 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure from Action: Learning Interactions for Articulated Object 3D Structure Discovery
Paper and Code
Jul 19, 2022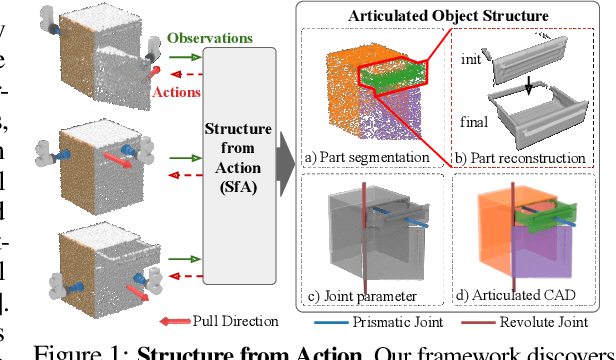
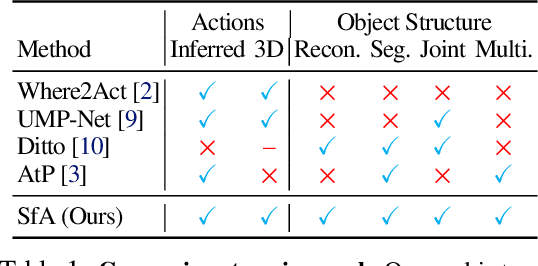
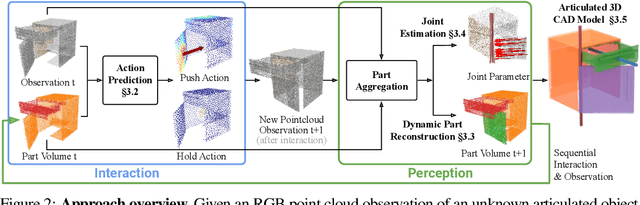

Articulated objects are abundant in daily life. Discovering their parts, joints, and kinematics is crucial for robots to interact with these objects. We introduce Structure from Action (SfA), a framework that discovers the 3D part geometry and joint parameters of unseen articulated objects via a sequence of inferred interactions. Our key insight is that 3D interaction and perception should be considered in conjunction to construct 3D articulated CAD models, especially in the case of categories not seen during training. By selecting informative interactions, SfA discovers parts and reveals initially occluded surfaces, like the inside of a closed drawer. By aggregating visual observations in 3D, SfA accurately segments multiple parts, reconstructs part geometry, and infers all joint parameters in a canonical coordinate frame. Our experiments demonstrate that a single SfA model trained in simulation can generalize to many unseen object categories with unknown kinematic structures and to real-world objects. Code and data will be publicly available.