 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe One RING: a Robotic Indoor Navigation Generalist
Dec 18, 2024



Modern robots vary significantly in shape, size, and sensor configurations used to perceive and interact with their environments. However, most navigation policies are embodiment-specific; a policy learned using one robot's configuration does not typically gracefully generalize to another. Even small changes in the body size or camera viewpoint may cause failures. With the recent surge in custom hardware developments, it is necessary to learn a single policy that can be transferred to other embodiments, eliminating the need to (re)train for each specific robot. In this paper, we introduce RING (Robotic Indoor Navigation Generalist), an embodiment-agnostic policy, trained solely in simulation with diverse randomly initialized embodiments at scale. Specifically, we augment the AI2-THOR simulator with the ability to instantiate robot embodiments with controllable configurations, varying across body size, rotation pivot point, and camera configurations. In the visual object-goal navigation task, RING achieves robust performance on real unseen robot platforms (Stretch RE-1, LoCoBot, Unitree's Go1), achieving an average of 72.1% and 78.9% success rate across 5 embodiments in simulation and 4 robot platforms in the real world. (project website: https://one-ring-policy.allen.ai/)
PoliFormer: Scaling On-Policy RL with Transformers Results in Masterful Navigators
Jun 28, 2024



We present PoliFormer (Policy Transformer), an RGB-only indoor navigation agent trained end-to-end with reinforcement learning at scale that generalizes to the real-world without adaptation despite being trained purely in simulation. PoliFormer uses a foundational vision transformer encoder with a causal transformer decoder enabling long-term memory and reasoning. It is trained for hundreds of millions of interactions across diverse environments, leveraging parallelized, multi-machine rollouts for efficient training with high throughput. PoliFormer is a masterful navigator, producing state-of-the-art results across two distinct embodiments, the LoCoBot and Stretch RE-1 robots, and four navigation benchmarks. It breaks through the plateaus of previous work, achieving an unprecedented 85.5% success rate in object goal navigation on the CHORES-S benchmark, a 28.5% absolute improvement. PoliFormer can also be trivially extended to a variety of downstream applications such as object tracking, multi-object navigation, and open-vocabulary navigation with no finetuning.
Holodeck: Language Guided Generation of 3D Embodied AI Environments
Dec 14, 20233D simulated environments play a critical role in Embodied AI, but their creation requires expertise and extensive manual effort, restricting their diversity and scope. To mitigate this limitation, we present Holodeck, a system that generates 3D environments to match a user-supplied prompt fully automatedly. Holodeck can generate diverse scenes, e.g., arcades, spas, and museums, adjust the designs for styles, and can capture the semantics of complex queries such as "apartment for a researcher with a cat" and "office of a professor who is a fan of Star Wars". Holodeck leverages a large language model (GPT-4) for common sense knowledge about what the scene might look like and uses a large collection of 3D assets from Objaverse to populate the scene with diverse objects. To address the challenge of positioning objects correctly, we prompt GPT-4 to generate spatial relational constraints between objects and then optimize the layout to satisfy those constraints. Our large-scale human evaluation shows that annotators prefer Holodeck over manually designed procedural baselines in residential scenes and that Holodeck can produce high-quality outputs for diverse scene types. We also demonstrate an exciting application of Holodeck in Embodied AI, training agents to navigate in novel scenes like music rooms and daycares without human-constructed data, which is a significant step forward in developing general-purpose embodied agents.
Imitating Shortest Paths in Simulation Enables Effective Navigation and Manipulation in the Real World
Dec 05, 2023



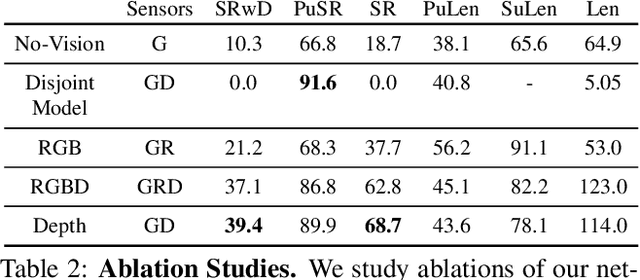
Reinforcement learning (RL) with dense rewards and imitation learning (IL) with human-generated trajectories are the most widely used approaches for training modern embodied agents. RL requires extensive reward shaping and auxiliary losses and is often too slow and ineffective for long-horizon tasks. While IL with human supervision is effective, collecting human trajectories at scale is extremely expensive. In this work, we show that imitating shortest-path planners in simulation produces agents that, given a language instruction, can proficiently navigate, explore, and manipulate objects in both simulation and in the real world using only RGB sensors (no depth map or GPS coordinates). This surprising result is enabled by our end-to-end, transformer-based, SPOC architecture, powerful visual encoders paired with extensive image augmentation, and the dramatic scale and diversity of our training data: millions of frames of shortest-path-expert trajectories collected inside approximately 200,000 procedurally generated houses containing 40,000 unique 3D assets. Our models, data, training code, and newly proposed 10-task benchmarking suite CHORES will be open-sourced.
Ask4Help: Learning to Leverage an Expert for Embodied Tasks
Nov 18, 2022Embodied AI agents continue to become more capable every year with the advent of new models, environments, and benchmarks, but are still far away from being performant and reliable enough to be deployed in real, user-facing, applications. In this paper, we ask: can we bridge this gap by enabling agents to ask for assistance from an expert such as a human being? To this end, we propose the Ask4Help policy that augments agents with the ability to request, and then use expert assistance. Ask4Help policies can be efficiently trained without modifying the original agent's parameters and learn a desirable trade-off between task performance and the amount of requested help, thereby reducing the cost of querying the expert. We evaluate Ask4Help on two different tasks -- object goal navigation and room rearrangement and see substantial improvements in performance using minimal help. On object navigation, an agent that achieves a $52\%$ success rate is raised to $86\%$ with $13\%$ help and for rearrangement, the state-of-the-art model with a $7\%$ success rate is dramatically improved to $90.4\%$ using $39\%$ help. Human trials with Ask4Help demonstrate the efficacy of our approach in practical scenarios. We release the code for Ask4Help here: https://github.com/allenai/ask4help.
ProcTHOR: Large-Scale Embodied AI Using Procedural Generation
Jun 14, 2022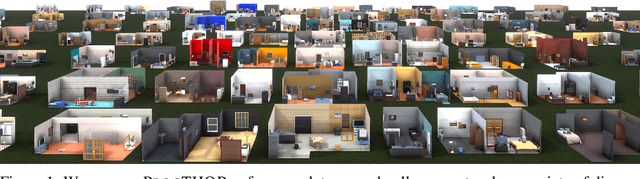

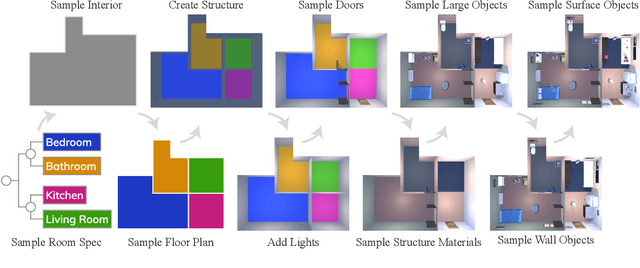
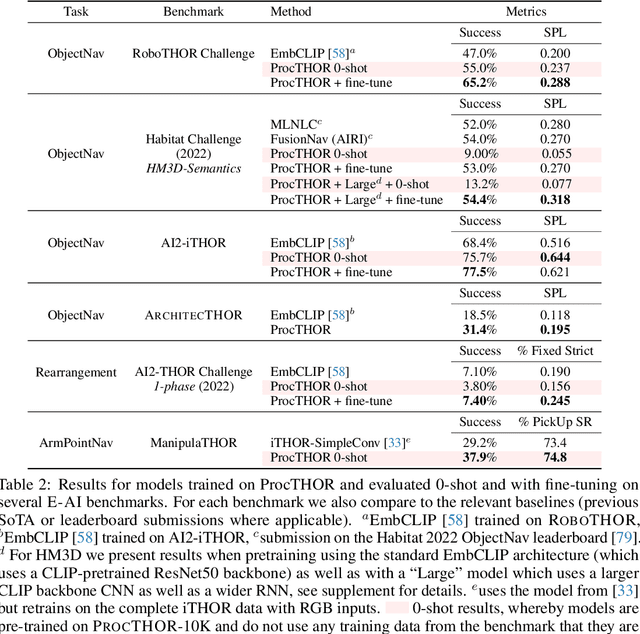
Massive datasets and high-capacity models have driven many recent advancements in computer vision and natural language understanding. This work presents a platform to enable similar success stories in Embodied AI. We propose ProcTHOR, a framework for procedural generation of Embodied AI environments. ProcTHOR enables us to sample arbitrarily large datasets of diverse, interactive, customizable, and performant virtual environments to train and evaluate embodied agents across navigation, interaction, and manipulation tasks. We demonstrate the power and potential of ProcTHOR via a sample of 10,000 generated houses and a simple neural model. Models trained using only RGB images on ProcTHOR, with no explicit mapping and no human task supervision produce state-of-the-art results across 6 embodied AI benchmarks for navigation, rearrangement, and arm manipulation, including the presently running Habitat 2022, AI2-THOR Rearrangement 2022, and RoboTHOR challenges. We also demonstrate strong 0-shot results on these benchmarks, via pre-training on ProcTHOR with no fine-tuning on the downstream benchmark, often beating previous state-of-the-art systems that access the downstream training data.
Iconary: A Pictionary-Based Game for Testing Multimodal Communication with Drawings and Text
Dec 01, 2021Communicating with humans is challenging for AIs because it requires a shared understanding of the world, complex semantics (e.g., metaphors or analogies), and at times multi-modal gestures (e.g., pointing with a finger, or an arrow in a diagram). We investigate these challenges in the context of Iconary, a collaborative game of drawing and guessing based on Pictionary, that poses a novel challenge for the research community. In Iconary, a Guesser tries to identify a phrase that a Drawer is drawing by composing icons, and the Drawer iteratively revises the drawing to help the Guesser in response. This back-and-forth often uses canonical scenes, visual metaphor, or icon compositions to express challenging words, making it an ideal test for mixing language and visual/symbolic communication in AI. We propose models to play Iconary and train them on over 55,000 games between human players. Our models are skillful players and are able to employ world knowledge in language models to play with words unseen during training. Elite human players outperform our models, particularly at the drawing task, leaving an important gap for future research to address. We release our dataset, code, and evaluation setup as a challenge to the community at http://www.github.com/allenai/iconary.
ManipulaTHOR: A Framework for Visual Object Manipulation
Apr 22, 2021
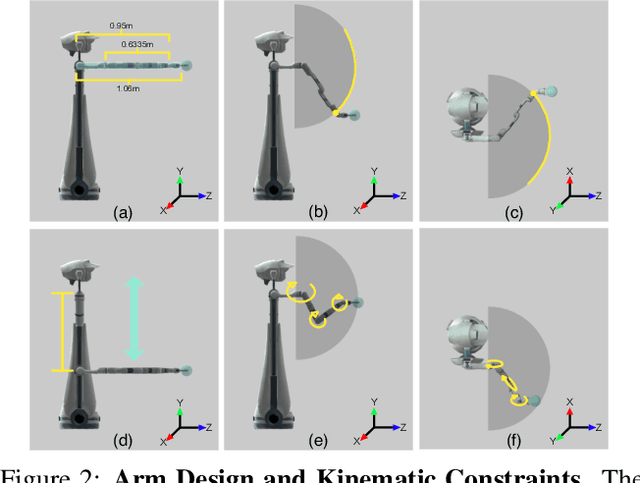
The domain of Embodied AI has recently witnessed substantial progress, particularly in navigating agents within their environments. These early successes have laid the building blocks for the community to tackle tasks that require agents to actively interact with objects in their environment. Object manipulation is an established research domain within the robotics community and poses several challenges including manipulator motion, grasping and long-horizon planning, particularly when dealing with oft-overlooked practical setups involving visually rich and complex scenes, manipulation using mobile agents (as opposed to tabletop manipulation), and generalization to unseen environments and objects. We propose a framework for object manipulation built upon the physics-enabled, visually rich AI2-THOR framework and present a new challenge to the Embodied AI community known as ArmPointNav. This task extends the popular point navigation task to object manipulation and offers new challenges including 3D obstacle avoidance, manipulating objects in the presence of occlusion, and multi-object manipulation that necessitates long term planning. Popular learning paradigms that are successful on PointNav challenges show promise, but leave a large room for improvement.
RoboTHOR: An Open Simulation-to-Real Embodied AI Platform
Apr 14, 2020

Visual recognition ecosystems (e.g. ImageNet, Pascal, COCO) have undeniably played a prevailing role in the evolution of modern computer vision. We argue that interactive and embodied visual AI has reached a stage of development similar to visual recognition prior to the advent of these ecosystems. Recently, various synthetic environments have been introduced to facilitate research in embodied AI. Notwithstanding this progress, the crucial question of how well models trained in simulation generalize to reality has remained largely unanswered. The creation of a comparable ecosystem for simulation-to-real embodied AI presents many challenges: (1) the inherently interactive nature of the problem, (2) the need for tight alignments between real and simulated worlds, (3) the difficulty of replicating physical conditions for repeatable experiments, (4) and the associated cost. In this paper, we introduce RoboTHOR to democratize research in interactive and embodied visual AI. RoboTHOR offers a framework of simulated environments paired with physical counterparts to systematically explore and overcome the challenges of simulation-to-real transfer, and a platform where researchers across the globe can remotely test their embodied models in the physical world. As a first benchmark, our experiments show there exists a significant gap between the performance of models trained in simulation when they are tested in both simulations and their carefully constructed physical analogs. We hope that RoboTHOR will spur the next stage of evolution in embodied computer vision. RoboTHOR can be accessed at the following link: https://ai2thor.allenai.org/robothor
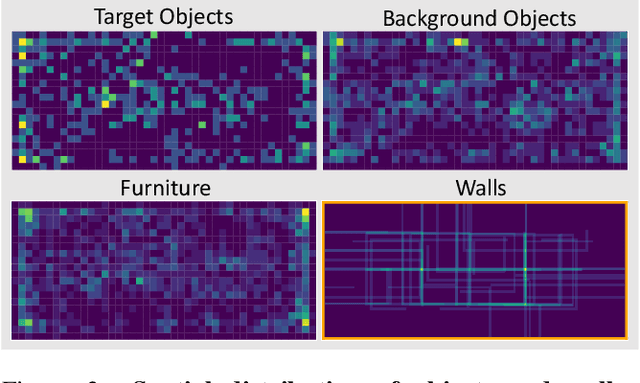
Artificial Agents Learn Flexible Visual Representations by Playing a Hiding Game
Dec 18, 2019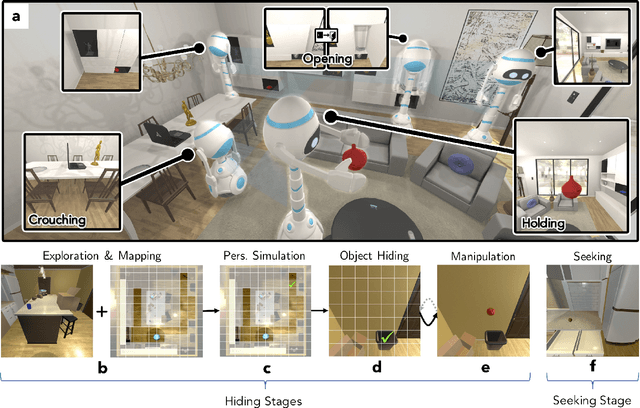
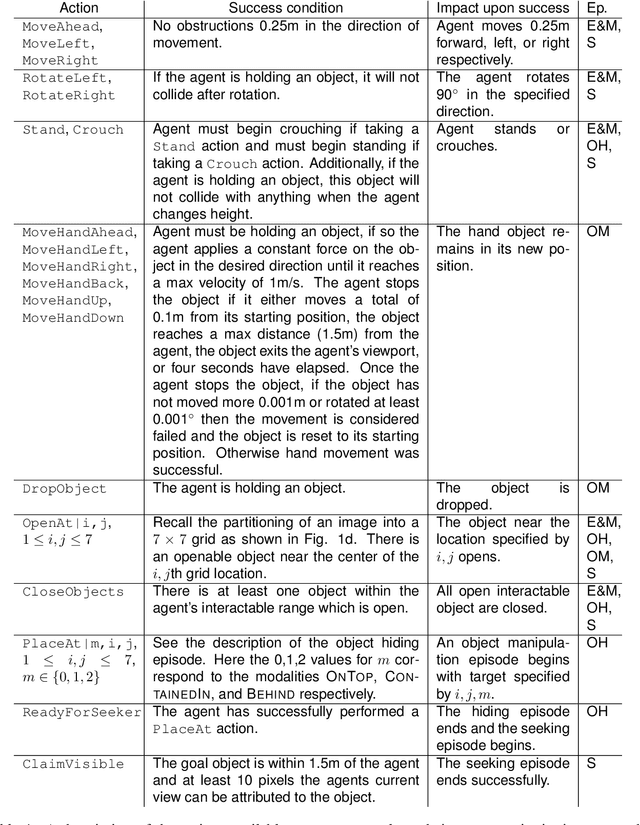
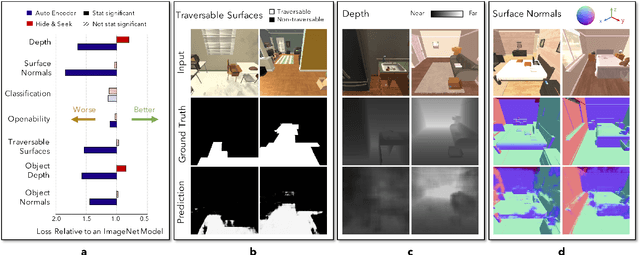
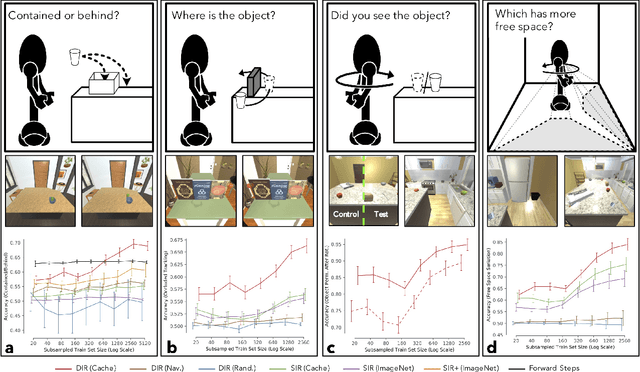
The ubiquity of embodied gameplay, observed in a wide variety of animal species including turtles and ravens, has led researchers to question what advantages play provides to the animals engaged in it. Mounting evidence suggests that play is critical in developing the neural flexibility for creative problem solving, socialization, and can improve the plasticity of the medial prefrontal cortex. Comparatively little is known regarding the impact of gameplay upon embodied artificial agents. While recent work has produced artificial agents proficient in abstract games, the environments these agents act within are far removed the real world and thus these agents provide little insight into the advantages of embodied play. Hiding games have arisen in multiple cultures and species, and provide a rich ground for studying the impact of embodied gameplay on representation learning in the context of perspective taking, secret keeping, and false belief understanding. Here we are the first to show that embodied adversarial reinforcement learning agents playing cache, a variant of hide-and-seek, in a high fidelity, interactive, environment, learn representations of their observations encoding information such as occlusion, object permanence, free space, and containment; on par with representations learnt by the most popular modern paradigm for visual representation learning which requires large datasets independently labeled for each new task. Our representations are enhanced by intent and memory, through interaction and play, moving closer to biologically motivated learning strategies. These results serve as a model for studying how facets of vision and perspective taking develop through play, provide an experimental framework for assessing what is learned by artificial agents, and suggest that representation learning should move from static datasets and towards experiential, interactive, learning.