 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRE-TRAC: REcursive TRAjectory Compression for Deep Search Agents
Feb 02, 2026LLM-based deep research agents are largely built on the ReAct framework. This linear design makes it difficult to revisit earlier states, branch into alternative search directions, or maintain global awareness under long contexts, often leading to local optima, redundant exploration, and inefficient search. We propose Re-TRAC, an agentic framework that performs cross-trajectory exploration by generating a structured state representation after each trajectory to summarize evidence, uncertainties, failures, and future plans, and conditioning subsequent trajectories on this state representation. This enables iterative reflection and globally informed planning, reframing research as a progressive process. Empirical results show that Re-TRAC consistently outperforms ReAct by 15-20% on BrowseComp with frontier LLMs. For smaller models, we introduce Re-TRAC-aware supervised fine-tuning, achieving state-of-the-art performance at comparable scales. Notably, Re-TRAC shows a monotonic reduction in tool calls and token usage across rounds, indicating progressively targeted exploration driven by cross-trajectory reflection rather than redundant search.
AdaReasoner: Dynamic Tool Orchestration for Iterative Visual Reasoning
Jan 26, 2026When humans face problems beyond their immediate capabilities, they rely on tools, providing a promising paradigm for improving visual reasoning in multimodal large language models (MLLMs). Effective reasoning, therefore, hinges on knowing which tools to use, when to invoke them, and how to compose them over multiple steps, even when faced with new tools or new tasks. We introduce \textbf{AdaReasoner}, a family of multimodal models that learn tool use as a general reasoning skill rather than as tool-specific or explicitly supervised behavior. AdaReasoner is enabled by (i) a scalable data curation pipeline exposing models to long-horizon, multi-step tool interactions; (ii) Tool-GRPO, a reinforcement learning algorithm that optimizes tool selection and sequencing based on end-task success; and (iii) an adaptive learning mechanism that dynamically regulates tool usage. Together, these components allow models to infer tool utility from task context and intermediate outcomes, enabling coordination of multiple tools and generalization to unseen tools. Empirically, AdaReasoner exhibits strong tool-adaptive and generalization behaviors: it autonomously adopts beneficial tools, suppresses irrelevant ones, and adjusts tool usage frequency based on task demands, despite never being explicitly trained to do so. These capabilities translate into state-of-the-art performance across challenging benchmarks, improving the 7B base model by +24.9\% on average and surpassing strong proprietary systems such as GPT-5 on multiple tasks, including VSP and Jigsaw.
ProImage-Bench: Rubric-Based Evaluation for Professional Image Generation
Dec 13, 2025We study professional image generation, where a model must synthesize information-dense, scientifically precise illustrations from technical descriptions rather than merely produce visually plausible pictures. To quantify the progress, we introduce ProImage-Bench, a rubric-based benchmark that targets biology schematics, engineering/patent drawings, and general scientific diagrams. For 654 figures collected from real textbooks and technical reports, we construct detailed image instructions and a hierarchy of rubrics that decompose correctness into 6,076 criteria and 44,131 binary checks. Rubrics are derived from surrounding text and reference figures using large multimodal models, and are evaluated by an automated LMM-based judge with a principled penalty scheme that aggregates sub-question outcomes into interpretable criterion scores. We benchmark several representative text-to-image models on ProImage-Bench and find that, despite strong open-domain performance, the best base model reaches only 0.791 rubric accuracy and 0.553 criterion score overall, revealing substantial gaps in fine-grained scientific fidelity. Finally, we show that the same rubrics provide actionable supervision: feeding failed checks back into an editing model for iterative refinement boosts a strong generator from 0.653 to 0.865 in rubric accuracy and from 0.388 to 0.697 in criterion score. ProImage-Bench thus offers both a rigorous diagnostic for professional image generation and a scalable signal for improving specification-faithful scientific illustrations.
Computer-Use Agents as Judges for Generative User Interface
Nov 19, 2025Computer-Use Agents (CUA) are becoming increasingly capable of autonomously operating digital environments through Graphical User Interfaces (GUI). Yet, most GUI remain designed primarily for humans--prioritizing aesthetics and usability--forcing agents to adopt human-oriented behaviors that are unnecessary for efficient task execution. At the same time, rapid advances in coding-oriented language models (Coder) have transformed automatic GUI design. This raises a fundamental question: Can CUA as judges to assist Coder for automatic GUI design? To investigate, we introduce AUI-Gym, a benchmark for Automatic GUI development spanning 52 applications across diverse domains. Using language models, we synthesize 1560 tasks that simulate real-world scenarios. To ensure task reliability, we further develop a verifier that programmatically checks whether each task is executable within its environment. Building on this, we propose a Coder-CUA in Collaboration framework: the Coder acts as Designer, generating and revising websites, while the CUA serves as Judge, evaluating functionality and refining designs. Success is measured not by visual appearance, but by task solvability and CUA navigation success rate. To turn CUA feedback into usable guidance, we design a CUA Dashboard that compresses multi-step navigation histories into concise visual summaries, offering interpretable guidance for iterative redesign. By positioning agents as both designers and judges, our framework shifts interface design toward agent-native efficiency and reliability. Our work takes a step toward shifting agents from passive use toward active participation in digital environments. Our code and dataset are available at https://github.com/showlab/AUI.
ThinkMorph: Emergent Properties in Multimodal Interleaved Chain-of-Thought Reasoning
Oct 30, 2025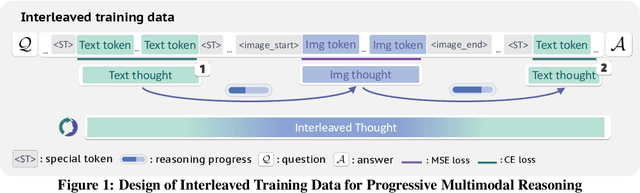
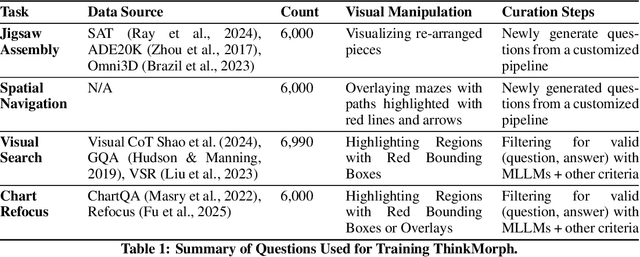
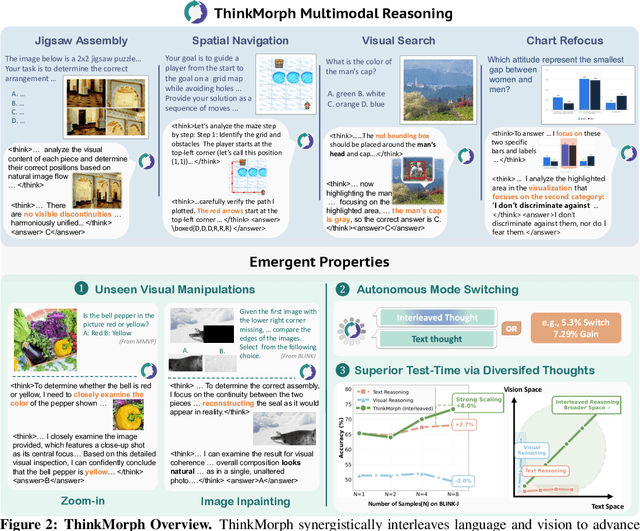
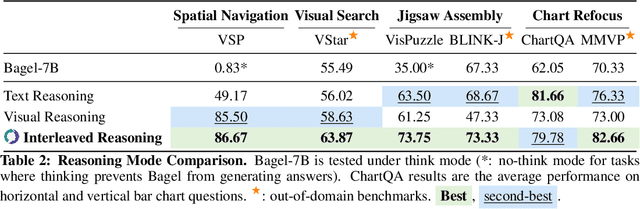
Multimodal reasoning requires iterative coordination between language and vision, yet it remains unclear what constitutes a meaningful interleaved chain of thought. We posit that text and image thoughts should function as complementary, rather than isomorphic, modalities that mutually advance reasoning. Guided by this principle, we build ThinkMorph, a unified model fine-tuned on 24K high-quality interleaved reasoning traces spanning tasks with varying visual engagement. ThinkMorph learns to generate progressive text-image reasoning steps that concretely manipulate visual content while maintaining coherent verbal logic. It delivers large gains on vision-centric benchmarks (averaging 34.7% over the base model) and generalizes to out-of-domain tasks, matching or surpassing larger and proprietary VLMs. Beyond performance, ThinkMorph exhibits emergent multimodal intelligence, including unseen visual manipulation skills, adaptive switching between reasoning modes, and better test-time scaling through diversified multimodal thoughts.These findings suggest promising directions for characterizing the emergent capabilities of unified models for multimodal reasoning.
SHANKS: Simultaneous Hearing and Thinking for Spoken Language Models
Oct 08, 2025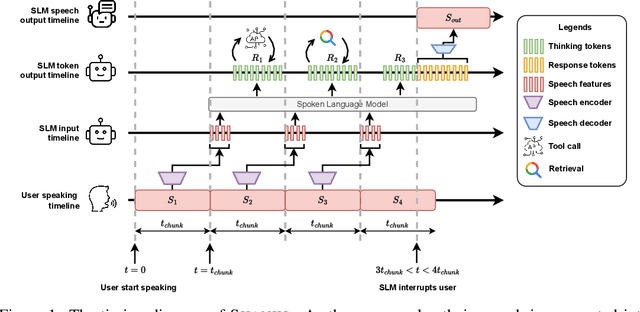
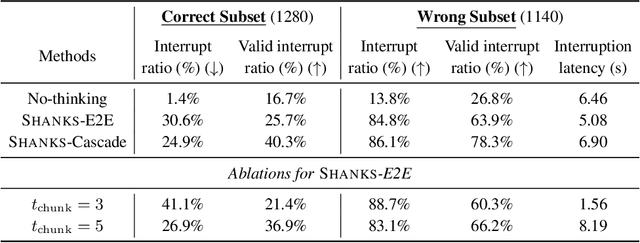

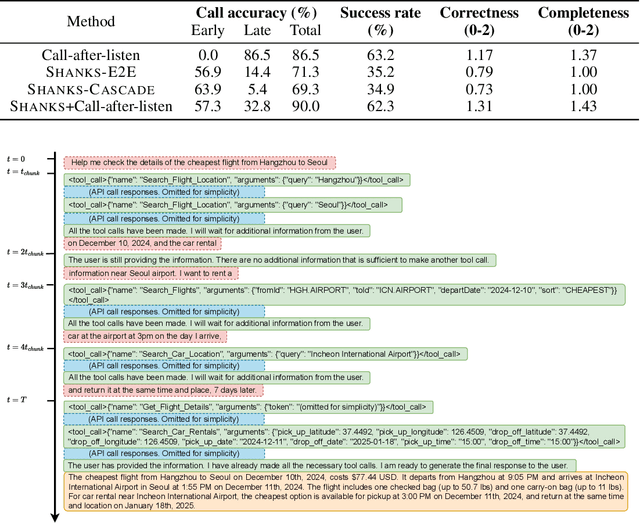
Current large language models (LLMs) and spoken language models (SLMs) begin thinking and taking actions only after the user has finished their turn. This prevents the model from interacting during the user's turn and can lead to high response latency while it waits to think. Consequently, thinking after receiving the full input is not suitable for speech-to-speech interaction, where real-time, low-latency exchange is important. We address this by noting that humans naturally "think while listening." In this paper, we propose SHANKS, a general inference framework that enables SLMs to generate unspoken chain-of-thought reasoning while listening to the user input. SHANKS streams the input speech in fixed-duration chunks and, as soon as a chunk is received, generates unspoken reasoning based on all previous speech and reasoning, while the user continues speaking. SHANKS uses this unspoken reasoning to decide whether to interrupt the user and to make tool calls to complete the task. We demonstrate that SHANKS enhances real-time user-SLM interaction in two scenarios: (1) when the user is presenting a step-by-step solution to a math problem, SHANKS can listen, reason, and interrupt when the user makes a mistake, achieving 37.1% higher interruption accuracy than a baseline that interrupts without thinking; and (2) in a tool-augmented dialogue, SHANKS can complete 56.9% of the tool calls before the user finishes their turn. Overall, SHANKS moves toward models that keep thinking throughout the conversation, not only after a turn ends. Animated illustrations of Shanks can be found at https://d223302.github.io/SHANKS/
ViCrit: A Verifiable Reinforcement Learning Proxy Task for Visual Perception in VLMs
Jun 11, 2025Reinforcement learning (RL) has shown great effectiveness for fine-tuning large language models (LLMs) using tasks that are challenging yet easily verifiable, such as math reasoning or code generation. However, extending this success to visual perception in vision-language models (VLMs) has been impeded by the scarcity of vision-centric tasks that are simultaneously challenging and unambiguously verifiable. To this end, we introduce ViCrit (Visual Caption Hallucination Critic), an RL proxy task that trains VLMs to localize a subtle, synthetic visual hallucination injected into paragraphs of human-written image captions. Starting from a 200-word captions, we inject a single, subtle visual description error-altering a few words on objects, attributes, counts, or spatial relations-and task the model to pinpoint the corrupted span given the image and the modified caption. This formulation preserves the full perceptual difficulty while providing a binary, exact-match reward that is easy to compute and unambiguous. Models trained with the ViCrit Task exhibit substantial gains across a variety of VL benchmarks. Crucially, the improvements transfer beyond natural-image training data to abstract image reasoning and visual math, showing promises of learning to perceive rather than barely memorizing seen objects. To facilitate evaluation, we further introduce ViCrit-Bench, a category-balanced diagnostic benchmark that systematically probes perception errors across diverse image domains and error types. Together, our results demonstrate that fine-grained hallucination criticism is an effective and generalizable objective for enhancing visual perception in VLMs.
Synthetic Visual Genome
Jun 09, 2025Reasoning over visual relationships-spatial, functional, interactional, social, etc.-is considered to be a fundamental component of human cognition. Yet, despite the major advances in visual comprehension in multimodal language models (MLMs), precise reasoning over relationships and their generations remains a challenge. We introduce ROBIN: an MLM instruction-tuned with densely annotated relationships capable of constructing high-quality dense scene graphs at scale. To train ROBIN, we curate SVG, a synthetic scene graph dataset by completing the missing relations of selected objects in existing scene graphs using a teacher MLM and a carefully designed filtering process to ensure high-quality. To generate more accurate and rich scene graphs at scale for any image, we introduce SG-EDIT: a self-distillation framework where GPT-4o further refines ROBIN's predicted scene graphs by removing unlikely relations and/or suggesting relevant ones. In total, our dataset contains 146K images and 5.6M relationships for 2.6M objects. Results show that our ROBIN-3B model, despite being trained on less than 3 million instances, outperforms similar-size models trained on over 300 million instances on relationship understanding benchmarks, and even surpasses larger models up to 13B parameters. Notably, it achieves state-of-the-art performance in referring expression comprehension with a score of 88.9, surpassing the previous best of 87.4. Our results suggest that training on the refined scene graph data is crucial to maintaining high performance across diverse visual reasoning task.
Audio-Aware Large Language Models as Judges for Speaking Styles
Jun 06, 2025Audio-aware large language models (ALLMs) can understand the textual and non-textual information in the audio input. In this paper, we explore using ALLMs as an automatic judge to assess the speaking styles of speeches. We use ALLM judges to evaluate the speeches generated by SLMs on two tasks: voice style instruction following and role-playing. The speaking style we consider includes emotion, volume, speaking pace, word emphasis, pitch control, and non-verbal elements. We use four spoken language models (SLMs) to complete the two tasks and use humans and ALLMs to judge the SLMs' responses. We compare two ALLM judges, GPT-4o-audio and Gemini-2.5-pro, with human evaluation results and show that the agreement between Gemini and human judges is comparable to the agreement between human evaluators. These promising results show that ALLMs can be used as a judge to evaluate SLMs. Our results also reveal that current SLMs, even GPT-4o-audio, still have room for improvement in controlling the speaking style and generating natural dialogues.
Unfolding Spatial Cognition: Evaluating Multimodal Models on Visual Simulations
Jun 05, 2025Spatial cognition is essential for human intelligence, enabling problem-solving through visual simulations rather than solely relying on verbal reasoning. However, existing AI benchmarks primarily assess verbal reasoning, neglecting the complexities of non-verbal, multi-step visual simulation. We introduce STARE(Spatial Transformations and Reasoning Evaluation), a benchmark designed to rigorously evaluate multimodal large language models on tasks better solved through multi-step visual simulation. STARE features 4K tasks spanning foundational geometric transformations (2D and 3D), integrated spatial reasoning (cube net folding and tangram puzzles), and real-world spatial reasoning (perspective and temporal reasoning), reflecting practical cognitive challenges like object assembly, mechanical diagram interpretation, and everyday spatial navigation. Our evaluations show that models excel at reasoning over simpler 2D transformations, but perform close to random chance on more complex tasks like 3D cube net folding and tangram puzzles that require multi-step visual simulations. Humans achieve near-perfect accuracy but take considerable time (up to 28.9s) on complex tasks, significantly speeding up (down by 7.5 seconds on average) with intermediate visual simulations. In contrast, models exhibit inconsistent performance gains from visual simulations, improving on most tasks but declining in specific cases like tangram puzzles (GPT-4o, o1) and cube net folding (Claude-3.5, Gemini-2.0 Flash), indicating that models may not know how to effectively leverage intermediate visual information.