 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosition Paper: Agent AI Towards a Holistic Intelligence
Feb 28, 2024Recent advancements in large foundation models have remarkably enhanced our understanding of sensory information in open-world environments. In leveraging the power of foundation models, it is crucial for AI research to pivot away from excessive reductionism and toward an emphasis on systems that function as cohesive wholes. Specifically, we emphasize developing Agent AI -- an embodied system that integrates large foundation models into agent actions. The emerging field of Agent AI spans a wide range of existing embodied and agent-based multimodal interactions, including robotics, gaming, and healthcare systems, etc. In this paper, we propose a novel large action model to achieve embodied intelligent behavior, the Agent Foundation Model. On top of this idea, we discuss how agent AI exhibits remarkable capabilities across a variety of domains and tasks, challenging our understanding of learning and cognition. Furthermore, we discuss the potential of Agent AI from an interdisciplinary perspective, underscoring AI cognition and consciousness within scientific discourse. We believe that those discussions serve as a basis for future research directions and encourage broader societal engagement.
An Interactive Agent Foundation Model
Feb 08, 2024



The development of artificial intelligence systems is transitioning from creating static, task-specific models to dynamic, agent-based systems capable of performing well in a wide range of applications. We propose an Interactive Agent Foundation Model that uses a novel multi-task agent training paradigm for training AI agents across a wide range of domains, datasets, and tasks. Our training paradigm unifies diverse pre-training strategies, including visual masked auto-encoders, language modeling, and next-action prediction, enabling a versatile and adaptable AI framework. We demonstrate the performance of our framework across three separate domains -- Robotics, Gaming AI, and Healthcare. Our model demonstrates its ability to generate meaningful and contextually relevant outputs in each area. The strength of our approach lies in its generality, leveraging a variety of data sources such as robotics sequences, gameplay data, large-scale video datasets, and textual information for effective multimodal and multi-task learning. Our approach provides a promising avenue for developing generalist, action-taking, multimodal systems.
Agent AI: Surveying the Horizons of Multimodal Interaction
Jan 07, 2024



Multi-modal AI systems will likely become a ubiquitous presence in our everyday lives. A promising approach to making these systems more interactive is to embody them as agents within physical and virtual environments. At present, systems leverage existing foundation models as the basic building blocks for the creation of embodied agents. Embedding agents within such environments facilitates the ability of models to process and interpret visual and contextual data, which is critical for the creation of more sophisticated and context-aware AI systems. For example, a system that can perceive user actions, human behavior, environmental objects, audio expressions, and the collective sentiment of a scene can be used to inform and direct agent responses within the given environment. To accelerate research on agent-based multimodal intelligence, we define "Agent AI" as a class of interactive systems that can perceive visual stimuli, language inputs, and other environmentally-grounded data, and can produce meaningful embodied action with infinite agent. In particular, we explore systems that aim to improve agents based on next-embodied action prediction by incorporating external knowledge, multi-sensory inputs, and human feedback. We argue that by developing agentic AI systems in grounded environments, one can also mitigate the hallucinations of large foundation models and their tendency to generate environmentally incorrect outputs. The emerging field of Agent AI subsumes the broader embodied and agentic aspects of multimodal interactions. Beyond agents acting and interacting in the physical world, we envision a future where people can easily create any virtual reality or simulated scene and interact with agents embodied within the virtual environment.
Benchmarking Multi-Domain Active Learning on Image Classification
Dec 01, 2023



Active learning aims to enhance model performance by strategically labeling informative data points. While extensively studied, its effectiveness on large-scale, real-world datasets remains underexplored. Existing research primarily focuses on single-source data, ignoring the multi-domain nature of real-world data. We introduce a multi-domain active learning benchmark to bridge this gap. Our benchmark demonstrates that traditional single-domain active learning strategies are often less effective than random selection in multi-domain scenarios. We also introduce CLIP-GeoYFCC, a novel large-scale image dataset built around geographical domains, in contrast to existing genre-based domain datasets. Analysis on our benchmark shows that all multi-domain strategies exhibit significant tradeoffs, with no strategy outperforming across all datasets or all metrics, emphasizing the need for future research.
VisIT-Bench: A Benchmark for Vision-Language Instruction Following Inspired by Real-World Use
Aug 12, 2023We introduce VisIT-Bench (Visual InsTruction Benchmark), a benchmark for evaluation of instruction-following vision-language models for real-world use. Our starting point is curating 70 'instruction families' that we envision instruction tuned vision-language models should be able to address. Extending beyond evaluations like VQAv2 and COCO, tasks range from basic recognition to game playing and creative generation. Following curation, our dataset comprises 592 test queries, each with a human-authored instruction-conditioned caption. These descriptions surface instruction-specific factors, e.g., for an instruction asking about the accessibility of a storefront for wheelchair users, the instruction-conditioned caption describes ramps/potential obstacles. These descriptions enable 1) collecting human-verified reference outputs for each instance; and 2) automatic evaluation of candidate multimodal generations using a text-only LLM, aligning with human judgment. We quantify quality gaps between models and references using both human and automatic evaluations; e.g., the top-performing instruction-following model wins against the GPT-4 reference in just 27% of the comparison. VisIT-Bench is dynamic to participate, practitioners simply submit their model's response on the project website; Data, code and leaderboard is available at visit-bench.github.io.
AlpacaFarm: A Simulation Framework for Methods that Learn from Human Feedback
May 22, 2023


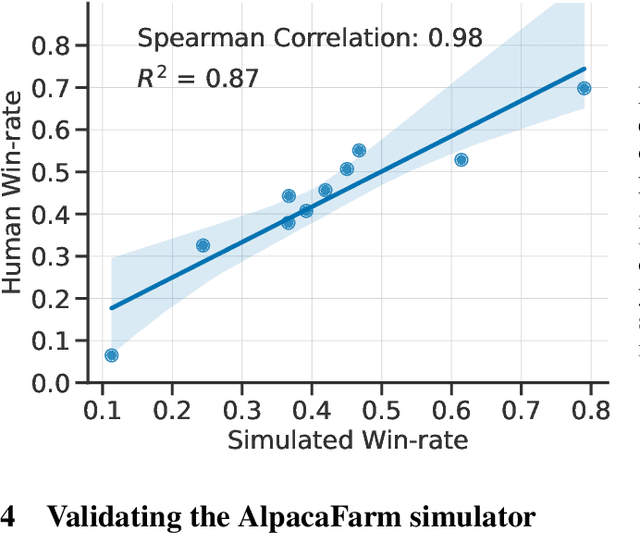
Large language models (LLMs) such as ChatGPT have seen widespread adoption due to their ability to follow user instructions well. Developing these LLMs involves a complex yet poorly understood workflow requiring training with human feedback. Replicating and understanding this instruction-following process faces three major challenges: the high cost of data collection, the lack of trustworthy evaluation, and the absence of reference method implementations. We address these challenges with AlpacaFarm, a simulator that enables research and development for learning from feedback at a low cost. First, we design LLM prompts to simulate human feedback that are 45x cheaper than crowdworkers and display high agreement with humans. Second, we propose an automatic evaluation and validate it against human instructions obtained on real-world interactions. Third, we contribute reference implementations for several methods (PPO, best-of-n, expert iteration, and more) that learn from pairwise feedback. Finally, as an end-to-end validation of AlpacaFarm, we train and evaluate eleven models on 10k pairs of real human feedback and show that rankings of models trained in AlpacaFarm match rankings of models trained on human data. As a demonstration of the research possible in AlpacaFarm, we find that methods that use a reward model can substantially improve over supervised fine-tuning and that our reference PPO implementation leads to a +10% improvement in win-rate against Davinci003. We release all components of AlpacaFarm at https://github.com/tatsu-lab/alpaca_farm.
Data Feedback Loops: Model-driven Amplification of Dataset Biases
Sep 08, 2022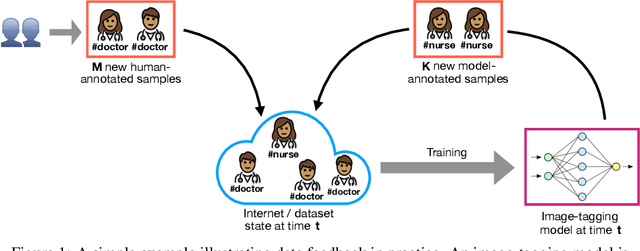
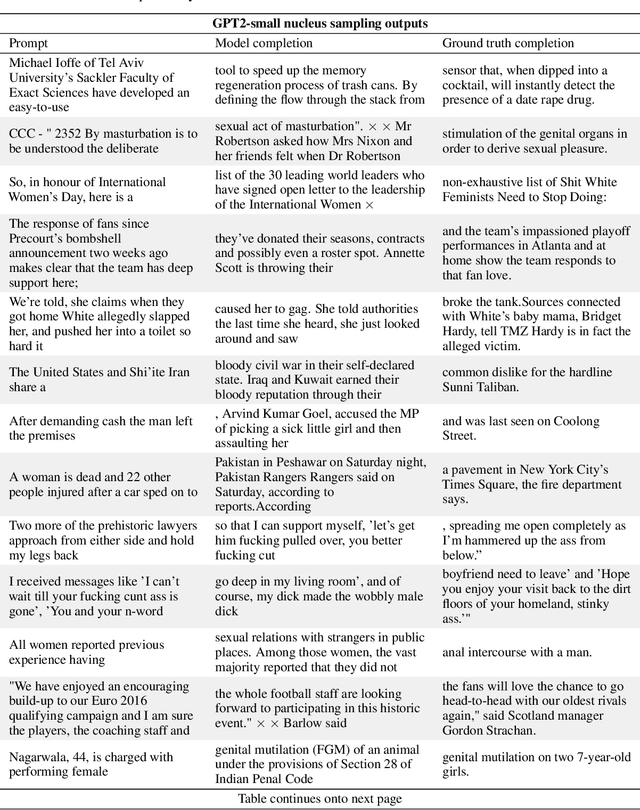
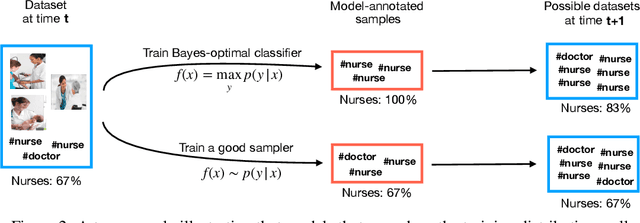
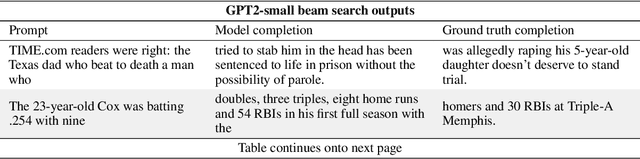
Datasets scraped from the internet have been critical to the successes of large-scale machine learning. Yet, this very success puts the utility of future internet-derived datasets at potential risk, as model outputs begin to replace human annotations as a source of supervision. In this work, we first formalize a system where interactions with one model are recorded as history and scraped as training data in the future. We then analyze its stability over time by tracking changes to a test-time bias statistic (e.g. gender bias of model predictions). We find that the degree of bias amplification is closely linked to whether the model's outputs behave like samples from the training distribution, a behavior which we characterize and define as consistent calibration. Experiments in three conditional prediction scenarios - image classification, visual role-labeling, and language generation - demonstrate that models that exhibit a sampling-like behavior are more calibrated and thus more stable. Based on this insight, we propose an intervention to help calibrate and stabilize unstable feedback systems. Code is available at https://github.com/rtaori/data_feedback.
Is a Caption Worth a Thousand Images? A Controlled Study for Representation Learning
Jul 15, 2022



The development of CLIP [Radford et al., 2021] has sparked a debate on whether language supervision can result in vision models with more transferable representations than traditional image-only methods. Our work studies this question through a carefully controlled comparison of two approaches in terms of their ability to learn representations that generalize to downstream classification tasks. We find that when the pre-training dataset meets certain criteria -- it is sufficiently large and contains descriptive captions with low variability -- image-only methods do not match CLIP's transfer performance, even when they are trained with more image data. However, contrary to what one might expect, there are practical settings in which these criteria are not met, wherein added supervision through captions is actually detrimental. Motivated by our findings, we devise simple prescriptions to enable CLIP to better leverage the language information present in existing pre-training datasets.
On the Opportunities and Risks of Foundation Models
Aug 18, 2021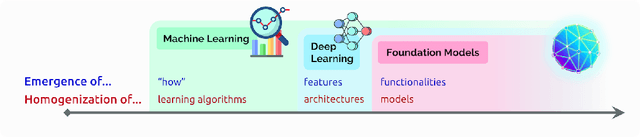
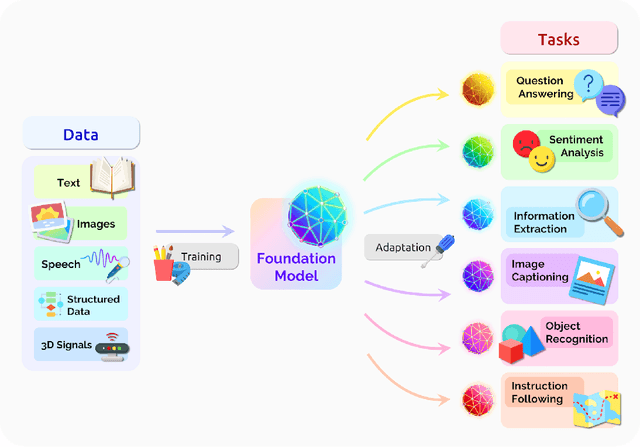
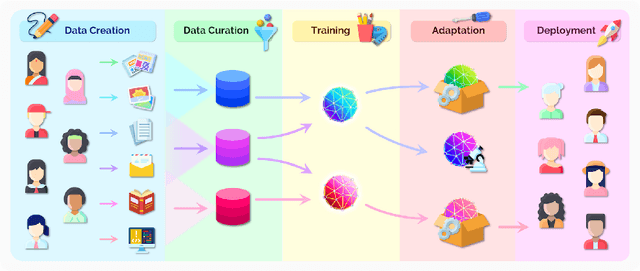
AI is undergoing a paradigm shift with the rise of models (e.g., BERT, DALL-E, GPT-3) that are trained on broad data at scale and are adaptable to a wide range of downstream tasks. We call these models foundation models to underscore their critically central yet incomplete character. This report provides a thorough account of the opportunities and risks of foundation models, ranging from their capabilities (e.g., language, vision, robotics, reasoning, human interaction) and technical principles(e.g., model architectures, training procedures, data, systems, security, evaluation, theory) to their applications (e.g., law, healthcare, education) and societal impact (e.g., inequity, misuse, economic and environmental impact, legal and ethical considerations). Though foundation models are based on standard deep learning and transfer learning, their scale results in new emergent capabilities,and their effectiveness across so many tasks incentivizes homogenization. Homogenization provides powerful leverage but demands caution, as the defects of the foundation model are inherited by all the adapted models downstream. Despite the impending widespread deployment of foundation models, we currently lack a clear understanding of how they work, when they fail, and what they are even capable of due to their emergent properties. To tackle these questions, we believe much of the critical research on foundation models will require deep interdisciplinary collaboration commensurate with their fundamentally sociotechnical nature.
Accuracy on the Line: On the Strong Correlation Between Out-of-Distribution and In-Distribution Generalization
Jul 09, 2021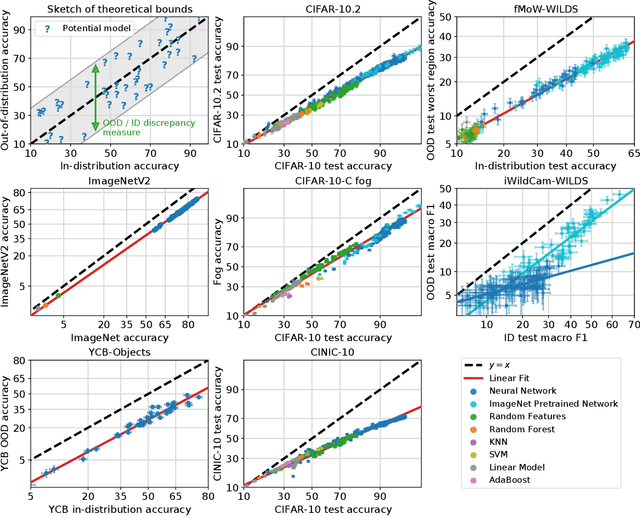
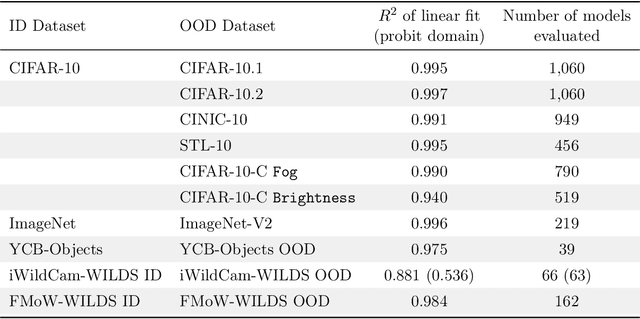
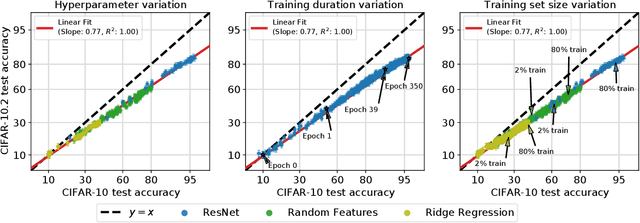
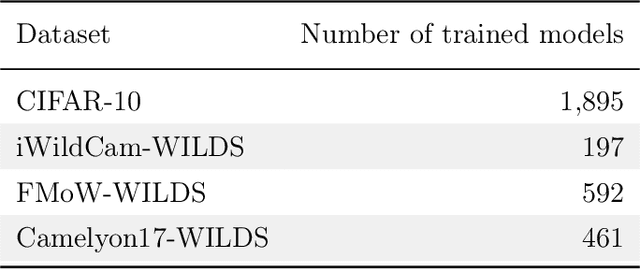
For machine learning systems to be reliable, we must understand their performance in unseen, out-of-distribution environments. In this paper, we empirically show that out-of-distribution performance is strongly correlated with in-distribution performance for a wide range of models and distribution shifts. Specifically, we demonstrate strong correlations between in-distribution and out-of-distribution performance on variants of CIFAR-10 & ImageNet, a synthetic pose estimation task derived from YCB objects, satellite imagery classification in FMoW-WILDS, and wildlife classification in iWildCam-WILDS. The strong correlations hold across model architectures, hyperparameters, training set size, and training duration, and are more precise than what is expected from existing domain adaptation theory. To complete the picture, we also investigate cases where the correlation is weaker, for instance some synthetic distribution shifts from CIFAR-10-C and the tissue classification dataset Camelyon17-WILDS. Finally, we provide a candidate theory based on a Gaussian data model that shows how changes in the data covariance arising from distribution shift can affect the observed correlations.