 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Causal Approach to Predicting and Improving Human Perceptions of Social Navigation Robots
Mar 11, 2026As mobile robots are increasingly deployed in human environments, enabling them to predict how people perceive them is critical for socially adaptable navigation. Predicting perceptions is challenging for two main reasons: (1) HRI prediction models must learn from limited data, and (2) the obtained models must be interpretable to enable safe and effective interactions. Interpretability is particularly important when a robot is perceived as incompetent (e.g., when the robot suddenly stops or rotates away from the goal), as it allows the robot to explain its reasoning and identify controllable factors to improve performance, requiring causal rather than associative reasoning. To address these challenges, we propose a Causal Bayesian Network designed to predict how people perceive a mobile robot's competence and how they interpret its intent during navigation. Additionally, we introduce a novel method to improve perceived robot competence employing a combinatorial search, guided by the proposed causal model, to identify better navigation behaviors. Our method enhances interpretability and generates counterfactual robot motions while achieving comparable or superior predictive performance to state-of-the-art methods, reaching an F1-score of 0.78 and 0.75 for competence and intention on a binary scale. To further assess our method's ability to improve the perceived robot competence, we conducted an online evaluation in which users rated robot behaviors on a 5-point Likert scale. Our method statistically significantly increased the perceived competence of low-competent robot behavior by 83%.
Few-Shot Inference of Human Perceptions of Robot Performance in Social Navigation Scenarios
Dec 17, 2025Understanding how humans evaluate robot behavior during human-robot interactions is crucial for developing socially aware robots that behave according to human expectations. While the traditional approach to capturing these evaluations is to conduct a user study, recent work has proposed utilizing machine learning instead. However, existing data-driven methods require large amounts of labeled data, which limits their use in practice. To address this gap, we propose leveraging the few-shot learning capabilities of Large Language Models (LLMs) to improve how well a robot can predict a user's perception of its performance, and study this idea experimentally in social navigation tasks. To this end, we extend the SEAN TOGETHER dataset with additional real-world human-robot navigation episodes and participant feedback. Using this augmented dataset, we evaluate the ability of several LLMs to predict human perceptions of robot performance from a small number of in-context examples, based on observed spatio-temporal cues of the robot and surrounding human motion. Our results demonstrate that LLMs can match or exceed the performance of traditional supervised learning models while requiring an order of magnitude fewer labeled instances. We further show that prediction performance can improve with more in-context examples, confirming the scalability of our approach. Additionally, we investigate what kind of sensor-based information an LLM relies on to make these inferences by conducting an ablation study on the input features considered for performance prediction. Finally, we explore the novel application of personalized examples for in-context learning, i.e., drawn from the same user being evaluated, finding that they further enhance prediction accuracy. This work paves the path to improving robot behavior in a scalable manner through user-centered feedback.
Aligning Multiclass Neural Network Classifier Criterion with Task Performance via $F_β$-Score
May 31, 2024



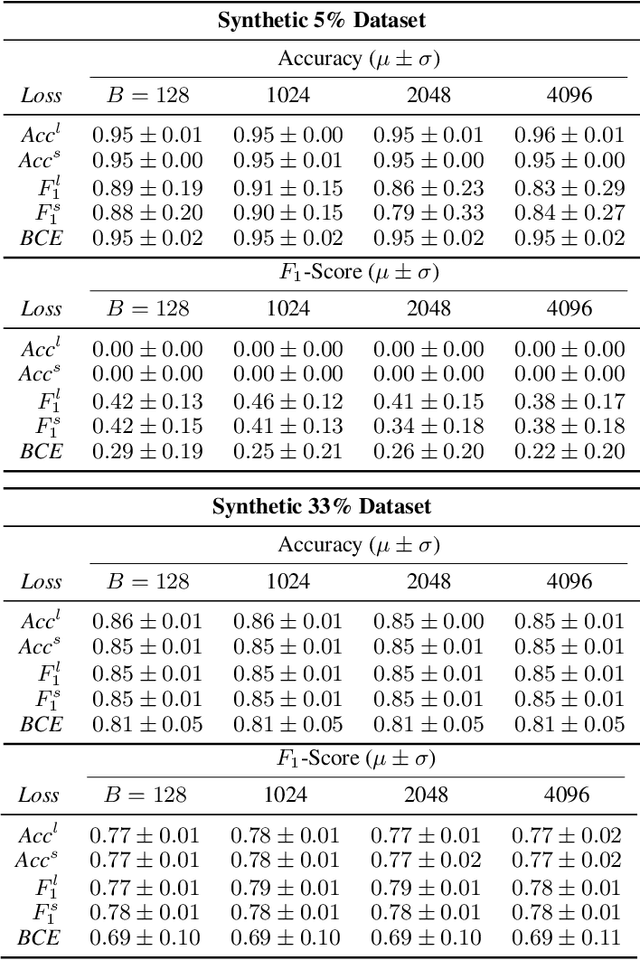
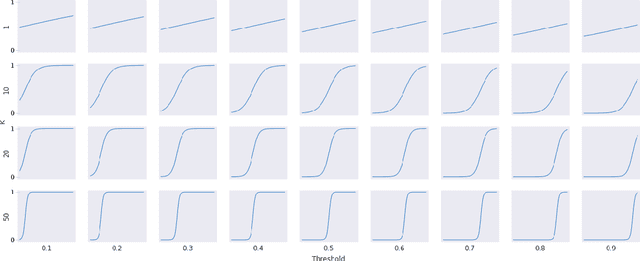
Multiclass neural network classifiers are typically trained using cross-entropy loss. Following training, the performance of this same neural network is evaluated using an application-specific metric based on the multiclass confusion matrix, such as the Macro $F_\beta$-Score. It is questionable whether the use of cross-entropy will yield a classifier that aligns with the intended application-specific performance criteria, particularly in scenarios where there is a need to emphasize one aspect of classifier performance. For example, if greater precision is preferred over recall, the $\beta$ value in the $F_\beta$ evaluation metric can be adjusted accordingly, but the cross-entropy objective remains unaware of this preference during training. We propose a method that addresses this training-evaluation gap for multiclass neural network classifiers such that users can train these models informed by the desired final $F_\beta$-Score. Following prior work in binary classification, we utilize the concepts of the soft-set confusion matrices and a piecewise-linear approximation of the Heaviside step function. Our method extends the $2 \times 2$ binary soft-set confusion matrix to a multiclass $d \times d$ confusion matrix and proposes dynamic adaptation of the threshold value $\tau$, which parameterizes the piecewise-linear Heaviside approximation during run-time. We present a theoretical analysis that shows that our method can be used to optimize for a soft-set based approximation of Macro-$F_\beta$ that is a consistent estimator of Macro-$F_\beta$, and our extensive experiments show the practical effectiveness of our approach.
Learning Human Preferences Over Robot Behavior as Soft Planning Constraints
Mar 28, 2024



Preference learning has long been studied in Human-Robot Interaction (HRI) in order to adapt robot behavior to specific user needs and desires. Typically, human preferences are modeled as a scalar function; however, such a formulation confounds critical considerations on how the robot should behave for a given task, with desired -- but not required -- robot behavior. In this work, we distinguish between such required and desired robot behavior by leveraging a planning framework. Specifically, we propose a novel problem formulation for preference learning in HRI where various types of human preferences are encoded as soft planning constraints. Then, we explore a data-driven method to enable a robot to infer preferences by querying users, which we instantiate in rearrangement tasks in the Habitat 2.0 simulator. We show that the proposed approach is promising at inferring three types of preferences even under varying levels of noise in simulated user choices between potential robot behaviors. Our contributions open up doors to adaptable planning-based robot behavior in the future.
Towards Inferring Users' Impressions of Robot Performance in Navigation Scenarios
Oct 17, 2023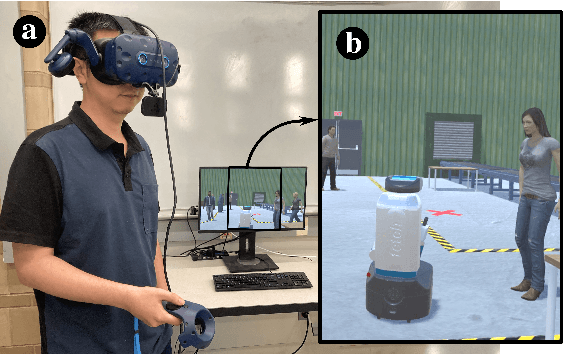
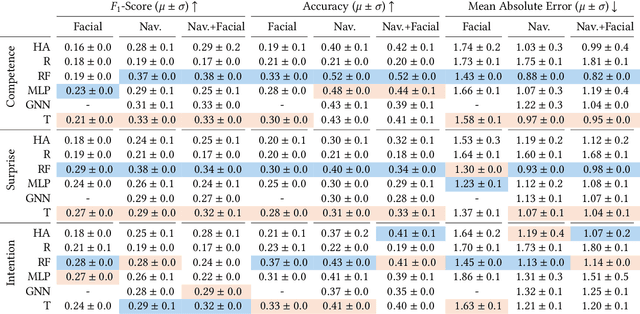
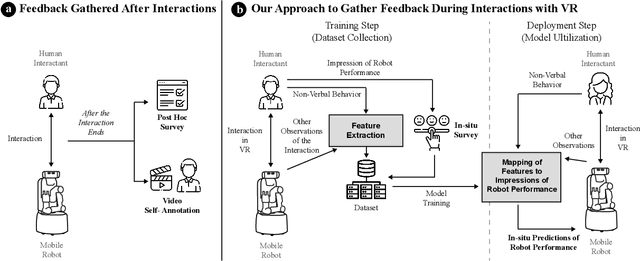
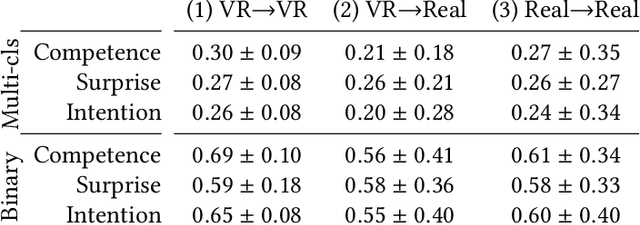
Human impressions of robot performance are often measured through surveys. As a more scalable and cost-effective alternative, we study the possibility of predicting people's impressions of robot behavior using non-verbal behavioral cues and machine learning techniques. To this end, we first contribute the SEAN TOGETHER Dataset consisting of observations of an interaction between a person and a mobile robot in a Virtual Reality simulation, together with impressions of robot performance provided by users on a 5-point scale. Second, we contribute analyses of how well humans and supervised learning techniques can predict perceived robot performance based on different combinations of observation types (e.g., facial, spatial, and map features). Our results show that facial expressions alone provide useful information about human impressions of robot performance; but in the navigation scenarios we tested, spatial features are the most critical piece of information for this inference task. Also, when evaluating results as binary classification (rather than multiclass classification), the F1-Score of human predictions and machine learning models more than doubles, showing that both are better at telling the directionality of robot performance than predicting exact performance ratings. Based on our findings, we provide guidelines for implementing these predictions models in real-world navigation scenarios.
Principles and Guidelines for Evaluating Social Robot Navigation Algorithms
Jun 29, 2023



A major challenge to deploying robots widely is navigation in human-populated environments, commonly referred to as social robot navigation. While the field of social navigation has advanced tremendously in recent years, the fair evaluation of algorithms that tackle social navigation remains hard because it involves not just robotic agents moving in static environments but also dynamic human agents and their perceptions of the appropriateness of robot behavior. In contrast, clear, repeatable, and accessible benchmarks have accelerated progress in fields like computer vision, natural language processing and traditional robot navigation by enabling researchers to fairly compare algorithms, revealing limitations of existing solutions and illuminating promising new directions. We believe the same approach can benefit social navigation. In this paper, we pave the road towards common, widely accessible, and repeatable benchmarking criteria to evaluate social robot navigation. Our contributions include (a) a definition of a socially navigating robot as one that respects the principles of safety, comfort, legibility, politeness, social competency, agent understanding, proactivity, and responsiveness to context, (b) guidelines for the use of metrics, development of scenarios, benchmarks, datasets, and simulators to evaluate social navigation, and (c) a design of a social navigation metrics framework to make it easier to compare results from different simulators, robots and datasets.
Shutter, the Robot Photographer: Leveraging Behavior Trees for Public, In-the-Wild Human-Robot Interactions
Feb 01, 2023

Deploying interactive systems in-the-wild requires adaptability to situations not encountered in lab environments. Our work details our experience about the impact of architecture choice on behavior reusability and reactivity while deploying a public interactive system. In particular, we introduce Shutter, a robot photographer and a platform for public interaction. In designing Shutter's architecture, we focused on adaptability for in-the-wild deployment, while developing a reusable platform to facilitate future research in public human-robot interaction. We find that behavior trees allow reactivity, especially in group settings, and encourage designing reusable behaviors.
SEAN-EP: A Platform for Collecting Human Feedback for Social Robot Navigation at Scale
Dec 22, 2020
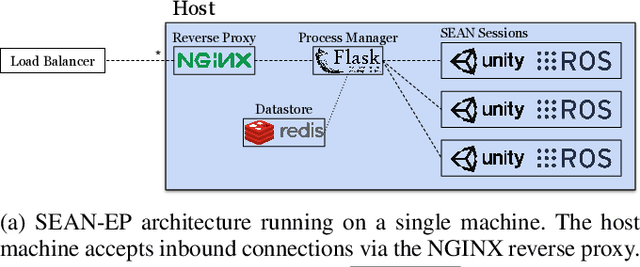
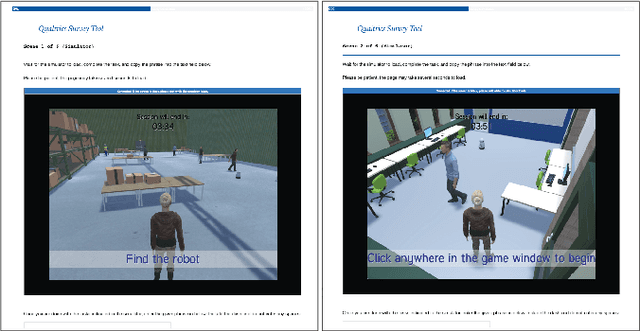
We introduce the SEAN Experimental Platform (SEAN-EP), an open-source system that allows roboticists to gather human feedback for social robot navigation at scale using online interactive simulations. Through SEAN-EP, remote users can control the motion of a human avatar via their web browser and interact with a virtual robot controlled through the Robot Operating System. Heavy computation in SEAN-EP is delegated to cloud servers such that users do not need specialized hardware to take part in the simulations. We validated SEAN-EP and its usability through an online survey, and compared the data collected from this survey with a similar video survey. Our results suggest that human perceptions of robots may differ based on whether they interact with the robots in simulation or observe them in videos. Also, our study suggests that people may perceive the surveys with interactive simulations as less mentally demanding than video surveys.
SEAN: Social Environment for Autonomous Navigation
Sep 09, 2020
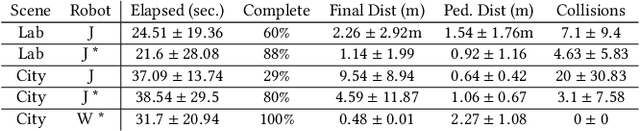
Social navigation research is performed on a variety of robotic platforms, scenarios, and environments. Making comparisons between navigation algorithms is challenging because of the effort involved in building these systems and the diversity of platforms used by the community; nonetheless, evaluation is critical to understanding progress in the field. In a step towards reproducible evaluation of social navigation algorithms, we propose the Social Environment for Autonomous Navigation (SEAN). SEAN is a high visual fidelity, open source, and extensible social navigation simulation platform which includes a toolkit for evaluation of navigation algorithms. We demonstrate SEAN and its evaluation toolkit in two environments with dynamic pedestrians and using two different robots.
A Heaviside Function Approximation for Neural Network Binary Classification
Sep 02, 2020
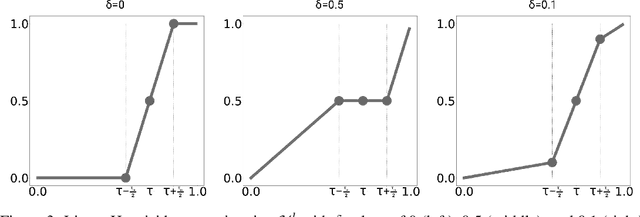
Neural network binary classifiers are often evaluated on metrics like accuracy and $F_1$-Score, which are based on confusion matrix values (True Positives, False Positives, False Negatives, and True Negatives). However, these classifiers are commonly trained with a different loss, e.g. log loss. While it is preferable to perform training on the same loss as the evaluation metric, this is difficult in the case of confusion matrix based metrics because set membership is a step function without a derivative useful for backpropagation. To address this challenge, we propose an approximation of the step function that adheres to the properties necessary for effective training of binary networks using confusion matrix based metrics. This approach allows for end-to-end training of binary deep neural classifiers via batch gradient descent. We demonstrate the flexibility of this approach in several applications with varying levels of class imbalance. We also demonstrate how the approximation allows balancing between precision and recall in the appropriate ratio for the task at hand.