 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe One RING: a Robotic Indoor Navigation Generalist
Dec 18, 2024



Modern robots vary significantly in shape, size, and sensor configurations used to perceive and interact with their environments. However, most navigation policies are embodiment-specific; a policy learned using one robot's configuration does not typically gracefully generalize to another. Even small changes in the body size or camera viewpoint may cause failures. With the recent surge in custom hardware developments, it is necessary to learn a single policy that can be transferred to other embodiments, eliminating the need to (re)train for each specific robot. In this paper, we introduce RING (Robotic Indoor Navigation Generalist), an embodiment-agnostic policy, trained solely in simulation with diverse randomly initialized embodiments at scale. Specifically, we augment the AI2-THOR simulator with the ability to instantiate robot embodiments with controllable configurations, varying across body size, rotation pivot point, and camera configurations. In the visual object-goal navigation task, RING achieves robust performance on real unseen robot platforms (Stretch RE-1, LoCoBot, Unitree's Go1), achieving an average of 72.1% and 78.9% success rate across 5 embodiments in simulation and 4 robot platforms in the real world. (project website: https://one-ring-policy.allen.ai/)
SAT: Spatial Aptitude Training for Multimodal Language Models
Dec 10, 2024



Spatial perception is a fundamental component of intelligence. While many studies highlight that large multimodal language models (MLMs) struggle to reason about space, they only test for static spatial reasoning, such as categorizing the relative positions of objects. Meanwhile, real-world deployment requires dynamic capabilities like perspective-taking and egocentric action recognition. As a roadmap to improving spatial intelligence, we introduce SAT, Spatial Aptitude Training, which goes beyond static relative object position questions to the more dynamic tasks. SAT contains 218K question-answer pairs for 22K synthetic scenes across a training and testing set. Generated using a photo-realistic physics engine, our dataset can be arbitrarily scaled and easily extended to new actions, scenes, and 3D assets. We find that even MLMs that perform relatively well on static questions struggle to accurately answer dynamic spatial questions. Further, we show that SAT instruction-tuning data improves not only dynamic spatial reasoning on SAT, but also zero-shot performance on existing real-image spatial benchmarks: $23\%$ on CVBench, $8\%$ on the harder BLINK benchmark, and $18\%$ on VSR. When instruction-tuned on SAT, our 13B model matches larger proprietary MLMs like GPT4-V and Gemini-3-1.0 in spatial reasoning. Our data/code is available at http://arijitray1993.github.io/SAT/ .
Molmo and PixMo: Open Weights and Open Data for State-of-the-Art Multimodal Models
Sep 25, 2024



Today's most advanced multimodal models remain proprietary. The strongest open-weight models rely heavily on synthetic data from proprietary VLMs to achieve good performance, effectively distilling these closed models into open ones. As a result, the community is still missing foundational knowledge about how to build performant VLMs from scratch. We present Molmo, a new family of VLMs that are state-of-the-art in their class of openness. Our key innovation is a novel, highly detailed image caption dataset collected entirely from human annotators using speech-based descriptions. To enable a wide array of user interactions, we also introduce a diverse dataset mixture for fine-tuning that includes in-the-wild Q&A and innovative 2D pointing data. The success of our approach relies on careful choices for the model architecture details, a well-tuned training pipeline, and, most critically, the quality of our newly collected datasets, all of which will be released. The best-in-class 72B model within the Molmo family not only outperforms others in the class of open weight and data models but also compares favorably against proprietary systems like GPT-4o, Claude 3.5, and Gemini 1.5 on both academic benchmarks and human evaluation. We will be releasing all of our model weights, captioning and fine-tuning data, and source code in the near future. Select model weights, inference code, and demo are available at https://molmo.allenai.org.
PoliFormer: Scaling On-Policy RL with Transformers Results in Masterful Navigators
Jun 28, 2024



We present PoliFormer (Policy Transformer), an RGB-only indoor navigation agent trained end-to-end with reinforcement learning at scale that generalizes to the real-world without adaptation despite being trained purely in simulation. PoliFormer uses a foundational vision transformer encoder with a causal transformer decoder enabling long-term memory and reasoning. It is trained for hundreds of millions of interactions across diverse environments, leveraging parallelized, multi-machine rollouts for efficient training with high throughput. PoliFormer is a masterful navigator, producing state-of-the-art results across two distinct embodiments, the LoCoBot and Stretch RE-1 robots, and four navigation benchmarks. It breaks through the plateaus of previous work, achieving an unprecedented 85.5% success rate in object goal navigation on the CHORES-S benchmark, a 28.5% absolute improvement. PoliFormer can also be trivially extended to a variety of downstream applications such as object tracking, multi-object navigation, and open-vocabulary navigation with no finetuning.
Manipulate-Anything: Automating Real-World Robots using Vision-Language Models
Jun 27, 2024Large-scale endeavors like RT-1 and widespread community efforts such as Open-X-Embodiment have contributed to growing the scale of robot demonstration data. However, there is still an opportunity to improve the quality, quantity, and diversity of robot demonstration data. Although vision-language models have been shown to automatically generate demonstration data, their utility has been limited to environments with privileged state information, they require hand-designed skills, and are limited to interactions with few object instances. We propose Manipulate-Anything, a scalable automated generation method for real-world robotic manipulation. Unlike prior work, our method can operate in real-world environments without any privileged state information, hand-designed skills, and can manipulate any static object. We evaluate our method using two setups. First, Manipulate-Anything successfully generates trajectories for all 5 real-world and 12 simulation tasks, significantly outperforming existing methods like VoxPoser. Second, Manipulate-Anything's demonstrations can train more robust behavior cloning policies than training with human demonstrations, or from data generated by VoxPoser and Code-As-Policies. We believe \methodLong\ can be the scalable method for both generating data for robotics and solving novel tasks in a zero-shot setting.
Promptable Behaviors: Personalizing Multi-Objective Rewards from Human Preferences
Dec 14, 2023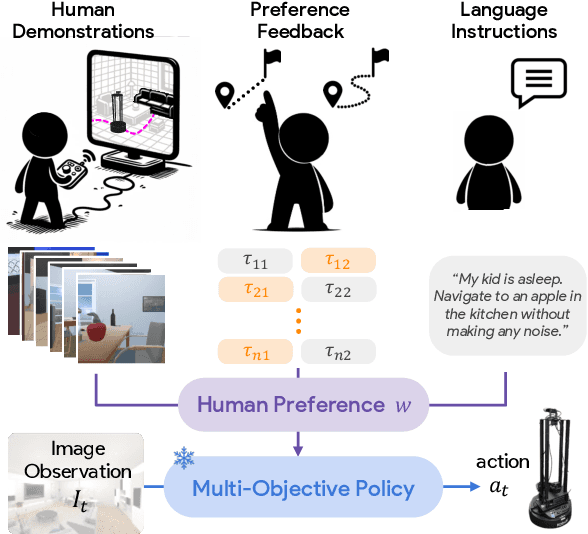
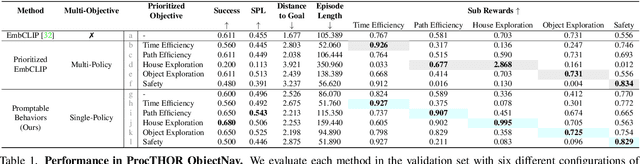
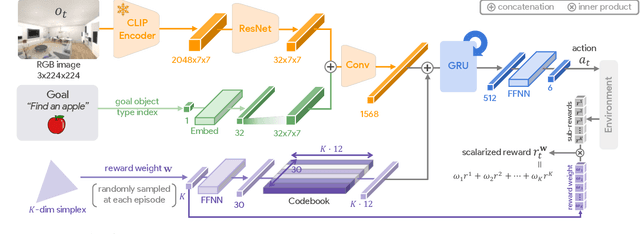

Customizing robotic behaviors to be aligned with diverse human preferences is an underexplored challenge in the field of embodied AI. In this paper, we present Promptable Behaviors, a novel framework that facilitates efficient personalization of robotic agents to diverse human preferences in complex environments. We use multi-objective reinforcement learning to train a single policy adaptable to a broad spectrum of preferences. We introduce three distinct methods to infer human preferences by leveraging different types of interactions: (1) human demonstrations, (2) preference feedback on trajectory comparisons, and (3) language instructions. We evaluate the proposed method in personalized object-goal navigation and flee navigation tasks in ProcTHOR and RoboTHOR, demonstrating the ability to prompt agent behaviors to satisfy human preferences in various scenarios. Project page: https://promptable-behaviors.github.io
Harmonic Mobile Manipulation
Dec 11, 2023



Recent advancements in robotics have enabled robots to navigate complex scenes or manipulate diverse objects independently. However, robots are still impotent in many household tasks requiring coordinated behaviors such as opening doors. The factorization of navigation and manipulation, while effective for some tasks, fails in scenarios requiring coordinated actions. To address this challenge, we introduce, HarmonicMM, an end-to-end learning method that optimizes both navigation and manipulation, showing notable improvement over existing techniques in everyday tasks. This approach is validated in simulated and real-world environments and adapts to novel unseen settings without additional tuning. Our contributions include a new benchmark for mobile manipulation and the successful deployment in a real unseen apartment, demonstrating the potential for practical indoor robot deployment in daily life. More results are on our project site: https://rchalyang.github.io/HarmonicMM/
Imitating Shortest Paths in Simulation Enables Effective Navigation and Manipulation in the Real World
Dec 05, 2023



Reinforcement learning (RL) with dense rewards and imitation learning (IL) with human-generated trajectories are the most widely used approaches for training modern embodied agents. RL requires extensive reward shaping and auxiliary losses and is often too slow and ineffective for long-horizon tasks. While IL with human supervision is effective, collecting human trajectories at scale is extremely expensive. In this work, we show that imitating shortest-path planners in simulation produces agents that, given a language instruction, can proficiently navigate, explore, and manipulate objects in both simulation and in the real world using only RGB sensors (no depth map or GPS coordinates). This surprising result is enabled by our end-to-end, transformer-based, SPOC architecture, powerful visual encoders paired with extensive image augmentation, and the dramatic scale and diversity of our training data: millions of frames of shortest-path-expert trajectories collected inside approximately 200,000 procedurally generated houses containing 40,000 unique 3D assets. Our models, data, training code, and newly proposed 10-task benchmarking suite CHORES will be open-sourced.
Objaverse-XL: A Universe of 10M+ 3D Objects
Jul 11, 2023Natural language processing and 2D vision models have attained remarkable proficiency on many tasks primarily by escalating the scale of training data. However, 3D vision tasks have not seen the same progress, in part due to the challenges of acquiring high-quality 3D data. In this work, we present Objaverse-XL, a dataset of over 10 million 3D objects. Our dataset comprises deduplicated 3D objects from a diverse set of sources, including manually designed objects, photogrammetry scans of landmarks and everyday items, and professional scans of historic and antique artifacts. Representing the largest scale and diversity in the realm of 3D datasets, Objaverse-XL enables significant new possibilities for 3D vision. Our experiments demonstrate the improvements enabled with the scale provided by Objaverse-XL. We show that by training Zero123 on novel view synthesis, utilizing over 100 million multi-view rendered images, we achieve strong zero-shot generalization abilities. We hope that releasing Objaverse-XL will enable further innovations in the field of 3D vision at scale.
Objaverse: A Universe of Annotated 3D Objects
Dec 15, 2022Massive data corpora like WebText, Wikipedia, Conceptual Captions, WebImageText, and LAION have propelled recent dramatic progress in AI. Large neural models trained on such datasets produce impressive results and top many of today's benchmarks. A notable omission within this family of large-scale datasets is 3D data. Despite considerable interest and potential applications in 3D vision, datasets of high-fidelity 3D models continue to be mid-sized with limited diversity of object categories. Addressing this gap, we present Objaverse 1.0, a large dataset of objects with 800K+ (and growing) 3D models with descriptive captions, tags, and animations. Objaverse improves upon present day 3D repositories in terms of scale, number of categories, and in the visual diversity of instances within a category. We demonstrate the large potential of Objaverse via four diverse applications: training generative 3D models, improving tail category segmentation on the LVIS benchmark, training open-vocabulary object-navigation models for Embodied AI, and creating a new benchmark for robustness analysis of vision models. Objaverse can open new directions for research and enable new applications across the field of AI.