 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSERA: Soft-Verified Efficient Repository Agents
Jan 28, 2026Open-weight coding agents should hold a fundamental advantage over closed-source systems: they can be specialized to private codebases, encoding repository-specific information directly in their weights. Yet the cost and complexity of training has kept this advantage theoretical. We show it is now practical. We present Soft-Verified Efficient Repository Agents (SERA), an efficient method for training coding agents that enables the rapid and cheap creation of agents specialized to private codebases. Using only supervised finetuning (SFT), SERA achieves state-of-the-art results among fully open-source (open data, method, code) models while matching the performance of frontier open-weight models like Devstral-Small-2. Creating SERA models is 26x cheaper than reinforcement learning and 57x cheaper than previous synthetic data methods to reach equivalent performance. Our method, Soft Verified Generation (SVG), generates thousands of trajectories from a single code repository. Combined with cost-efficiency, this enables specialization to private codebases. Beyond repository specialization, we apply SVG to a larger corpus of codebases, generating over 200,000 synthetic trajectories. We use this dataset to provide detailed analysis of scaling laws, ablations, and confounding factors for training coding agents. Overall, we believe our work will greatly accelerate research on open coding agents and showcase the advantage of open-source models that can specialize to private codebases. We release SERA as the first model in Ai2's Open Coding Agents series, along with all our code, data, and Claude Code integration to support the research community.
Molmo2: Open Weights and Data for Vision-Language Models with Video Understanding and Grounding
Jan 15, 2026Today's strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding -- either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking).
Olmo 3
Dec 15, 2025We introduce Olmo 3, a family of state-of-the-art, fully-open language models at the 7B and 32B parameter scales. Olmo 3 model construction targets long-context reasoning, function calling, coding, instruction following, general chat, and knowledge recall. This release includes the entire model flow, i.e., the full lifecycle of the family of models, including every stage, checkpoint, data point, and dependency used to build it. Our flagship model, Olmo 3 Think 32B, is the strongest fully-open thinking model released to-date.
OlmoEarth: Stable Latent Image Modeling for Multimodal Earth Observation
Nov 17, 2025Earth observation data presents a unique challenge: it is spatial like images, sequential like video or text, and highly multimodal. We present OlmoEarth: a multimodal, spatio-temporal foundation model that employs a novel self-supervised learning formulation, masking strategy, and loss all designed for the Earth observation domain. OlmoEarth achieves state-of-the-art performance compared to 12 other foundation models across a variety of research benchmarks and real-world tasks from external partners. When evaluating embeddings OlmoEarth achieves the best performance on 15 out of 24 tasks, and with full fine-tuning it is the best on 19 of 29 tasks. We deploy OlmoEarth as the backbone of an end-to-end platform for data collection, labeling, training, and inference of Earth observation models. The OlmoEarth Platform puts frontier foundation models and powerful data management tools into the hands of non-profits and NGOs working to solve the world's biggest problems. OlmoEarth source code, training data, and pre-trained weights are available at $\href{https://github.com/allenai/olmoearth_pretrain}{\text{https://github.com/allenai/olmoearth_pretrain}}$.
MolmoAct: Action Reasoning Models that can Reason in Space
Aug 12, 2025



Reasoning is central to purposeful action, yet most robotic foundation models map perception and instructions directly to control, which limits adaptability, generalization, and semantic grounding. We introduce Action Reasoning Models (ARMs), a class of robotic foundation models that integrate perception, planning, and control through a structured three-stage pipeline. Our model, MolmoAct, encodes observations and instructions into depth-aware perception tokens, generates mid-level spatial plans as editable trajectory traces, and predicts precise low-level actions, enabling explainable and steerable behavior. MolmoAct-7B-D achieves strong performance across simulation and real-world settings: 70.5% zero-shot accuracy on SimplerEnv Visual Matching tasks, surpassing closed-source Pi-0 and GR00T N1; 86.6% average success on LIBERO, including an additional 6.3% gain over ThinkAct on long-horizon tasks; and in real-world fine-tuning, an additional 10% (single-arm) and an additional 22.7% (bimanual) task progression over Pi-0-FAST. It also outperforms baselines by an additional 23.3% on out-of-distribution generalization and achieves top human-preference scores for open-ended instruction following and trajectory steering. Furthermore, we release, for the first time, the MolmoAct Dataset -- a mid-training robot dataset comprising over 10,000 high quality robot trajectories across diverse scenarios and tasks. Training with this dataset yields an average 5.5% improvement in general performance over the base model. We release all model weights, training code, our collected dataset, and our action reasoning dataset, establishing MolmoAct as both a state-of-the-art robotics foundation model and an open blueprint for building ARMs that transform perception into purposeful action through structured reasoning. Blogpost: https://allenai.org/blog/molmoact
FlexOlmo: Open Language Models for Flexible Data Use
Jul 09, 2025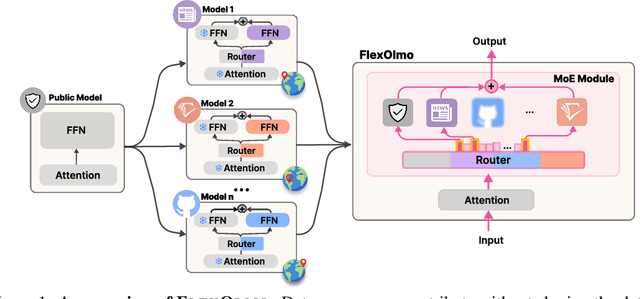
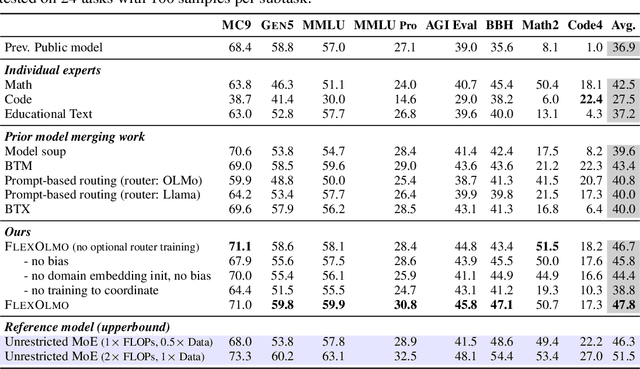
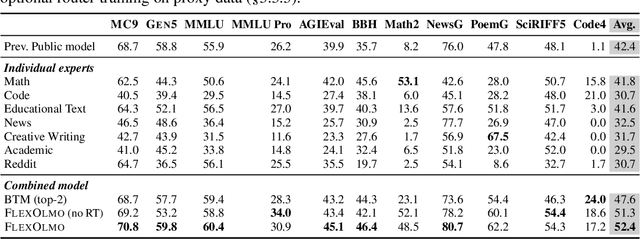
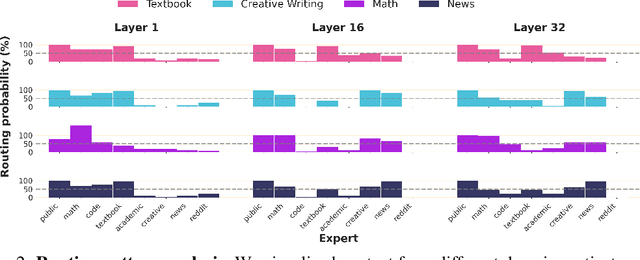
We introduce FlexOlmo, a new class of language models (LMs) that supports (1) distributed training without data sharing, where different model parameters are independently trained on closed datasets, and (2) data-flexible inference, where these parameters along with their associated data can be flexibly included or excluded from model inferences with no further training. FlexOlmo employs a mixture-of-experts (MoE) architecture where each expert is trained independently on closed datasets and later integrated through a new domain-informed routing without any joint training. FlexOlmo is trained on FlexMix, a corpus we curate comprising publicly available datasets alongside seven domain-specific sets, representing realistic approximations of closed sets. We evaluate models with up to 37 billion parameters (20 billion active) on 31 diverse downstream tasks. We show that a general expert trained on public data can be effectively combined with independently trained experts from other data owners, leading to an average 41% relative improvement while allowing users to opt out of certain data based on data licensing or permission requirements. Our approach also outperforms prior model merging methods by 10.1% on average and surpasses the standard MoE trained without data restrictions using the same training FLOPs. Altogether, this research presents a solution for both data owners and researchers in regulated industries with sensitive or protected data. FlexOlmo enables benefiting from closed data while respecting data owners' preferences by keeping their data local and supporting fine-grained control of data access during inference.
Synthetic Visual Genome
Jun 09, 2025Reasoning over visual relationships-spatial, functional, interactional, social, etc.-is considered to be a fundamental component of human cognition. Yet, despite the major advances in visual comprehension in multimodal language models (MLMs), precise reasoning over relationships and their generations remains a challenge. We introduce ROBIN: an MLM instruction-tuned with densely annotated relationships capable of constructing high-quality dense scene graphs at scale. To train ROBIN, we curate SVG, a synthetic scene graph dataset by completing the missing relations of selected objects in existing scene graphs using a teacher MLM and a carefully designed filtering process to ensure high-quality. To generate more accurate and rich scene graphs at scale for any image, we introduce SG-EDIT: a self-distillation framework where GPT-4o further refines ROBIN's predicted scene graphs by removing unlikely relations and/or suggesting relevant ones. In total, our dataset contains 146K images and 5.6M relationships for 2.6M objects. Results show that our ROBIN-3B model, despite being trained on less than 3 million instances, outperforms similar-size models trained on over 300 million instances on relationship understanding benchmarks, and even surpasses larger models up to 13B parameters. Notably, it achieves state-of-the-art performance in referring expression comprehension with a score of 88.9, surpassing the previous best of 87.4. Our results suggest that training on the refined scene graph data is crucial to maintaining high performance across diverse visual reasoning task.
Contrastive Flow Matching
Jun 05, 2025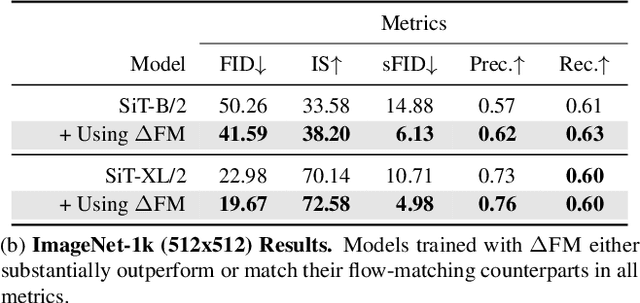
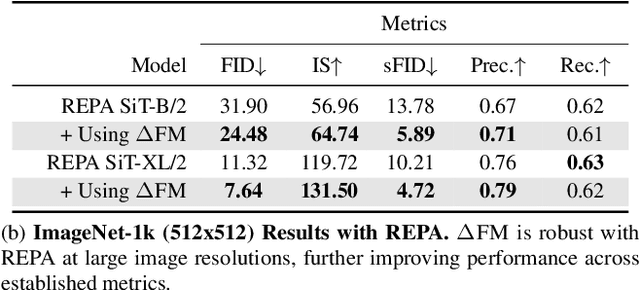
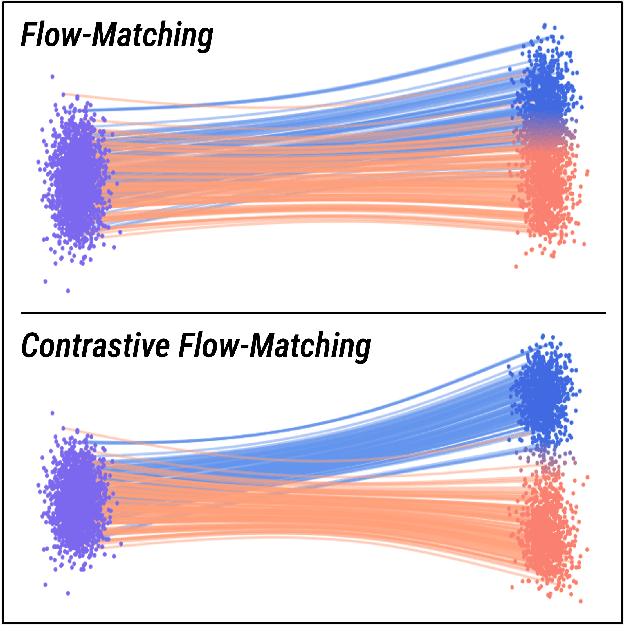
Unconditional flow-matching trains diffusion models to transport samples from a source distribution to a target distribution by enforcing that the flows between sample pairs are unique. However, in conditional settings (e.g., class-conditioned models), this uniqueness is no longer guaranteed--flows from different conditions may overlap, leading to more ambiguous generations. We introduce Contrastive Flow Matching, an extension to the flow matching objective that explicitly enforces uniqueness across all conditional flows, enhancing condition separation. Our approach adds a contrastive objective that maximizes dissimilarities between predicted flows from arbitrary sample pairs. We validate Contrastive Flow Matching by conducting extensive experiments across varying model architectures on both class-conditioned (ImageNet-1k) and text-to-image (CC3M) benchmarks. Notably, we find that training models with Contrastive Flow Matching (1) improves training speed by a factor of up to 9x, (2) requires up to 5x fewer de-noising steps and (3) lowers FID by up to 8.9 compared to training the same models with flow matching. We release our code at: https://github.com/gstoica27/DeltaFM.git.
Convergent Functions, Divergent Forms
May 27, 2025We introduce LOKI, a compute-efficient framework for co-designing morphologies and control policies that generalize across unseen tasks. Inspired by biological adaptation -- where animals quickly adjust to morphological changes -- our method overcomes the inefficiencies of traditional evolutionary and quality-diversity algorithms. We propose learning convergent functions: shared control policies trained across clusters of morphologically similar designs in a learned latent space, drastically reducing the training cost per design. Simultaneously, we promote divergent forms by replacing mutation with dynamic local search, enabling broader exploration and preventing premature convergence. The policy reuse allows us to explore 780$\times$ more designs using 78% fewer simulation steps and 40% less compute per design. Local competition paired with a broader search results in a diverse set of high-performing final morphologies. Using the UNIMAL design space and a flat-terrain locomotion task, LOKI discovers a rich variety of designs -- ranging from quadrupeds to crabs, bipedals, and spinners -- far more diverse than those produced by prior work. These morphologies also transfer better to unseen downstream tasks in agility, stability, and manipulation domains (e.g., 2$\times$ higher reward on bump and push box incline tasks). Overall, our approach produces designs that are both diverse and adaptable, with substantially greater sample efficiency than existing co-design methods. (Project website: https://loki-codesign.github.io/)
Eval3D: Interpretable and Fine-grained Evaluation for 3D Generation
Apr 25, 2025Despite the unprecedented progress in the field of 3D generation, current systems still often fail to produce high-quality 3D assets that are visually appealing and geometrically and semantically consistent across multiple viewpoints. To effectively assess the quality of the generated 3D data, there is a need for a reliable 3D evaluation tool. Unfortunately, existing 3D evaluation metrics often overlook the geometric quality of generated assets or merely rely on black-box multimodal large language models for coarse assessment. In this paper, we introduce Eval3D, a fine-grained, interpretable evaluation tool that can faithfully evaluate the quality of generated 3D assets based on various distinct yet complementary criteria. Our key observation is that many desired properties of 3D generation, such as semantic and geometric consistency, can be effectively captured by measuring the consistency among various foundation models and tools. We thus leverage a diverse set of models and tools as probes to evaluate the inconsistency of generated 3D assets across different aspects. Compared to prior work, Eval3D provides pixel-wise measurement, enables accurate 3D spatial feedback, and aligns more closely with human judgments. We comprehensively evaluate existing 3D generation models using Eval3D and highlight the limitations and challenges of current models.