefly described in natural language, e.g., "make a shelf", and a video of the user's progress so far, the aim of VPA is to obtain a plan, i.e., a sequence of actions such as "sand shelf", "paint shelf", etc., to achieve the goal. This requires assessing the user's progress from the untrimmed video, and relating it to the requirements of underlying goal, i.e., relevance of actions and ordering dependencies amongst them. Consequently, this requires handling long video history, and arbitrarily complex action dependencies. To address these challenges, we decompose VPA into video action segmentation and forecasting. We formulate the forecasting step as a multi-modal sequence modeling problem and present Visual Language Model based Planner (VLaMP), which leverages pre-trained LMs as the sequence model. We demonstrate that VLaMP performs significantly better than baselines w.r.t all metrics that evaluate the generated plan. Moreover, through extensive ablations, we also isolate the value of language pre-training, visual observations, and goal information on the performance. We will release our data, model, and code to enable future research on visual planning for assistance.