 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShutter, the Robot Photographer: Leveraging Behavior Trees for Public, In-the-Wild Human-Robot Interactions
Feb 01, 2023

Deploying interactive systems in-the-wild requires adaptability to situations not encountered in lab environments. Our work details our experience about the impact of architecture choice on behavior reusability and reactivity while deploying a public interactive system. In particular, we introduce Shutter, a robot photographer and a platform for public interaction. In designing Shutter's architecture, we focused on adaptability for in-the-wild deployment, while developing a reusable platform to facilitate future research in public human-robot interaction. We find that behavior trees allow reactivity, especially in group settings, and encourage designing reusable behaviors.
Bayesian causal inference via probabilistic program synthesis
Oct 30, 2019
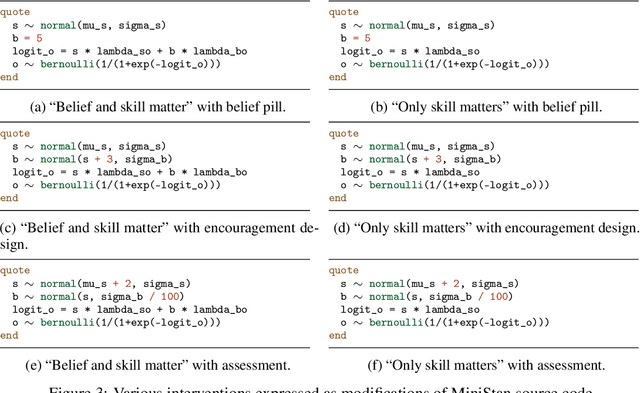


Causal inference can be formalized as Bayesian inference that combines a prior distribution over causal models and likelihoods that account for both observations and interventions. We show that it is possible to implement this approach using a sufficiently expressive probabilistic programming language. Priors are represented using probabilistic programs that generate source code in a domain specific language. Interventions are represented using probabilistic programs that edit this source code to modify the original generative process. This approach makes it straightforward to incorporate data from atomic interventions, as well as shift interventions, variance-scaling interventions, and other interventions that modify causal structure. This approach also enables the use of general-purpose inference machinery for probabilistic programs to infer probable causal structures and parameters from data. This abstract describes a prototype of this approach in the Gen probabilistic programming language.