 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks
Oct 31, 2024
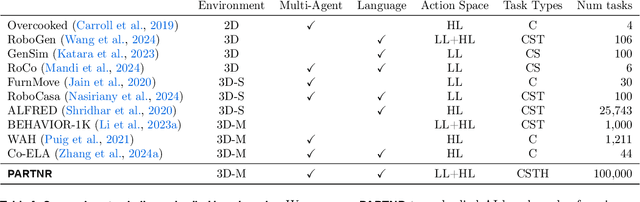

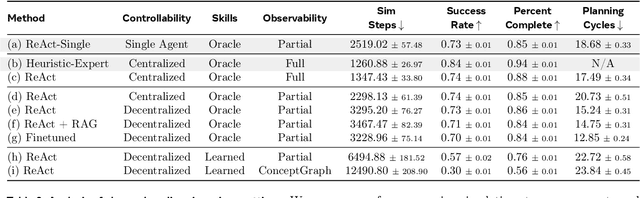
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction.
Habitat 3.0: A Co-Habitat for Humans, Avatars and Robots
Oct 19, 2023



We present Habitat 3.0: a simulation platform for studying collaborative human-robot tasks in home environments. Habitat 3.0 offers contributions across three dimensions: (1) Accurate humanoid simulation: addressing challenges in modeling complex deformable bodies and diversity in appearance and motion, all while ensuring high simulation speed. (2) Human-in-the-loop infrastructure: enabling real human interaction with simulated robots via mouse/keyboard or a VR interface, facilitating evaluation of robot policies with human input. (3) Collaborative tasks: studying two collaborative tasks, Social Navigation and Social Rearrangement. Social Navigation investigates a robot's ability to locate and follow humanoid avatars in unseen environments, whereas Social Rearrangement addresses collaboration between a humanoid and robot while rearranging a scene. These contributions allow us to study end-to-end learned and heuristic baselines for human-robot collaboration in-depth, as well as evaluate them with humans in the loop. Our experiments demonstrate that learned robot policies lead to efficient task completion when collaborating with unseen humanoid agents and human partners that might exhibit behaviors that the robot has not seen before. Additionally, we observe emergent behaviors during collaborative task execution, such as the robot yielding space when obstructing a humanoid agent, thereby allowing the effective completion of the task by the humanoid agent. Furthermore, our experiments using the human-in-the-loop tool demonstrate that our automated evaluation with humanoids can provide an indication of the relative ordering of different policies when evaluated with real human collaborators. Habitat 3.0 unlocks interesting new features in simulators for Embodied AI, and we hope it paves the way for a new frontier of embodied human-AI interaction capabilities.