 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitating Shortest Paths in Simulation Enables Effective Navigation and Manipulation in the Real World
Dec 05, 2023



Reinforcement learning (RL) with dense rewards and imitation learning (IL) with human-generated trajectories are the most widely used approaches for training modern embodied agents. RL requires extensive reward shaping and auxiliary losses and is often too slow and ineffective for long-horizon tasks. While IL with human supervision is effective, collecting human trajectories at scale is extremely expensive. In this work, we show that imitating shortest-path planners in simulation produces agents that, given a language instruction, can proficiently navigate, explore, and manipulate objects in both simulation and in the real world using only RGB sensors (no depth map or GPS coordinates). This surprising result is enabled by our end-to-end, transformer-based, SPOC architecture, powerful visual encoders paired with extensive image augmentation, and the dramatic scale and diversity of our training data: millions of frames of shortest-path-expert trajectories collected inside approximately 200,000 procedurally generated houses containing 40,000 unique 3D assets. Our models, data, training code, and newly proposed 10-task benchmarking suite CHORES will be open-sourced.
A General Purpose Supervisory Signal for Embodied Agents
Dec 01, 2022



Training effective embodied AI agents often involves manual reward engineering, expert imitation, specialized components such as maps, or leveraging additional sensors for depth and localization. Another approach is to use neural architectures alongside self-supervised objectives which encourage better representation learning. In practice, there are few guarantees that these self-supervised objectives encode task-relevant information. We propose the Scene Graph Contrastive (SGC) loss, which uses scene graphs as general-purpose, training-only, supervisory signals. The SGC loss does away with explicit graph decoding and instead uses contrastive learning to align an agent's representation with a rich graphical encoding of its environment. The SGC loss is generally applicable, simple to implement, and encourages representations that encode objects' semantics, relationships, and history. Using the SGC loss, we attain significant gains on three embodied tasks: Object Navigation, Multi-Object Navigation, and Arm Point Navigation. Finally, we present studies and analyses which demonstrate the ability of our trained representation to encode semantic cues about the environment.
Ask4Help: Learning to Leverage an Expert for Embodied Tasks
Nov 18, 2022Embodied AI agents continue to become more capable every year with the advent of new models, environments, and benchmarks, but are still far away from being performant and reliable enough to be deployed in real, user-facing, applications. In this paper, we ask: can we bridge this gap by enabling agents to ask for assistance from an expert such as a human being? To this end, we propose the Ask4Help policy that augments agents with the ability to request, and then use expert assistance. Ask4Help policies can be efficiently trained without modifying the original agent's parameters and learn a desirable trade-off between task performance and the amount of requested help, thereby reducing the cost of querying the expert. We evaluate Ask4Help on two different tasks -- object goal navigation and room rearrangement and see substantial improvements in performance using minimal help. On object navigation, an agent that achieves a $52\%$ success rate is raised to $86\%$ with $13\%$ help and for rearrangement, the state-of-the-art model with a $7\%$ success rate is dramatically improved to $90.4\%$ using $39\%$ help. Human trials with Ask4Help demonstrate the efficacy of our approach in practical scenarios. We release the code for Ask4Help here: https://github.com/allenai/ask4help.
BNAS v2: Learning Architectures for Binary Networks with Empirical Improvements
Oct 16, 2021



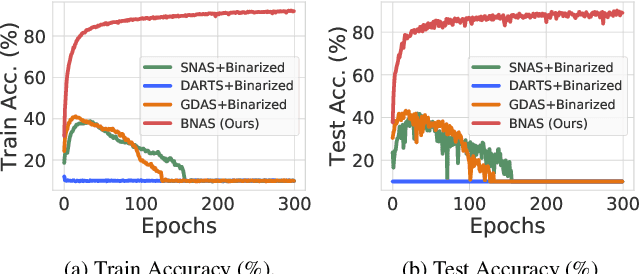
Backbone architectures of most binary networks are well-known floating point (FP) architectures such as the ResNet family. Questioning that the architectures designed for FP networks might not be the best for binary networks, we propose to search architectures for binary networks (BNAS) by defining a new search space for binary architectures and a novel search objective. Specifically, based on the cell based search method, we define the new search space of binary layer types, design a new cell template, and rediscover the utility of and propose to use the Zeroise layer instead of using it as a placeholder. The novel search objective diversifies early search to learn better performing binary architectures. We show that our method searches architectures with stable training curves despite the quantization error inherent in binary networks. Quantitative analyses demonstrate that our searched architectures outperform the architectures used in state-of-the-art binary networks and outperform or perform on par with state-of-the-art binary networks that employ various techniques other than architectural changes. In addition, we further propose improvements to the training scheme of our searched architectures. With the new training scheme for our searched architectures, we achieve the state-of-the-art performance by binary networks by outperforming all previous methods by non-trivial margins.
MOCA: A Modular Object-Centric Approach for Interactive Instruction Following
Dec 06, 2020



Performing simple household tasks based on language directives is very natural to humans, yet it remains an open challenge for an AI agent. Recently, an `interactive instruction following' task has been proposed to foster research in reasoning over long instruction sequences that requires object interactions in a simulated environment. It involves solving open problems in vision, language and navigation literature at each step. To address this multifaceted problem, we propose a modular architecture that decouples the task into visual perception and action policy, and name it as MOCA, a Modular Object-Centric Approach. We evaluate our method on the ALFRED benchmark and empirically validate that it outperforms prior arts by significant margins in all metrics with good generalization performance (high success rate in unseen environments). Our code is available at https://github.com/gistvision/moca.
Learning Architectures for Binary Networks
Feb 17, 2020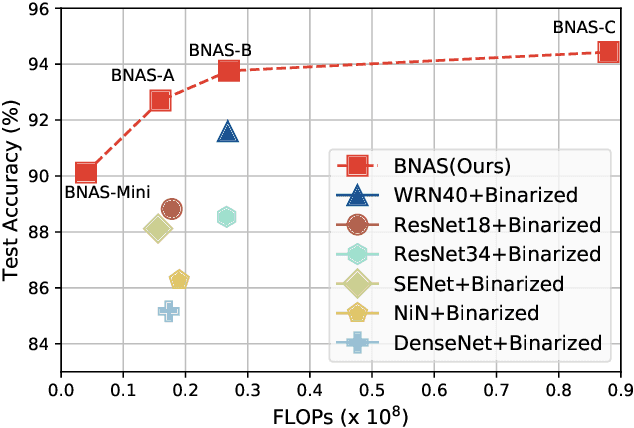
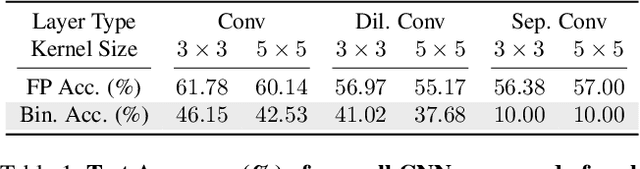
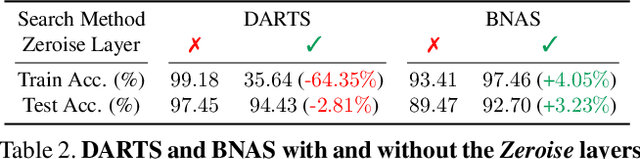
Backbone architectures of most binary networks are well-known floating point architectures, such as the ResNet family. Questioning that the architectures designed for floating-point networks would not be the best for binary networks, we propose to search architectures for binary networks (BNAS). Specifically, based on the cell based search method, we define a new set of layer types, design a new cell template, and rediscover the utility of and propose to use the Zeroise layer to learn well-performing binary networks. In addition, we propose to diversify early search to learn better performing binary architectures. We show that our searched binary networks outperform state-of-the-art binary networks on CIFAR10 and ImageNet datasets.