 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Inference of Human Perceptions of Robot Performance in Social Navigation Scenarios
Dec 17, 2025Understanding how humans evaluate robot behavior during human-robot interactions is crucial for developing socially aware robots that behave according to human expectations. While the traditional approach to capturing these evaluations is to conduct a user study, recent work has proposed utilizing machine learning instead. However, existing data-driven methods require large amounts of labeled data, which limits their use in practice. To address this gap, we propose leveraging the few-shot learning capabilities of Large Language Models (LLMs) to improve how well a robot can predict a user's perception of its performance, and study this idea experimentally in social navigation tasks. To this end, we extend the SEAN TOGETHER dataset with additional real-world human-robot navigation episodes and participant feedback. Using this augmented dataset, we evaluate the ability of several LLMs to predict human perceptions of robot performance from a small number of in-context examples, based on observed spatio-temporal cues of the robot and surrounding human motion. Our results demonstrate that LLMs can match or exceed the performance of traditional supervised learning models while requiring an order of magnitude fewer labeled instances. We further show that prediction performance can improve with more in-context examples, confirming the scalability of our approach. Additionally, we investigate what kind of sensor-based information an LLM relies on to make these inferences by conducting an ablation study on the input features considered for performance prediction. Finally, we explore the novel application of personalized examples for in-context learning, i.e., drawn from the same user being evaluated, finding that they further enhance prediction accuracy. This work paves the path to improving robot behavior in a scalable manner through user-centered feedback.
REACT: Two Datasets for Analyzing Both Human Reactions and Evaluative Feedback to Robots Over Time
Jan 31, 2024


Recent work in Human-Robot Interaction (HRI) has shown that robots can leverage implicit communicative signals from users to understand how they are being perceived during interactions. For example, these signals can be gaze patterns, facial expressions, or body motions that reflect internal human states. To facilitate future research in this direction, we contribute the REACT database, a collection of two datasets of human-robot interactions that display users' natural reactions to robots during a collaborative game and a photography scenario. Further, we analyze the datasets to show that interaction history is an important factor that can influence human reactions to robots. As a result, we believe that future models for interpreting implicit feedback in HRI should explicitly account for this history. REACT opens up doors to this possibility in the future.
Towards Inferring Users' Impressions of Robot Performance in Navigation Scenarios
Oct 17, 2023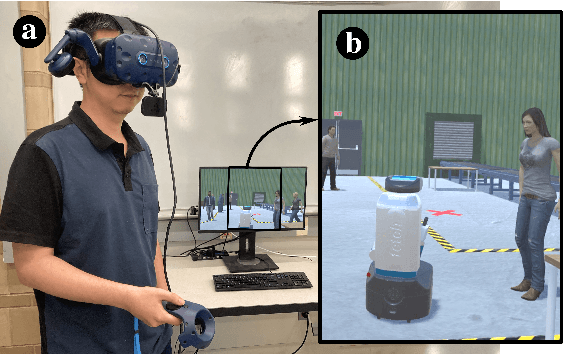
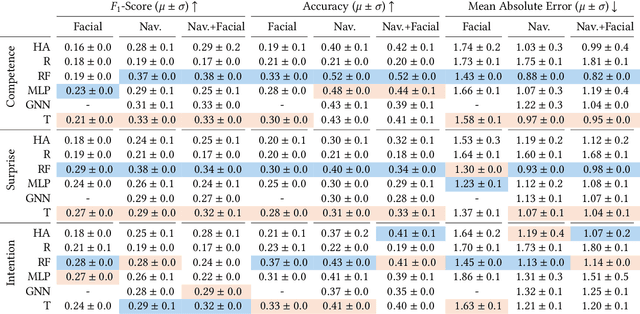
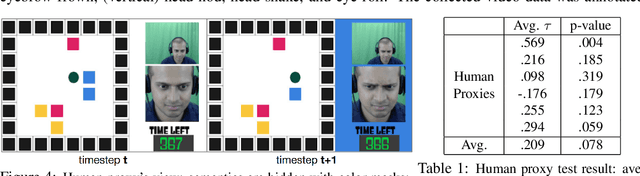
Human impressions of robot performance are often measured through surveys. As a more scalable and cost-effective alternative, we study the possibility of predicting people's impressions of robot behavior using non-verbal behavioral cues and machine learning techniques. To this end, we first contribute the SEAN TOGETHER Dataset consisting of observations of an interaction between a person and a mobile robot in a Virtual Reality simulation, together with impressions of robot performance provided by users on a 5-point scale. Second, we contribute analyses of how well humans and supervised learning techniques can predict perceived robot performance based on different combinations of observation types (e.g., facial, spatial, and map features). Our results show that facial expressions alone provide useful information about human impressions of robot performance; but in the navigation scenarios we tested, spatial features are the most critical piece of information for this inference task. Also, when evaluating results as binary classification (rather than multiclass classification), the F1-Score of human predictions and machine learning models more than doubles, showing that both are better at telling the directionality of robot performance than predicting exact performance ratings. Based on our findings, we provide guidelines for implementing these predictions models in real-world navigation scenarios.
The EMPATHIC Framework for Task Learning from Implicit Human Feedback
Sep 28, 2020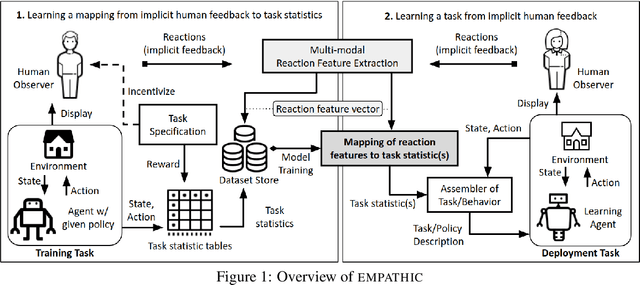
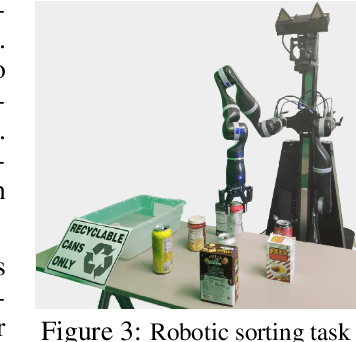
Reactions such as gestures, facial expressions, and vocalizations are an abundant, naturally occurring channel of information that humans provide during interactions. A robot or other agent could leverage an understanding of such implicit human feedback to improve its task performance at no cost to the human. This approach contrasts with common agent teaching methods based on demonstrations, critiques, or other guidance that need to be attentively and intentionally provided. In this paper, we first define the general problem of learning from implicit human feedback and then propose to address this problem through a novel data-driven framework, EMPATHIC. This two-stage method consists of (1) mapping implicit human feedback to relevant task statistics such as rewards, optimality, and advantage; and (2) using such a mapping to learn a task. We instantiate the first stage and three second-stage evaluations of the learned mapping. To do so, we collect a dataset of human facial reactions while participants observe an agent execute a sub-optimal policy for a prescribed training task. We train a deep neural network on this data and demonstrate its ability to (1) infer relative reward ranking of events in the training task from prerecorded human facial reactions; (2) improve the policy of an agent in the training task using live human facial reactions; and (3) transfer to a novel domain in which it evaluates robot manipulation trajectories.