 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShould VLMs be Pre-trained with Image Data?
Mar 10, 2025Pre-trained LLMs that are further trained with image data perform well on vision-language tasks. While adding images during a second training phase effectively unlocks this capability, it is unclear how much of a gain or loss this two-step pipeline gives over VLMs which integrate images earlier into the training process. To investigate this, we train models spanning various datasets, scales, image-text ratios, and amount of pre-training done before introducing vision tokens. We then fine-tune these models and evaluate their downstream performance on a suite of vision-language and text-only tasks. We find that pre-training with a mixture of image and text data allows models to perform better on vision-language tasks while maintaining strong performance on text-only evaluations. On an average of 6 diverse tasks, we find that for a 1B model, introducing visual tokens 80% of the way through pre-training results in a 2% average improvement over introducing visual tokens to a fully pre-trained model.
Language models scale reliably with over-training and on downstream tasks
Mar 13, 2024



Scaling laws are useful guides for developing language models, but there are still gaps between current scaling studies and how language models are ultimately trained and evaluated. For instance, scaling is usually studied in the compute-optimal training regime (i.e., "Chinchilla optimal" regime); however, in practice, models are often over-trained to reduce inference costs. Moreover, scaling laws mostly predict loss on next-token prediction, but ultimately models are compared based on downstream task performance. In this paper, we address both shortcomings. To do so, we create a testbed of 104 models with 0.011B to 6.9B parameters trained with various numbers of tokens on three data distributions. First, we investigate scaling in the over-trained regime. We fit scaling laws that extrapolate in both the number of model parameters and the ratio of training tokens to parameters. This enables us to predict the validation loss of a 1.4B parameter, 900B token run (i.e., 32$\times$ over-trained) and a 6.9B parameter, 138B token run$\unicode{x2014}$each from experiments that take 300$\times$ less compute. Second, we relate the perplexity of a language model to its downstream task performance via a power law. We use this law to predict top-1 error averaged over downstream tasks for the two aforementioned models using experiments that take 20$\times$ less compute. Our experiments are available at https://github.com/mlfoundations/scaling.
Improving Multimodal Datasets with Image Captioning
Jul 19, 2023



Massive web datasets play a key role in the success of large vision-language models like CLIP and Flamingo. However, the raw web data is noisy, and existing filtering methods to reduce noise often come at the expense of data diversity. Our work focuses on caption quality as one major source of noise, and studies how generated captions can increase the utility of web-scraped datapoints with nondescript text. Through exploring different mixing strategies for raw and generated captions, we outperform the best filtering method proposed by the DataComp benchmark by 2% on ImageNet and 4% on average across 38 tasks, given a candidate pool of 128M image-text pairs. Our best approach is also 2x better at Flickr and MS-COCO retrieval. We then analyze what makes synthetic captions an effective source of text supervision. In experimenting with different image captioning models, we also demonstrate that the performance of a model on standard image captioning benchmarks (e.g., NoCaps CIDEr) is not a reliable indicator of the utility of the captions it generates for multimodal training. Finally, our experiments with using generated captions at DataComp's large scale (1.28B image-text pairs) offer insights into the limitations of synthetic text, as well as the importance of image curation with increasing training data quantity.
Objaverse-XL: A Universe of 10M+ 3D Objects
Jul 11, 2023Natural language processing and 2D vision models have attained remarkable proficiency on many tasks primarily by escalating the scale of training data. However, 3D vision tasks have not seen the same progress, in part due to the challenges of acquiring high-quality 3D data. In this work, we present Objaverse-XL, a dataset of over 10 million 3D objects. Our dataset comprises deduplicated 3D objects from a diverse set of sources, including manually designed objects, photogrammetry scans of landmarks and everyday items, and professional scans of historic and antique artifacts. Representing the largest scale and diversity in the realm of 3D datasets, Objaverse-XL enables significant new possibilities for 3D vision. Our experiments demonstrate the improvements enabled with the scale provided by Objaverse-XL. We show that by training Zero123 on novel view synthesis, utilizing over 100 million multi-view rendered images, we achieve strong zero-shot generalization abilities. We hope that releasing Objaverse-XL will enable further innovations in the field of 3D vision at scale.
DataComp: In search of the next generation of multimodal datasets
May 03, 2023Large multimodal datasets have been instrumental in recent breakthroughs such as CLIP, Stable Diffusion, and GPT-4. At the same time, datasets rarely receive the same research attention as model architectures or training algorithms. To address this shortcoming in the machine learning ecosystem, we introduce DataComp, a benchmark where the training code is fixed and researchers innovate by proposing new training sets. We provide a testbed for dataset experiments centered around a new candidate pool of 12.8B image-text pairs from Common Crawl. Participants in our benchmark design new filtering techniques or curate new data sources and then evaluate their new dataset by running our standardized CLIP training code and testing on 38 downstream test sets. Our benchmark consists of multiple scales, with four candidate pool sizes and associated compute budgets ranging from 12.8M to 12.8B samples seen during training. This multi-scale design facilitates the study of scaling trends and makes the benchmark accessible to researchers with varying resources. Our baseline experiments show that the DataComp workflow is a promising way of improving multimodal datasets. We introduce DataComp-1B, a dataset created by applying a simple filtering algorithm to the 12.8B candidate pool. The resulting 1.4B subset enables training a CLIP ViT-L/14 from scratch to 79.2% zero-shot accuracy on ImageNet. Our new ViT-L/14 model outperforms a larger ViT-g/14 trained on LAION-2B by 0.7 percentage points while requiring 9x less training compute. We also outperform OpenAI's CLIP ViT-L/14 by 3.7 percentage points, which is trained with the same compute budget as our model. These gains highlight the potential for improving model performance by carefully curating training sets. We view DataComp-1B as only the first step and hope that DataComp paves the way toward the next generation of multimodal datasets.
Multimodal C4: An Open, Billion-scale Corpus of Images Interleaved With Text
Apr 14, 2023In-context vision and language models like Flamingo support arbitrarily interleaved sequences of images and text as input. This format not only enables few-shot learning via interleaving independent supervised (image, text) examples, but also, more complex prompts involving interaction between images, e.g., "What do image A and image B have in common?" To support this interface, pretraining occurs over web corpora that similarly contain interleaved images+text. To date, however, large-scale data of this form have not been publicly available. We release Multimodal C4 (mmc4), an augmentation of the popular text-only c4 corpus with images interleaved. We use a linear assignment algorithm to place images into longer bodies of text using CLIP features, a process that we show outperforms alternatives. mmc4 spans everyday topics like cooking, travel, technology, etc. A manual inspection of a random sample of documents shows that a vast majority (90%) of images are topically relevant, and that linear assignment frequently selects individual sentences specifically well-aligned with each image (78%). After filtering NSFW images, ads, etc., the corpus contains 103M documents containing 585M images interleaved with 43B English tokens.
Patching open-vocabulary models by interpolating weights
Aug 10, 2022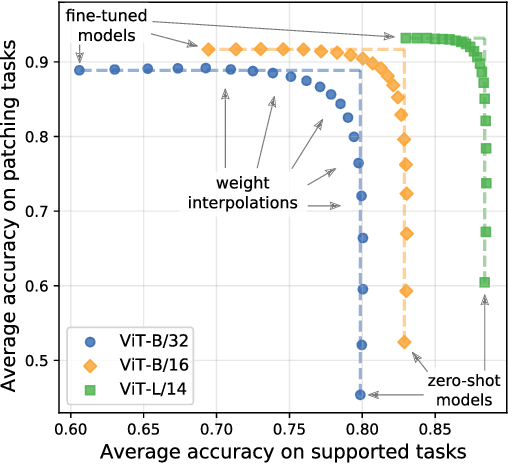

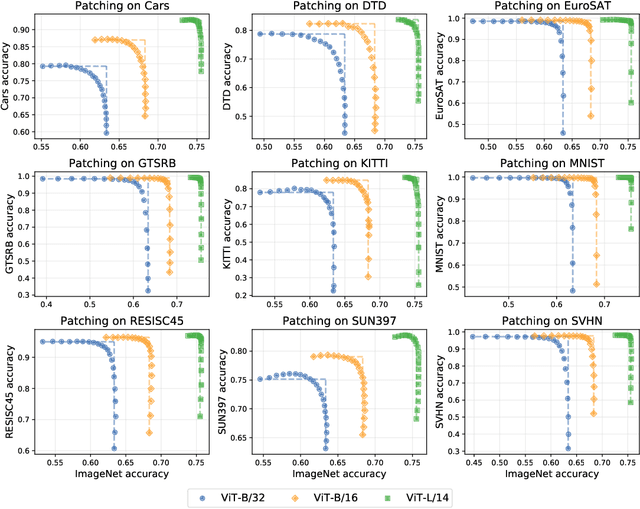

Open-vocabulary models like CLIP achieve high accuracy across many image classification tasks. However, there are still settings where their zero-shot performance is far from optimal. We study model patching, where the goal is to improve accuracy on specific tasks without degrading accuracy on tasks where performance is already adequate. Towards this goal, we introduce PAINT, a patching method that uses interpolations between the weights of a model before fine-tuning and the weights after fine-tuning on a task to be patched. On nine tasks where zero-shot CLIP performs poorly, PAINT increases accuracy by 15 to 60 percentage points while preserving accuracy on ImageNet within one percentage point of the zero-shot model. PAINT also allows a single model to be patched on multiple tasks and improves with model scale. Furthermore, we identify cases of broad transfer, where patching on one task increases accuracy on other tasks even when the tasks have disjoint classes. Finally, we investigate applications beyond common benchmarks such as counting or reducing the impact of typographic attacks on CLIP. Our findings demonstrate that it is possible to expand the set of tasks on which open-vocabulary models achieve high accuracy without re-training them from scratch.
Structure from Action: Learning Interactions for Articulated Object 3D Structure Discovery
Jul 19, 2022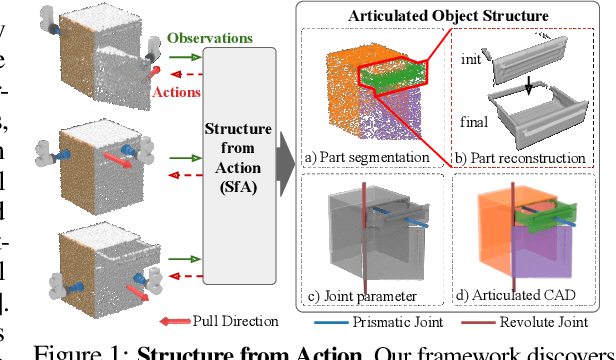
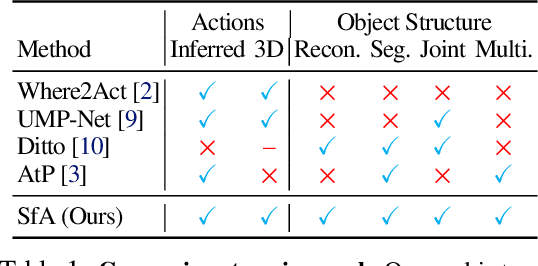
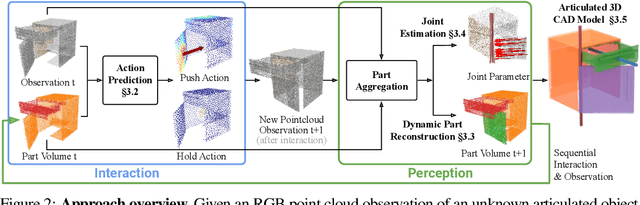

Articulated objects are abundant in daily life. Discovering their parts, joints, and kinematics is crucial for robots to interact with these objects. We introduce Structure from Action (SfA), a framework that discovers the 3D part geometry and joint parameters of unseen articulated objects via a sequence of inferred interactions. Our key insight is that 3D interaction and perception should be considered in conjunction to construct 3D articulated CAD models, especially in the case of categories not seen during training. By selecting informative interactions, SfA discovers parts and reveals initially occluded surfaces, like the inside of a closed drawer. By aggregating visual observations in 3D, SfA accurately segments multiple parts, reconstructs part geometry, and infers all joint parameters in a canonical coordinate frame. Our experiments demonstrate that a single SfA model trained in simulation can generalize to many unseen object categories with unknown kinematic structures and to real-world objects. Code and data will be publicly available.
Continuous Scene Representations for Embodied AI
Mar 31, 2022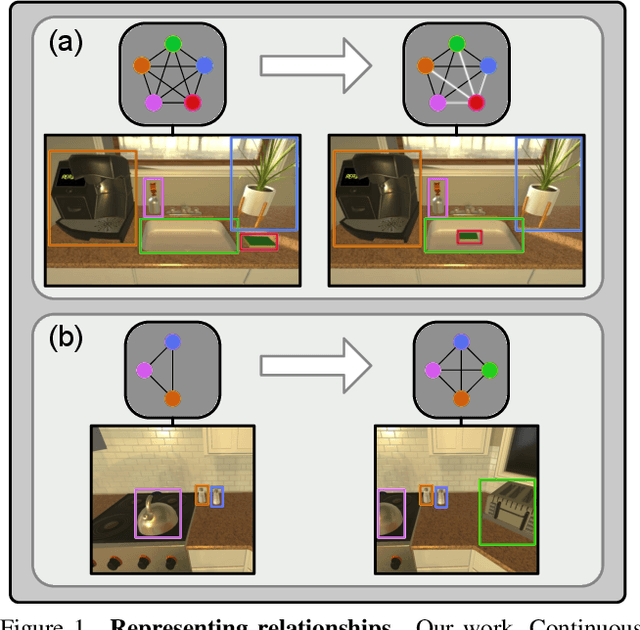
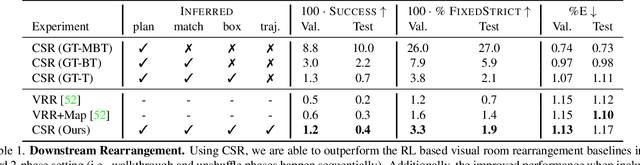
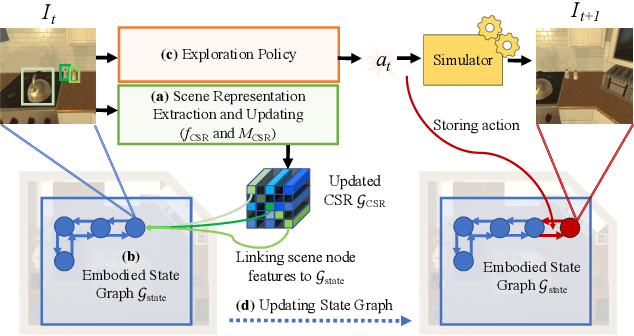
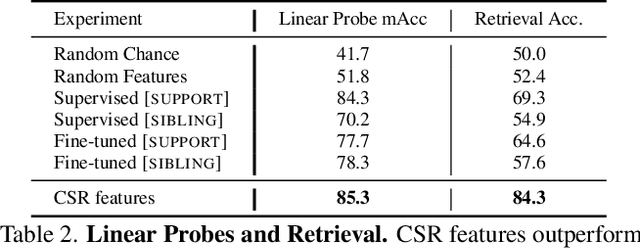
We propose Continuous Scene Representations (CSR), a scene representation constructed by an embodied agent navigating within a space, where objects and their relationships are modeled by continuous valued embeddings. Our method captures feature relationships between objects, composes them into a graph structure on-the-fly, and situates an embodied agent within the representation. Our key insight is to embed pair-wise relationships between objects in a latent space. This allows for a richer representation compared to discrete relations (e.g., [support], [next-to]) commonly used for building scene representations. CSR can track objects as the agent moves in a scene, update the representation accordingly, and detect changes in room configurations. Using CSR, we outperform state-of-the-art approaches for the challenging downstream task of visual room rearrangement, without any task specific training. Moreover, we show the learned embeddings capture salient spatial details of the scene and show applicability to real world data. A summery video and code is available at https://prior.allenai.org/projects/csr.
CLIP on Wheels: Zero-Shot Object Navigation as Object Localization and Exploration
Mar 20, 2022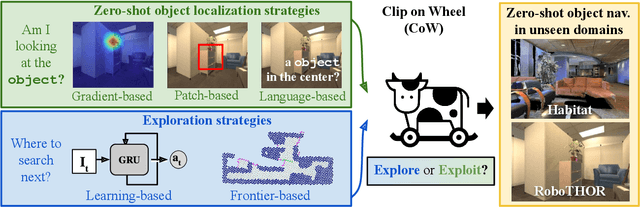

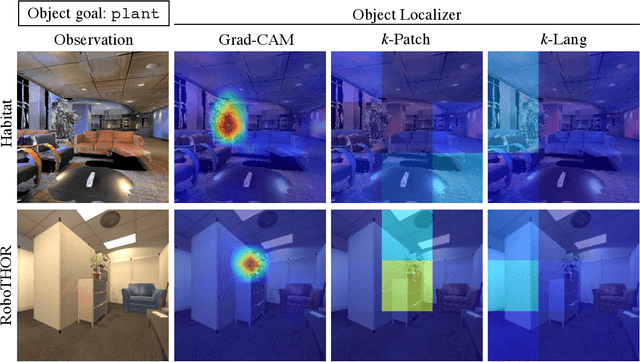
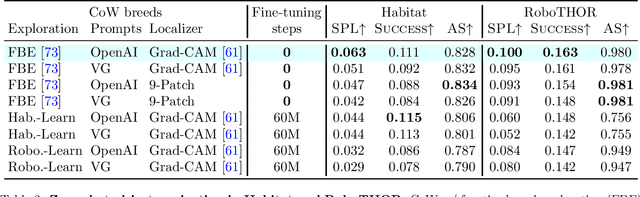
Households across the world contain arbitrary objects: from mate gourds and coffee mugs to sitars and guitars. Considering this diversity, robot perception must handle a large variety of semantic objects without additional fine-tuning to be broadly applicable in homes. Recently, zero-shot models have demonstrated impressive performance in image classification of arbitrary objects (i.e., classifying images at inference with categories not explicitly seen during training). In this paper, we translate the success of zero-shot vision models (e.g., CLIP) to the popular embodied AI task of object navigation. In our setting, an agent must find an arbitrary goal object, specified via text, in unseen environments coming from different datasets. Our key insight is to modularize the task into zero-shot object localization and exploration. Employing this philosophy, we design CLIP on Wheels (CoW) baselines for the task and evaluate each zero-shot model in both Habitat and RoboTHOR simulators. We find that a straightforward CoW, with CLIP-based object localization plus classical exploration, and no additional training, often outperforms learnable approaches in terms of success, efficiency, and robustness to dataset distribution shift. This CoW achieves 6.3% SPL in Habitat and 10.0% SPL in RoboTHOR, when tested zero-shot on all categories. On a subset of four RoboTHOR categories considered in prior work, the same CoW shows a 16.1 percentage point improvement in Success over the learnable state-of-the-art baseline.