 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMolmo2: Open Weights and Data for Vision-Language Models with Video Understanding and Grounding
Jan 15, 2026Today's strongest video-language models (VLMs) remain proprietary. The strongest open-weight models either rely on synthetic data from proprietary VLMs, effectively distilling from them, or do not disclose their training data or recipe. As a result, the open-source community lacks the foundations needed to improve on the state-of-the-art video (and image) language models. Crucially, many downstream applications require more than just high-level video understanding; they require grounding -- either by pointing or by tracking in pixels. Even proprietary models lack this capability. We present Molmo2, a new family of VLMs that are state-of-the-art among open-source models and demonstrate exceptional new capabilities in point-driven grounding in single image, multi-image, and video tasks. Our key contribution is a collection of 7 new video datasets and 2 multi-image datasets, including a dataset of highly detailed video captions for pre-training, a free-form video Q&A dataset for fine-tuning, a new object tracking dataset with complex queries, and an innovative new video pointing dataset, all collected without the use of closed VLMs. We also present a training recipe for this data utilizing an efficient packing and message-tree encoding scheme, and show bi-directional attention on vision tokens and a novel token-weight strategy improves performance. Our best-in-class 8B model outperforms others in the class of open weight and data models on short videos, counting, and captioning, and is competitive on long-videos. On video-grounding Molmo2 significantly outperforms existing open-weight models like Qwen3-VL (35.5 vs 29.6 accuracy on video counting) and surpasses proprietary models like Gemini 3 Pro on some tasks (38.4 vs 20.0 F1 on video pointing and 56.2 vs 41.1 J&F on video tracking).
Synthetic Visual Genome
Jun 09, 2025Reasoning over visual relationships-spatial, functional, interactional, social, etc.-is considered to be a fundamental component of human cognition. Yet, despite the major advances in visual comprehension in multimodal language models (MLMs), precise reasoning over relationships and their generations remains a challenge. We introduce ROBIN: an MLM instruction-tuned with densely annotated relationships capable of constructing high-quality dense scene graphs at scale. To train ROBIN, we curate SVG, a synthetic scene graph dataset by completing the missing relations of selected objects in existing scene graphs using a teacher MLM and a carefully designed filtering process to ensure high-quality. To generate more accurate and rich scene graphs at scale for any image, we introduce SG-EDIT: a self-distillation framework where GPT-4o further refines ROBIN's predicted scene graphs by removing unlikely relations and/or suggesting relevant ones. In total, our dataset contains 146K images and 5.6M relationships for 2.6M objects. Results show that our ROBIN-3B model, despite being trained on less than 3 million instances, outperforms similar-size models trained on over 300 million instances on relationship understanding benchmarks, and even surpasses larger models up to 13B parameters. Notably, it achieves state-of-the-art performance in referring expression comprehension with a score of 88.9, surpassing the previous best of 87.4. Our results suggest that training on the refined scene graph data is crucial to maintaining high performance across diverse visual reasoning task.
BLIP3-KALE: Knowledge Augmented Large-Scale Dense Captions
Nov 12, 2024
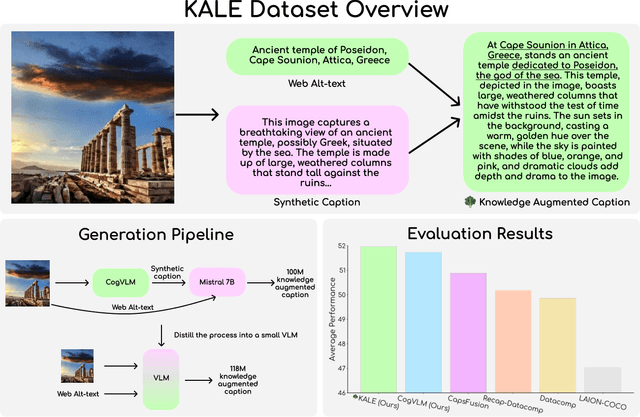
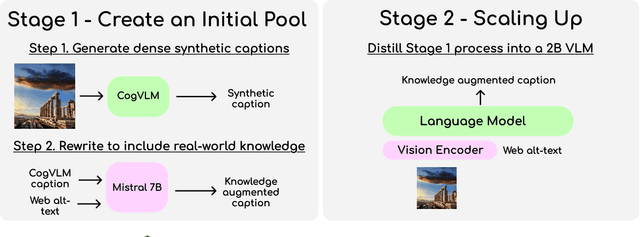

We introduce BLIP3-KALE, a dataset of 218 million image-text pairs that bridges the gap between descriptive synthetic captions and factual web-scale alt-text. KALE augments synthetic dense image captions with web-scale alt-text to generate factually grounded image captions. Our two-stage approach leverages large vision-language models and language models to create knowledge-augmented captions, which are then used to train a specialized VLM for scaling up the dataset. We train vision-language models on KALE and demonstrate improvements on vision-language tasks. Our experiments show the utility of KALE for training more capable and knowledgeable multimodal models. We release the KALE dataset at https://huggingface.co/datasets/Salesforce/blip3-kale
ActionAtlas: A VideoQA Benchmark for Domain-specialized Action Recognition
Oct 08, 2024


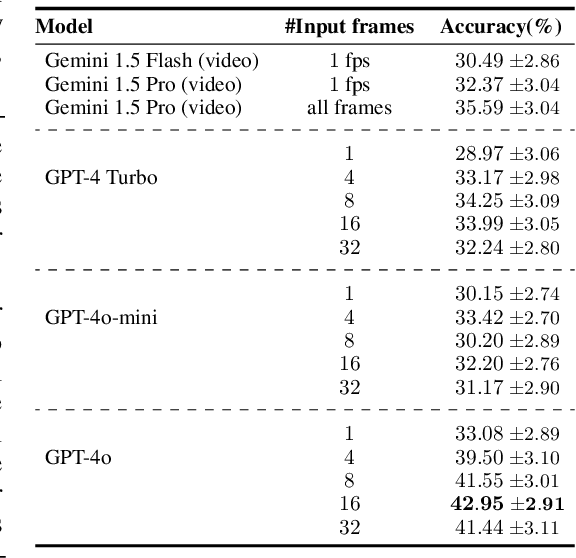
Our world is full of varied actions and moves across specialized domains that we, as humans, strive to identify and understand. Within any single domain, actions can often appear quite similar, making it challenging for deep models to distinguish them accurately. To evaluate the effectiveness of multimodal foundation models in helping us recognize such actions, we present ActionAtlas v1.0, a multiple-choice video question answering benchmark featuring short videos across various sports. Each video in the dataset is paired with a question and four or five choices. The question pinpoints specific individuals, asking which choice "best" describes their action within a certain temporal context. Overall, the dataset includes 934 videos showcasing 580 unique actions across 56 sports, with a total of 1896 actions within choices. Unlike most existing video question answering benchmarks that only cover simplistic actions, often identifiable from a single frame, ActionAtlas focuses on intricate movements and rigorously tests the model's capability to discern subtle differences between moves that look similar within each domain. We evaluate open and proprietary foundation models on this benchmark, finding that the best model, GPT-4o, achieves a maximum accuracy of 45.52%. Meanwhile, Non-expert crowd workers, provided with action description for each choice, achieve 61.64% accuracy, where random chance is approximately 21%. Our findings with state-of-the-art models indicate that having a high frame sampling rate is important for accurately recognizing actions in ActionAtlas, a feature that some leading proprietary video models, such as Gemini, do not include in their default configuration.
Molmo and PixMo: Open Weights and Open Data for State-of-the-Art Multimodal Models
Sep 25, 2024



Today's most advanced multimodal models remain proprietary. The strongest open-weight models rely heavily on synthetic data from proprietary VLMs to achieve good performance, effectively distilling these closed models into open ones. As a result, the community is still missing foundational knowledge about how to build performant VLMs from scratch. We present Molmo, a new family of VLMs that are state-of-the-art in their class of openness. Our key innovation is a novel, highly detailed image caption dataset collected entirely from human annotators using speech-based descriptions. To enable a wide array of user interactions, we also introduce a diverse dataset mixture for fine-tuning that includes in-the-wild Q&A and innovative 2D pointing data. The success of our approach relies on careful choices for the model architecture details, a well-tuned training pipeline, and, most critically, the quality of our newly collected datasets, all of which will be released. The best-in-class 72B model within the Molmo family not only outperforms others in the class of open weight and data models but also compares favorably against proprietary systems like GPT-4o, Claude 3.5, and Gemini 1.5 on both academic benchmarks and human evaluation. We will be releasing all of our model weights, captioning and fine-tuning data, and source code in the near future. Select model weights, inference code, and demo are available at https://molmo.allenai.org.
Certainly Uncertain: A Benchmark and Metric for Multimodal Epistemic and Aleatoric Awareness
Jul 02, 2024



The ability to acknowledge the inevitable uncertainty in their knowledge and reasoning is a prerequisite for AI systems to be truly truthful and reliable. In this paper, we present a taxonomy of uncertainty specific to vision-language AI systems, distinguishing between epistemic uncertainty (arising from a lack of information) and aleatoric uncertainty (due to inherent unpredictability), and further explore finer categories within. Based on this taxonomy, we synthesize a benchmark dataset, CertainlyUncertain, featuring 178K visual question answering (VQA) samples as contrastive pairs. This is achieved by 1) inpainting images to make previously answerable questions into unanswerable ones; and 2) using image captions to prompt large language models for both answerable and unanswerable questions. Additionally, we introduce a new metric confidence-weighted accuracy, that is well correlated with both accuracy and calibration error, to address the shortcomings of existing metrics.
Superposed Decoding: Multiple Generations from a Single Autoregressive Inference Pass
May 29, 2024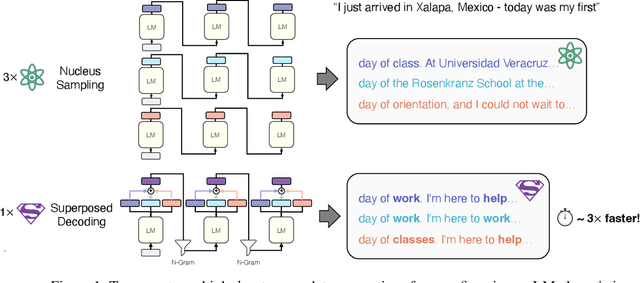

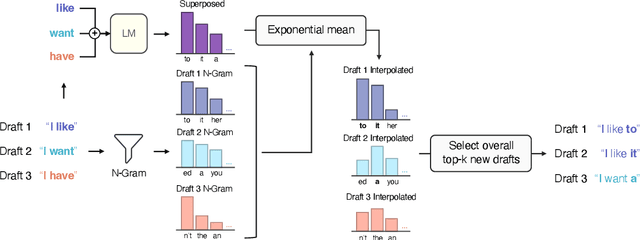
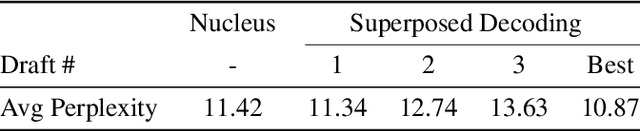
Many applications today provide users with multiple auto-complete drafts as they type, including GitHub's code completion, Gmail's smart compose, and Apple's messaging auto-suggestions. Under the hood, language models support this by running an autoregressive inference pass to provide a draft. Consequently, providing $k$ drafts to the user requires running an expensive language model $k$ times. To alleviate the computation cost of running $k$ inference passes, we propose Superposed Decoding, a new decoding algorithm that generates $k$ drafts at the computation cost of one autoregressive inference pass. We achieve this by feeding a superposition of the most recent token embeddings from the $k$ drafts as input to the next decoding step of the language model. At every inference step we combine the $k$ drafts with the top-$k$ tokens to get $k^2$ new drafts and cache the $k$ most likely options, using an n-gram interpolation with minimal compute overhead to filter out incoherent generations. Our experiments show that $k$ drafts from Superposed Decoding are at least as coherent and factual as Nucleus Sampling and Greedy Decoding respectively, while being at least $2.44\times$ faster for $k\ge3$. In a compute-normalized setting, user evaluations demonstrably favor text generated by Superposed Decoding over Nucleus Sampling. Code and more examples open-sourced at https://github.com/RAIVNLab/SuperposedDecoding.
Agent AI: Surveying the Horizons of Multimodal Interaction
Jan 07, 2024



Multi-modal AI systems will likely become a ubiquitous presence in our everyday lives. A promising approach to making these systems more interactive is to embody them as agents within physical and virtual environments. At present, systems leverage existing foundation models as the basic building blocks for the creation of embodied agents. Embedding agents within such environments facilitates the ability of models to process and interpret visual and contextual data, which is critical for the creation of more sophisticated and context-aware AI systems. For example, a system that can perceive user actions, human behavior, environmental objects, audio expressions, and the collective sentiment of a scene can be used to inform and direct agent responses within the given environment. To accelerate research on agent-based multimodal intelligence, we define "Agent AI" as a class of interactive systems that can perceive visual stimuli, language inputs, and other environmentally-grounded data, and can produce meaningful embodied action with infinite agent. In particular, we explore systems that aim to improve agents based on next-embodied action prediction by incorporating external knowledge, multi-sensory inputs, and human feedback. We argue that by developing agentic AI systems in grounded environments, one can also mitigate the hallucinations of large foundation models and their tendency to generate environmentally incorrect outputs. The emerging field of Agent AI subsumes the broader embodied and agentic aspects of multimodal interactions. Beyond agents acting and interacting in the physical world, we envision a future where people can easily create any virtual reality or simulated scene and interact with agents embodied within the virtual environment.
Localized Symbolic Knowledge Distillation for Visual Commonsense Models
Dec 12, 2023


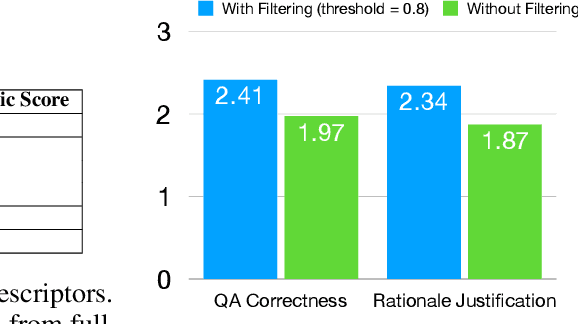
Instruction following vision-language (VL) models offer a flexible interface that supports a broad range of multimodal tasks in a zero-shot fashion. However, interfaces that operate on full images do not directly enable the user to "point to" and access specific regions within images. This capability is important not only to support reference-grounded VL benchmarks, but also, for practical applications that require precise within-image reasoning. We build Localized Visual Commonsense models, which allow users to specify (multiple) regions as input. We train our model by sampling localized commonsense knowledge from a large language model (LLM): specifically, we prompt an LLM to collect commonsense knowledge given a global literal image description and a local literal region description automatically generated by a set of VL models. With a separately trained critic model that selects high-quality examples, we find that training on the localized commonsense corpus can successfully distill existing VL models to support a reference-as-input interface. Empirical results and human evaluations in a zero-shot setup demonstrate that our distillation method results in more precise VL models of reasoning compared to a baseline of passing a generated referring expression to an LLM.
ArK: Augmented Reality with Knowledge Interactive Emergent Ability
May 01, 2023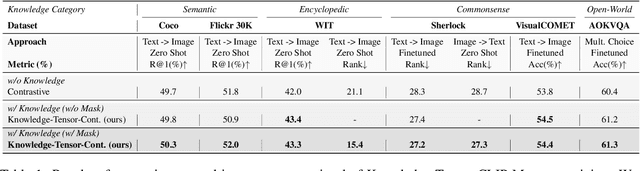
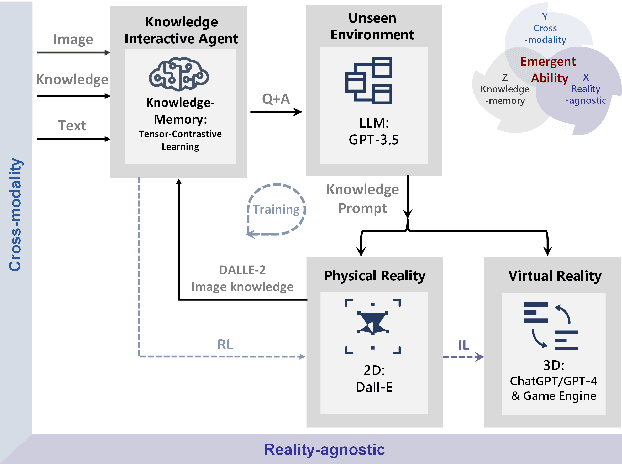
Despite the growing adoption of mixed reality and interactive AI agents, it remains challenging for these systems to generate high quality 2D/3D scenes in unseen environments. The common practice requires deploying an AI agent to collect large amounts of data for model training for every new task. This process is costly, or even impossible, for many domains. In this study, we develop an infinite agent that learns to transfer knowledge memory from general foundation models (e.g. GPT4, DALLE) to novel domains or scenarios for scene understanding and generation in the physical or virtual world. The heart of our approach is an emerging mechanism, dubbed Augmented Reality with Knowledge Inference Interaction (ArK), which leverages knowledge-memory to generate scenes in unseen physical world and virtual reality environments. The knowledge interactive emergent ability (Figure 1) is demonstrated as the observation learns i) micro-action of cross-modality: in multi-modality models to collect a large amount of relevant knowledge memory data for each interaction task (e.g., unseen scene understanding) from the physical reality; and ii) macro-behavior of reality-agnostic: in mix-reality environments to improve interactions that tailor to different characterized roles, target variables, collaborative information, and so on. We validate the effectiveness of ArK on the scene generation and editing tasks. We show that our ArK approach, combined with large foundation models, significantly improves the quality of generated 2D/3D scenes, compared to baselines, demonstrating the potential benefit of incorporating ArK in generative AI for applications such as metaverse and gaming simulation.