 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Non-Causal Factors for Transformer-Based Source-Free Domain Adaptation
Nov 27, 2023
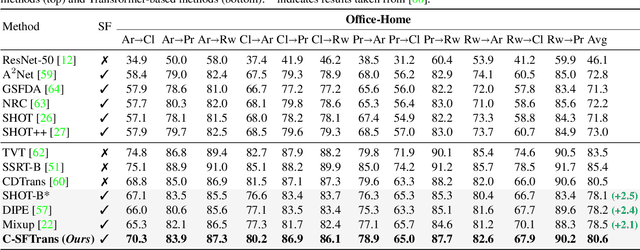


Conventional domain adaptation algorithms aim to achieve better generalization by aligning only the task-discriminative causal factors between a source and target domain. However, we find that retaining the spurious correlation between causal and non-causal factors plays a vital role in bridging the domain gap and improving target adaptation. Therefore, we propose to build a framework that disentangles and supports causal factor alignment by aligning the non-causal factors first. We also investigate and find that the strong shape bias of vision transformers, coupled with its multi-head attention, make it a suitable architecture for realizing our proposed disentanglement. Hence, we propose to build a Causality-enforcing Source-Free Transformer framework (C-SFTrans) to achieve disentanglement via a novel two-stage alignment approach: a) non-causal factor alignment: non-causal factors are aligned using a style classification task which leads to an overall global alignment, b) task-discriminative causal factor alignment: causal factors are aligned via target adaptation. We are the first to investigate the role of vision transformers (ViTs) in a privacy-preserving source-free setting. Our approach achieves state-of-the-art results in several DA benchmarks.
Domain-Specificity Inducing Transformers for Source-Free Domain Adaptation
Aug 27, 2023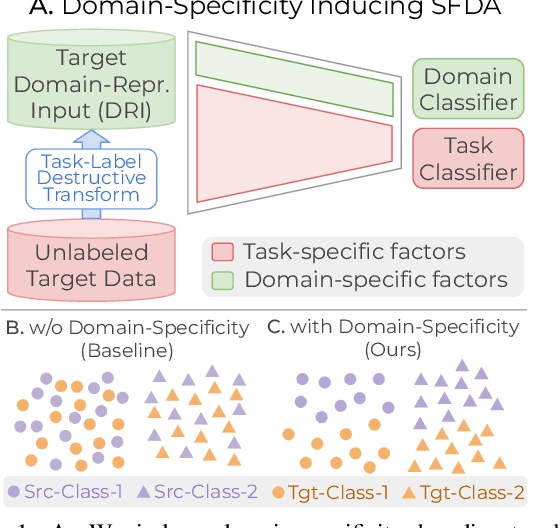
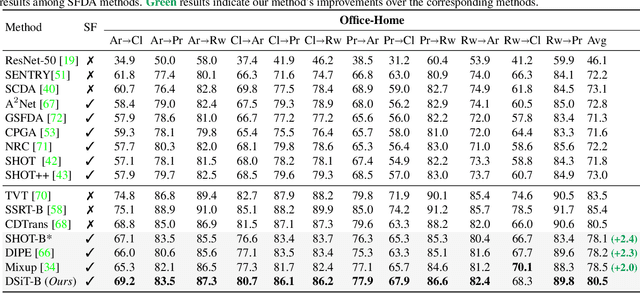
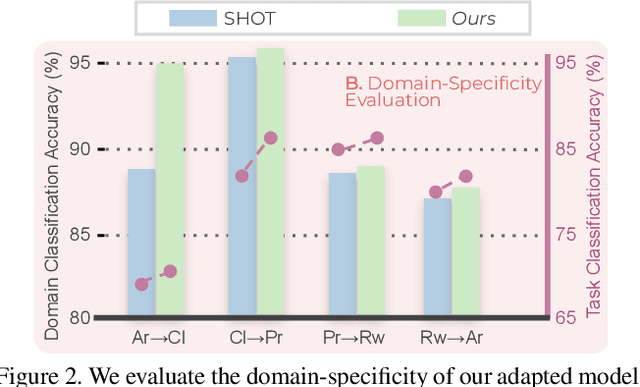

Conventional Domain Adaptation (DA) methods aim to learn domain-invariant feature representations to improve the target adaptation performance. However, we motivate that domain-specificity is equally important since in-domain trained models hold crucial domain-specific properties that are beneficial for adaptation. Hence, we propose to build a framework that supports disentanglement and learning of domain-specific factors and task-specific factors in a unified model. Motivated by the success of vision transformers in several multi-modal vision problems, we find that queries could be leveraged to extract the domain-specific factors. Hence, we propose a novel Domain-specificity-inducing Transformer (DSiT) framework for disentangling and learning both domain-specific and task-specific factors. To achieve disentanglement, we propose to construct novel Domain-Representative Inputs (DRI) with domain-specific information to train a domain classifier with a novel domain token. We are the first to utilize vision transformers for domain adaptation in a privacy-oriented source-free setting, and our approach achieves state-of-the-art performance on single-source, multi-source, and multi-target benchmarks
Multi-Level Compositional Reasoning for Interactive Instruction Following
Aug 18, 2023Robotic agents performing domestic chores by natural language directives are required to master the complex job of navigating environment and interacting with objects in the environments. The tasks given to the agents are often composite thus are challenging as completing them require to reason about multiple subtasks, e.g., bring a cup of coffee. To address the challenge, we propose to divide and conquer it by breaking the task into multiple subgoals and attend to them individually for better navigation and interaction. We call it Multi-level Compositional Reasoning Agent (MCR-Agent). Specifically, we learn a three-level action policy. At the highest level, we infer a sequence of human-interpretable subgoals to be executed based on language instructions by a high-level policy composition controller. At the middle level, we discriminatively control the agent's navigation by a master policy by alternating between a navigation policy and various independent interaction policies. Finally, at the lowest level, we infer manipulation actions with the corresponding object masks using the appropriate interaction policy. Our approach not only generates human interpretable subgoals but also achieves 2.03% absolute gain to comparable state of the arts in the efficiency metric (PLWSR in unseen set) without using rule-based planning or a semantic spatial memory.
Subsidiary Prototype Alignment for Universal Domain Adaptation
Oct 28, 2022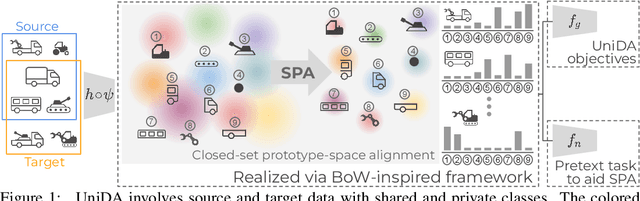
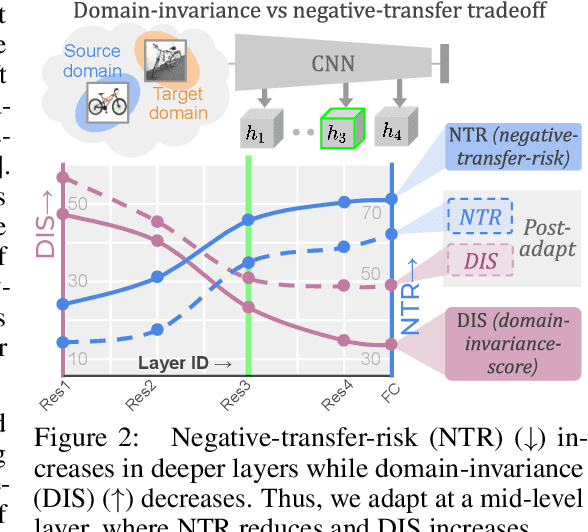
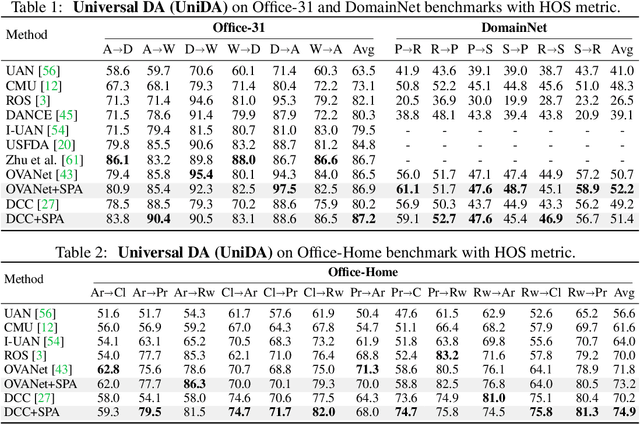
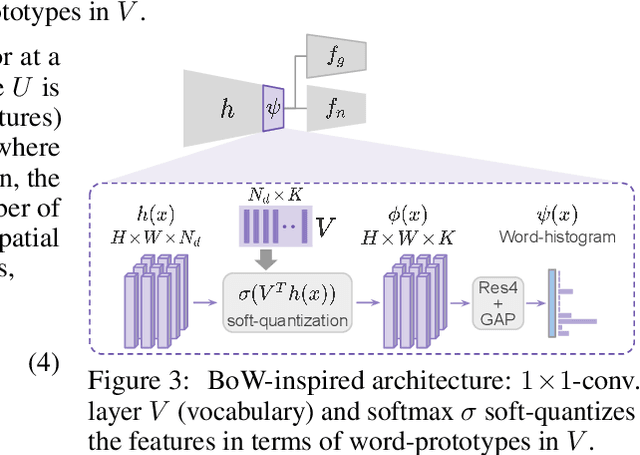
Universal Domain Adaptation (UniDA) deals with the problem of knowledge transfer between two datasets with domain-shift as well as category-shift. The goal is to categorize unlabeled target samples, either into one of the "known" categories or into a single "unknown" category. A major problem in UniDA is negative transfer, i.e. misalignment of "known" and "unknown" classes. To this end, we first uncover an intriguing tradeoff between negative-transfer-risk and domain-invariance exhibited at different layers of a deep network. It turns out we can strike a balance between these two metrics at a mid-level layer. Towards designing an effective framework based on this insight, we draw motivation from Bag-of-visual-Words (BoW). Word-prototypes in a BoW-like representation of a mid-level layer would represent lower-level visual primitives that are likely to be unaffected by the category-shift in the high-level features. We develop modifications that encourage learning of word-prototypes followed by word-histogram based classification. Following this, subsidiary prototype-space alignment (SPA) can be seen as a closed-set alignment problem, thereby avoiding negative transfer. We realize this with a novel word-histogram-related pretext task to enable closed-set SPA, operating in conjunction with goal task UniDA. We demonstrate the efficacy of our approach on top of existing UniDA techniques, yielding state-of-the-art performance across three standard UniDA and Open-Set DA object recognition benchmarks.
Concurrent Subsidiary Supervision for Unsupervised Source-Free Domain Adaptation
Jul 27, 2022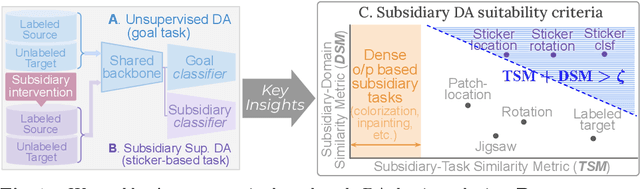
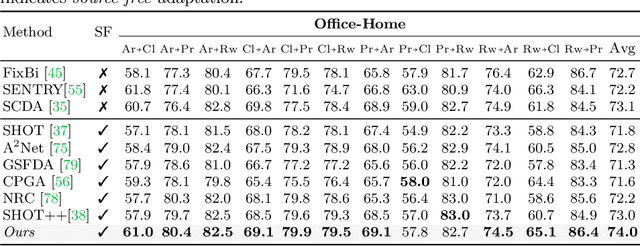
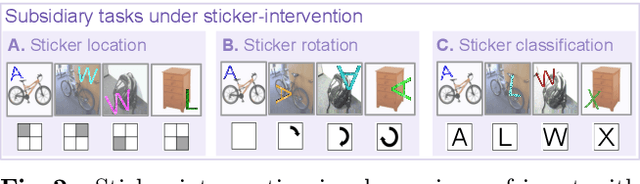
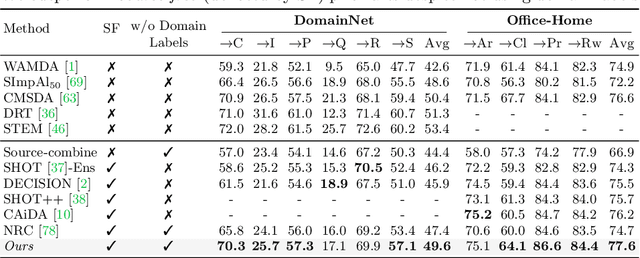
The prime challenge in unsupervised domain adaptation (DA) is to mitigate the domain shift between the source and target domains. Prior DA works show that pretext tasks could be used to mitigate this domain shift by learning domain invariant representations. However, in practice, we find that most existing pretext tasks are ineffective against other established techniques. Thus, we theoretically analyze how and when a subsidiary pretext task could be leveraged to assist the goal task of a given DA problem and develop objective subsidiary task suitability criteria. Based on this criteria, we devise a novel process of sticker intervention and cast sticker classification as a supervised subsidiary DA problem concurrent to the goal task unsupervised DA. Our approach not only improves goal task adaptation performance, but also facilitates privacy-oriented source-free DA i.e. without concurrent source-target access. Experiments on the standard Office-31, Office-Home, DomainNet, and VisDA benchmarks demonstrate our superiority for both single-source and multi-source source-free DA. Our approach also complements existing non-source-free works, achieving leading performance.
Balancing Discriminability and Transferability for Source-Free Domain Adaptation
Jun 16, 2022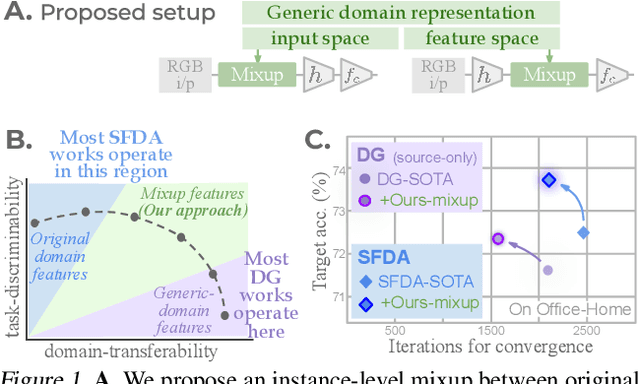
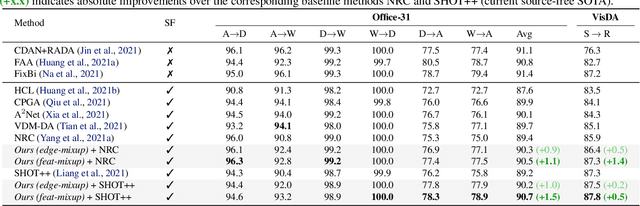
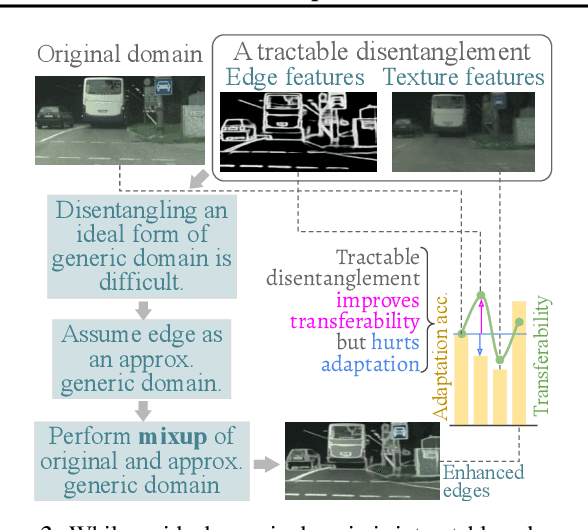
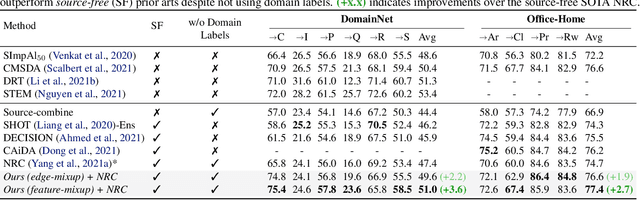
Conventional domain adaptation (DA) techniques aim to improve domain transferability by learning domain-invariant representations; while concurrently preserving the task-discriminability knowledge gathered from the labeled source data. However, the requirement of simultaneous access to labeled source and unlabeled target renders them unsuitable for the challenging source-free DA setting. The trivial solution of realizing an effective original to generic domain mapping improves transferability but degrades task discriminability. Upon analyzing the hurdles from both theoretical and empirical standpoints, we derive novel insights to show that a mixup between original and corresponding translated generic samples enhances the discriminability-transferability trade-off while duly respecting the privacy-oriented source-free setting. A simple but effective realization of the proposed insights on top of the existing source-free DA approaches yields state-of-the-art performance with faster convergence. Beyond single-source, we also outperform multi-source prior-arts across both classification and semantic segmentation benchmarks.
Amplitude Spectrum Transformation for Open Compound Domain Adaptive Semantic Segmentation
Feb 09, 2022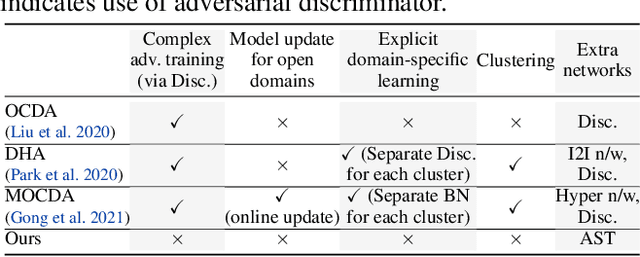
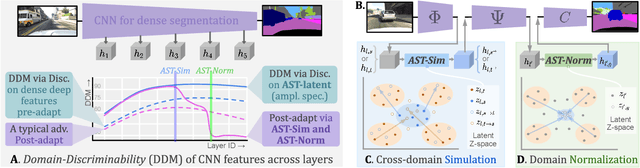
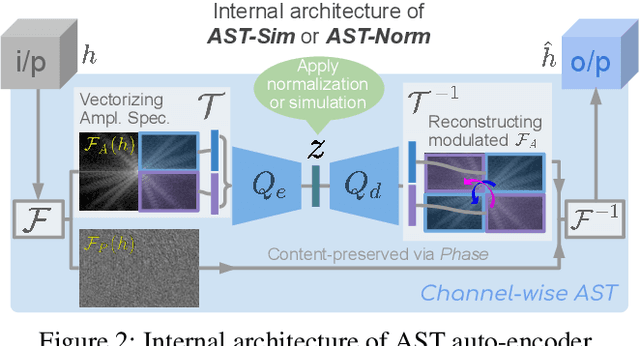
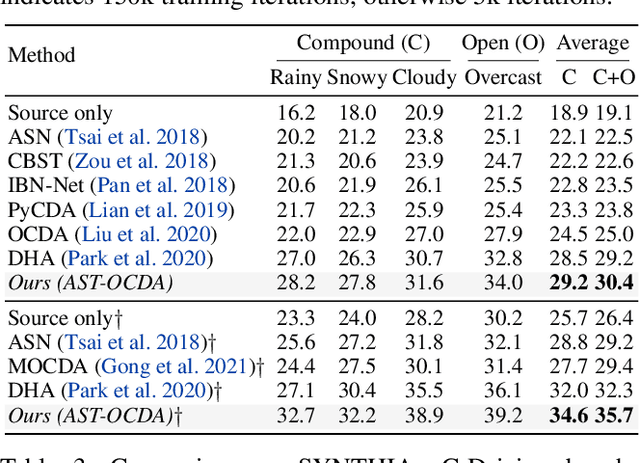
Open compound domain adaptation (OCDA) has emerged as a practical adaptation setting which considers a single labeled source domain against a compound of multi-modal unlabeled target data in order to generalize better on novel unseen domains. We hypothesize that an improved disentanglement of domain-related and task-related factors of dense intermediate layer features can greatly aid OCDA. Prior-arts attempt this indirectly by employing adversarial domain discriminators on the spatial CNN output. However, we find that latent features derived from the Fourier-based amplitude spectrum of deep CNN features hold a more tractable mapping with domain discrimination. Motivated by this, we propose a novel feature space Amplitude Spectrum Transformation (AST). During adaptation, we employ the AST auto-encoder for two purposes. First, carefully mined source-target instance pairs undergo a simulation of cross-domain feature stylization (AST-Sim) at a particular layer by altering the AST-latent. Second, AST operating at a later layer is tasked to normalize (AST-Norm) the domain content by fixing its latent to a mean prototype. Our simplified adaptation technique is not only clustering-free but also free from complex adversarial alignment. We achieve leading performance against the prior arts on the OCDA scene segmentation benchmarks.
MOCA: A Modular Object-Centric Approach for Interactive Instruction Following
Dec 06, 2020



Performing simple household tasks based on language directives is very natural to humans, yet it remains an open challenge for an AI agent. Recently, an `interactive instruction following' task has been proposed to foster research in reasoning over long instruction sequences that requires object interactions in a simulated environment. It involves solving open problems in vision, language and navigation literature at each step. To address this multifaceted problem, we propose a modular architecture that decouples the task into visual perception and action policy, and name it as MOCA, a Modular Object-Centric Approach. We evaluate our method on the ALFRED benchmark and empirically validate that it outperforms prior arts by significant margins in all metrics with good generalization performance (high success rate in unseen environments). Our code is available at https://github.com/gistvision/moca.