 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human Preferences Over Robot Behavior as Soft Planning Constraints
Mar 28, 2024



Preference learning has long been studied in Human-Robot Interaction (HRI) in order to adapt robot behavior to specific user needs and desires. Typically, human preferences are modeled as a scalar function; however, such a formulation confounds critical considerations on how the robot should behave for a given task, with desired -- but not required -- robot behavior. In this work, we distinguish between such required and desired robot behavior by leveraging a planning framework. Specifically, we propose a novel problem formulation for preference learning in HRI where various types of human preferences are encoded as soft planning constraints. Then, we explore a data-driven method to enable a robot to infer preferences by querying users, which we instantiate in rearrangement tasks in the Habitat 2.0 simulator. We show that the proposed approach is promising at inferring three types of preferences even under varying levels of noise in simulated user choices between potential robot behaviors. Our contributions open up doors to adaptable planning-based robot behavior in the future.
Visual Relationships as Functions: Enabling Few-Shot Scene Graph Prediction
Jun 14, 2019


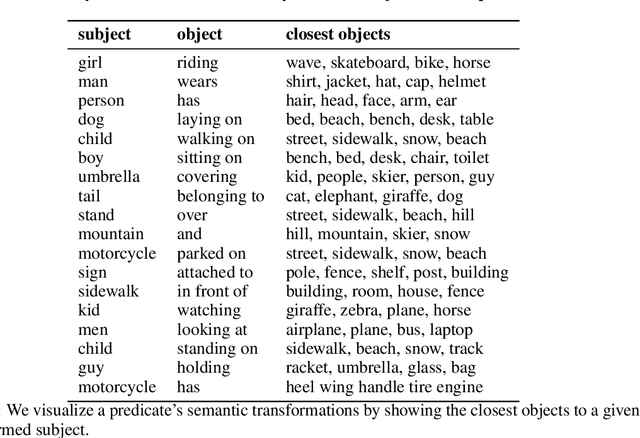
Scene graph prediction --- classifying the set of objects and predicates in a visual scene --- requires substantial training data. The long-tailed distribution of relationships can be an obstacle for such approaches, however, as they can only be trained on the small set of predicates that carry sufficient labels. We introduce the first scene graph prediction model that supports few-shot learning of predicates, enabling scene graph approaches to generalize to a set of new predicates. First, we introduce a new model of predicates as functions that operate on object features or image locations. Next, we define a scene graph model where these functions are trained as message passing protocols within a new graph convolution framework. We train the framework with a frequently occurring set of predicates and show that our approach outperforms those that use the same amount of supervision by 1.78 at recall@50 and performs on par with other scene graph models. Next, we extract object representations generated by the trained predicate functions to train few-shot predicate classifiers on rare predicates with as few as 1 labeled example. When compared to strong baselines like transfer learning from existing state-of-the-art representations, we show improved 5-shot performance by 4.16 recall@1. Finally, we show that our predicate functions generate interpretable visualizations, enabling the first interpretable scene graph model.
HYPE: Human eYe Perceptual Evaluation of Generative Models
Apr 24, 2019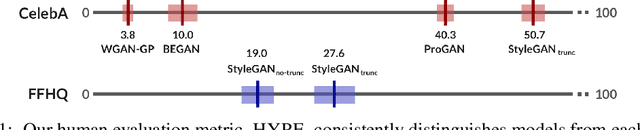



Generative models often use human evaluations to determine and justify progress. Unfortunately, existing human evaluation methods are ad-hoc: there is currently no standardized, validated evaluation that: (1) measures perceptual fidelity, (2) is reliable, (3) separates models into clear rank order, and (4) ensures high-quality measurement without intractable cost. In response, we construct Human-eYe Perceptual Evaluation (HYPE), a human metric that is (1) grounded in psychophysics research in perception, (2) reliable across different sets of randomly sampled outputs from a model, (3) results in separable model performances, and (4) efficient in cost and time. We introduce two methods. The first, HYPE-Time, measures visual perception under adaptive time constraints to determine the minimum length of time (e.g., 250ms) that model output such as a generated face needs to be visible for people to distinguish it as real or fake. The second, HYPE-Infinity, measures human error rate on fake and real images with no time constraints, maintaining stability and drastically reducing time and cost. We test HYPE across four state-of-the-art generative adversarial networks (GANs) on unconditional image generation using two datasets, the popular CelebA and the newer higher-resolution FFHQ, and two sampling techniques of model outputs. By simulating HYPE's evaluation multiple times, we demonstrate consistent ranking of different models, identifying StyleGAN with truncation trick sampling (27.6% HYPE-Infinity deception rate, with roughly one quarter of images being misclassified by humans) as superior to StyleGAN without truncation (19.0%) on FFHQ. See https://hype.stanford.edu for details.