 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADAPT: Actively Discovering and Adapting to Preferences for any Task
Apr 05, 2025Assistive agents should be able to perform under-specified long-horizon tasks while respecting user preferences. We introduce Actively Discovering and Adapting to Preferences for any Task (ADAPT) -- a benchmark designed to evaluate agents' ability to adhere to user preferences across various household tasks through active questioning. Next, we propose Reflection-DPO, a novel training approach for adapting large language models (LLMs) to the task of active questioning. Reflection-DPO finetunes a 'student' LLM to follow the actions of a privileged 'teacher' LLM, and optionally ask a question to gather necessary information to better predict the teacher action. We find that prior approaches that use state-of-the-art LLMs fail to sufficiently follow user preferences in ADAPT due to insufficient questioning and poor adherence to elicited preferences. In contrast, Reflection-DPO achieves a higher rate of satisfying user preferences, outperforming a zero-shot chain-of-thought baseline by 6.1% on unseen users.
RobotMover: Learning to Move Large Objects by Imitating the Dynamic Chain
Feb 07, 2025Moving large objects, such as furniture, is a critical capability for robots operating in human environments. This task presents significant challenges due to two key factors: the need to synchronize whole-body movements to prevent collisions between the robot and the object, and the under-actuated dynamics arising from the substantial size and weight of the objects. These challenges also complicate performing these tasks via teleoperation. In this work, we introduce \method, a generalizable learning framework that leverages human-object interaction demonstrations to enable robots to perform large object manipulation tasks. Central to our approach is the Dynamic Chain, a novel representation that abstracts human-object interactions so that they can be retargeted to robotic morphologies. The Dynamic Chain is a spatial descriptor connecting the human and object root position via a chain of nodes, which encode the position and velocity of different interaction keypoints. We train policies in simulation using Dynamic-Chain-based imitation rewards and domain randomization, enabling zero-shot transfer to real-world settings without fine-tuning. Our approach outperforms both learning-based methods and teleoperation baselines across six evaluation metrics when tested on three distinct object types, both in simulation and on physical hardware. Furthermore, we successfully apply the learned policies to real-world tasks, such as moving a trash cart and rearranging chairs.
PARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks
Oct 31, 2024
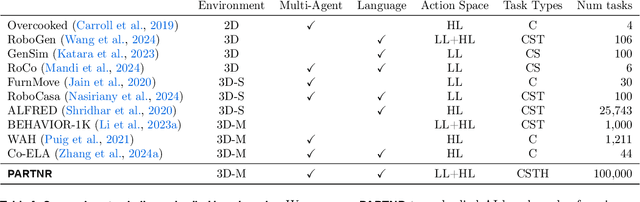

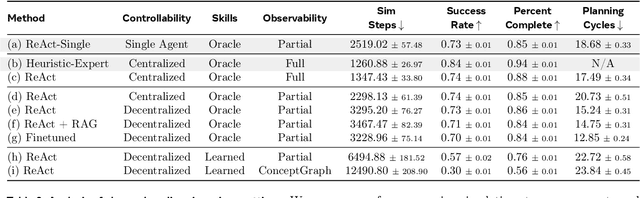
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction.
Situated Instruction Following
Jul 15, 2024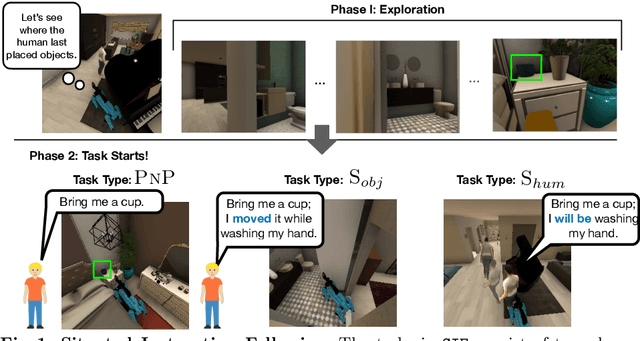
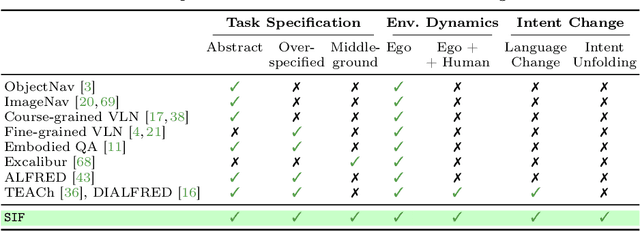
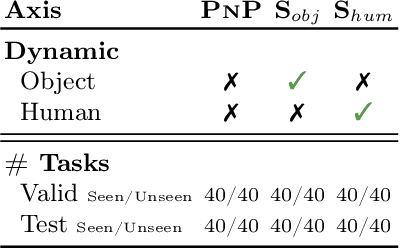
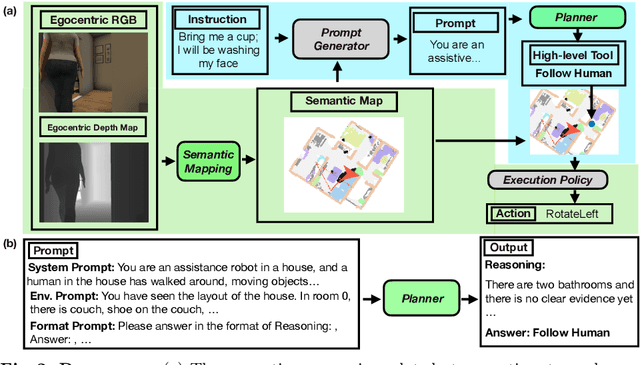
Language is never spoken in a vacuum. It is expressed, comprehended, and contextualized within the holistic backdrop of the speaker's history, actions, and environment. Since humans are used to communicating efficiently with situated language, the practicality of robotic assistants hinge on their ability to understand and act upon implicit and situated instructions. In traditional instruction following paradigms, the agent acts alone in an empty house, leading to language use that is both simplified and artificially "complete." In contrast, we propose situated instruction following, which embraces the inherent underspecification and ambiguity of real-world communication with the physical presence of a human speaker. The meaning of situated instructions naturally unfold through the past actions and the expected future behaviors of the human involved. Specifically, within our settings we have instructions that (1) are ambiguously specified, (2) have temporally evolving intent, (3) can be interpreted more precisely with the agent's dynamic actions. Our experiments indicate that state-of-the-art Embodied Instruction Following (EIF) models lack holistic understanding of situated human intention.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.
Skill Transformer: A Monolithic Policy for Mobile Manipulation
Aug 19, 2023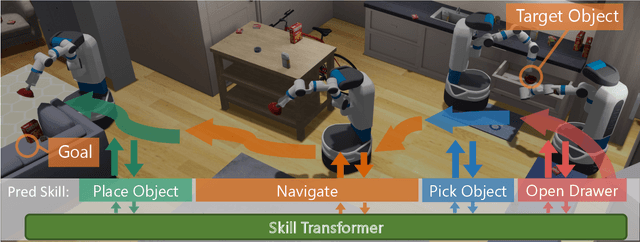
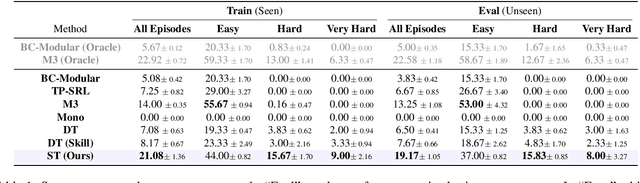
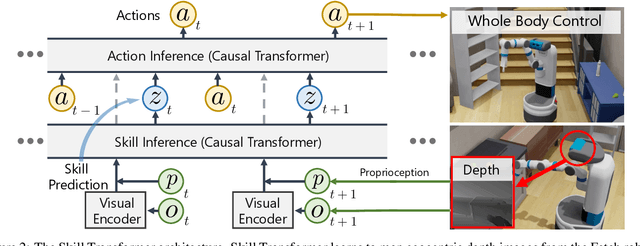
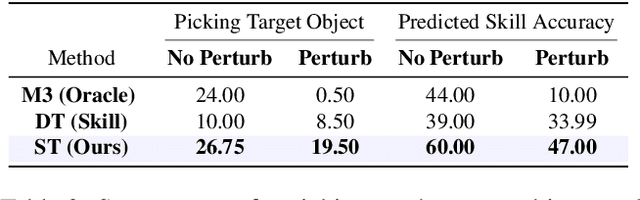
We present Skill Transformer, an approach for solving long-horizon robotic tasks by combining conditional sequence modeling and skill modularity. Conditioned on egocentric and proprioceptive observations of a robot, Skill Transformer is trained end-to-end to predict both a high-level skill (e.g., navigation, picking, placing), and a whole-body low-level action (e.g., base and arm motion), using a transformer architecture and demonstration trajectories that solve the full task. It retains the composability and modularity of the overall task through a skill predictor module while reasoning about low-level actions and avoiding hand-off errors, common in modular approaches. We test Skill Transformer on an embodied rearrangement benchmark and find it performs robust task planning and low-level control in new scenarios, achieving a 2.5x higher success rate than baselines in hard rearrangement problems.
Adaptive Coordination in Social Embodied Rearrangement
May 31, 2023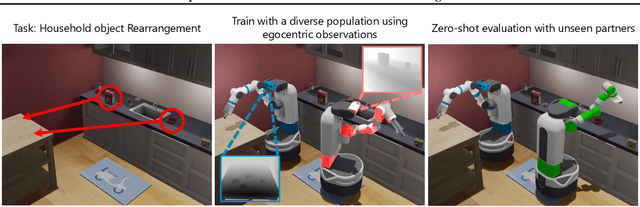
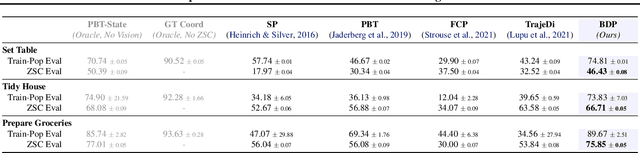
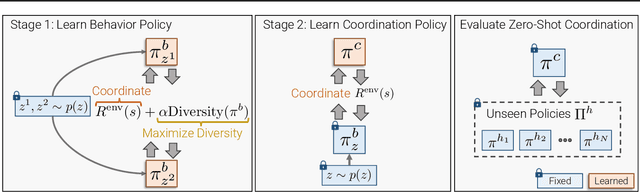
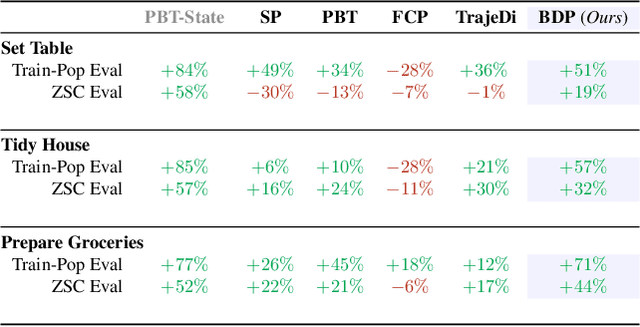
We present the task of "Social Rearrangement", consisting of cooperative everyday tasks like setting up the dinner table, tidying a house or unpacking groceries in a simulated multi-agent environment. In Social Rearrangement, two robots coordinate to complete a long-horizon task, using onboard sensing and egocentric observations, and no privileged information about the environment. We study zero-shot coordination (ZSC) in this task, where an agent collaborates with a new partner, emulating a scenario where a robot collaborates with a new human partner. Prior ZSC approaches struggle to generalize in our complex and visually rich setting, and on further analysis, we find that they fail to generate diverse coordination behaviors at training time. To counter this, we propose Behavior Diversity Play (BDP), a novel ZSC approach that encourages diversity through a discriminability objective. Our results demonstrate that BDP learns adaptive agents that can tackle visual coordination, and zero-shot generalize to new partners in unseen environments, achieving 35% higher success and 32% higher efficiency compared to baselines.
ACE: Adversarial Correspondence Embedding for Cross Morphology Motion Retargeting from Human to Nonhuman Characters
May 24, 2023



Motion retargeting is a promising approach for generating natural and compelling animations for nonhuman characters. However, it is challenging to translate human movements into semantically equivalent motions for target characters with different morphologies due to the ambiguous nature of the problem. This work presents a novel learning-based motion retargeting framework, Adversarial Correspondence Embedding (ACE), to retarget human motions onto target characters with different body dimensions and structures. Our framework is designed to produce natural and feasible robot motions by leveraging generative-adversarial networks (GANs) while preserving high-level motion semantics by introducing an additional feature loss. In addition, we pretrain a robot motion prior that can be controlled in a latent embedding space and seek to establish a compact correspondence. We demonstrate that the proposed framework can produce retargeted motions for three different characters -- a quadrupedal robot with a manipulator, a crab character, and a wheeled manipulator. We further validate the design choices of our framework by conducting baseline comparisons and a user study. We also showcase sim-to-real transfer of the retargeted motions by transferring them to a real Spot robot.
EgoTV: Egocentric Task Verification from Natural Language Task Descriptions
Apr 17, 2023To enable progress towards egocentric agents capable of understanding everyday tasks specified in natural language, we propose a benchmark and a synthetic dataset called Egocentric Task Verification (EgoTV). EgoTV contains multi-step tasks with multiple sub-task decompositions, state changes, object interactions, and sub-task ordering constraints, in addition to abstracted task descriptions that contain only partial details about ways to accomplish a task. We also propose a novel Neuro-Symbolic Grounding (NSG) approach to enable the causal, temporal, and compositional reasoning of such tasks. We demonstrate NSG's capability towards task tracking and verification on our EgoTV dataset and a real-world dataset derived from CrossTask (CTV). Our contributions include the release of the EgoTV and CTV datasets, and the NSG model for future research on egocentric assistive agents.
Adaptive Skill Coordination for Robotic Mobile Manipulation
Apr 01, 2023
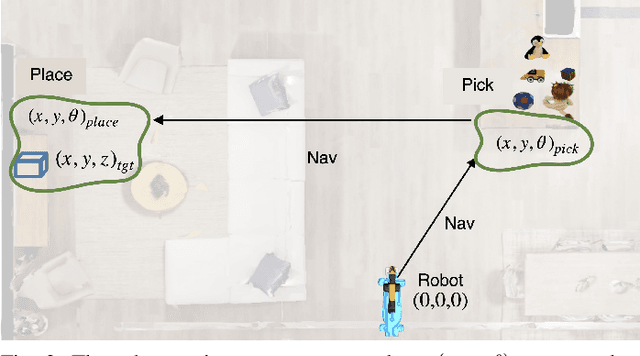
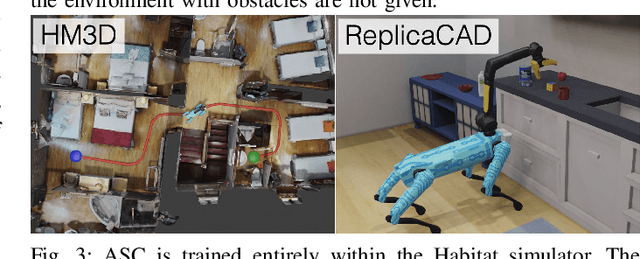
We present Adaptive Skill Coordination (ASC) - an approach for accomplishing long-horizon tasks (e.g., mobile pick-and-place, consisting of navigating to an object, picking it, navigating to another location, placing it, repeating). ASC consists of three components - (1) a library of basic visuomotor skills (navigation, pick, place), (2) a skill coordination policy that chooses which skills are appropriate to use when, and (3) a corrective policy that adapts pre-trained skills when out-of-distribution states are perceived. All components of ASC rely only on onboard visual and proprioceptive sensing, without access to privileged information like pre-built maps or precise object locations, easing real-world deployment. We train ASC in simulated indoor environments, and deploy it zero-shot in two novel real-world environments on the Boston Dynamics Spot robot. ASC achieves near-perfect performance at mobile pick-and-place, succeeding in 59/60 (98%) episodes, while sequentially executing skills succeeds in only 44/60 (73%) episodes. It is robust to hand-off errors, changes in the environment layout, dynamic obstacles (e.g., people), and unexpected disturbances, making it an ideal framework for complex, long-horizon tasks. Supplementary videos available at adaptiveskillcoordination.github.io.