 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Skill Coordination for Robotic Mobile Manipulation
Paper and Code
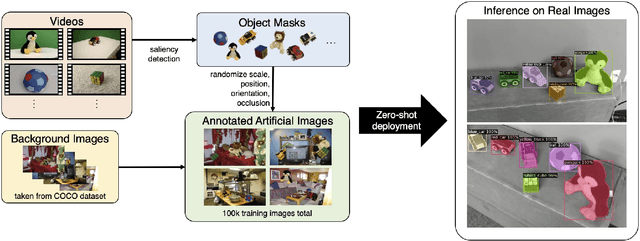
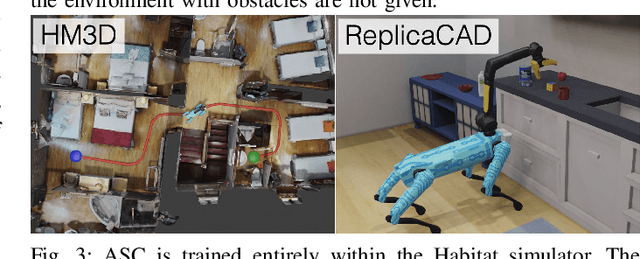
We present Adaptive Skill Coordination (ASC) - an approach for accomplishing long-horizon tasks (e.g., mobile pick-and-place, consisting of navigating to an object, picking it, navigating to another location, placing it, repeating). ASC consists of three components - (1) a library of basic visuomotor skills (navigation, pick, place), (2) a skill coordination policy that chooses which skills are appropriate to use when, and (3) a corrective policy that adapts pre-trained skills when out-of-distribution states are perceived. All components of ASC rely only on onboard visual and proprioceptive sensing, without access to privileged information like pre-built maps or precise object locations, easing real-world deployment. We train ASC in simulated indoor environments, and deploy it zero-shot in two novel real-world environments on the Boston Dynamics Spot robot. ASC achieves near-perfect performance at mobile pick-and-place, succeeding in 59/60 (98%) episodes, while sequentially executing skills succeeds in only 44/60 (73%) episodes. It is robust to hand-off errors, changes in the environment layout, dynamic obstacles (e.g., people), and unexpected disturbances, making it an ideal framework for complex, long-horizon tasks. Supplementary videos available at adaptiveskillcoordination.github.io.