 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Complexity in VideoQA via Visual Program Generation
May 19, 2025We propose a data-driven approach to analyzing query complexity in Video Question Answering (VideoQA). Previous efforts in benchmark design have relied on human expertise to design challenging questions, yet we experimentally show that humans struggle to predict which questions are difficult for machine learning models. Our automatic approach leverages recent advances in code generation for visual question answering, using the complexity of generated code as a proxy for question difficulty. We demonstrate that this measure correlates significantly better with model performance than human estimates. To operationalize this insight, we propose an algorithm for estimating question complexity from code. It identifies fine-grained primitives that correlate with the hardest questions for any given set of models, making it easy to scale to new approaches in the future. Finally, to further illustrate the utility of our method, we extend it to automatically generate complex questions, constructing a new benchmark that is 1.9 times harder than the popular NExT-QA.
Should VLMs be Pre-trained with Image Data?
Mar 10, 2025Pre-trained LLMs that are further trained with image data perform well on vision-language tasks. While adding images during a second training phase effectively unlocks this capability, it is unclear how much of a gain or loss this two-step pipeline gives over VLMs which integrate images earlier into the training process. To investigate this, we train models spanning various datasets, scales, image-text ratios, and amount of pre-training done before introducing vision tokens. We then fine-tune these models and evaluate their downstream performance on a suite of vision-language and text-only tasks. We find that pre-training with a mixture of image and text data allows models to perform better on vision-language tasks while maintaining strong performance on text-only evaluations. On an average of 6 diverse tasks, we find that for a 1B model, introducing visual tokens 80% of the way through pre-training results in a 2% average improvement over introducing visual tokens to a fully pre-trained model.
GHIL-Glue: Hierarchical Control with Filtered Subgoal Images
Oct 26, 2024

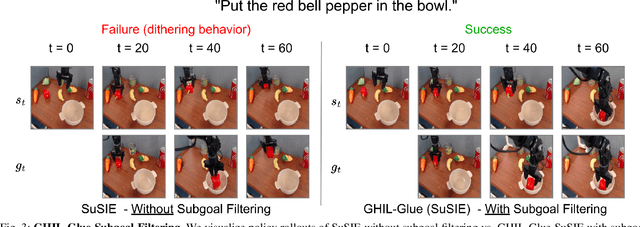
Image and video generative models that are pre-trained on Internet-scale data can greatly increase the generalization capacity of robot learning systems. These models can function as high-level planners, generating intermediate subgoals for low-level goal-conditioned policies to reach. However, the performance of these systems can be greatly bottlenecked by the interface between generative models and low-level controllers. For example, generative models may predict photorealistic yet physically infeasible frames that confuse low-level policies. Low-level policies may also be sensitive to subtle visual artifacts in generated goal images. This paper addresses these two facets of generalization, providing an interface to effectively "glue together" language-conditioned image or video prediction models with low-level goal-conditioned policies. Our method, Generative Hierarchical Imitation Learning-Glue (GHIL-Glue), filters out subgoals that do not lead to task progress and improves the robustness of goal-conditioned policies to generated subgoals with harmful visual artifacts. We find in extensive experiments in both simulated and real environments that GHIL-Glue achieves a 25% improvement across several hierarchical models that leverage generative subgoals, achieving a new state-of-the-art on the CALVIN simulation benchmark for policies using observations from a single RGB camera. GHIL-Glue also outperforms other generalist robot policies across 3/4 language-conditioned manipulation tasks testing zero-shot generalization in physical experiments.
Language-Embedded Gaussian Splats (LEGS): Incrementally Building Room-Scale Representations with a Mobile Robot
Sep 26, 2024
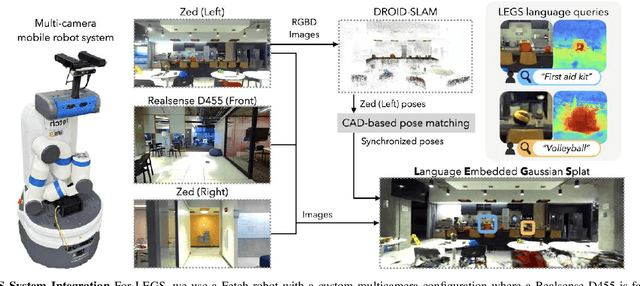

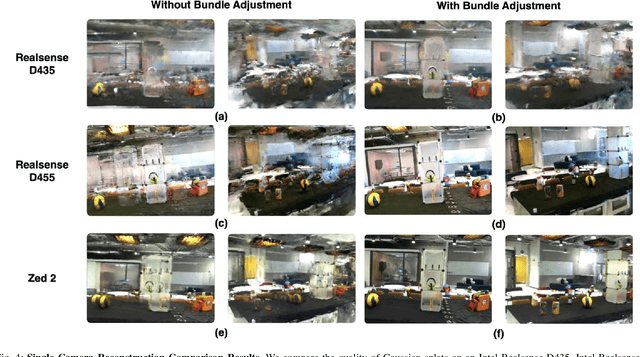
Building semantic 3D maps is valuable for searching for objects of interest in offices, warehouses, stores, and homes. We present a mapping system that incrementally builds a Language-Embedded Gaussian Splat (LEGS): a detailed 3D scene representation that encodes both appearance and semantics in a unified representation. LEGS is trained online as a robot traverses its environment to enable localization of open-vocabulary object queries. We evaluate LEGS on 4 room-scale scenes where we query for objects in the scene to assess how LEGS can capture semantic meaning. We compare LEGS to LERF and find that while both systems have comparable object query success rates, LEGS trains over 3.5x faster than LERF. Results suggest that a multi-camera setup and incremental bundle adjustment can boost visual reconstruction quality in constrained robot trajectories, and suggest LEGS can localize open-vocabulary and long-tail object queries with up to 66% accuracy.
DataComp-LM: In search of the next generation of training sets for language models
Jun 18, 2024



We introduce DataComp for Language Models (DCLM), a testbed for controlled dataset experiments with the goal of improving language models. As part of DCLM, we provide a standardized corpus of 240T tokens extracted from Common Crawl, effective pretraining recipes based on the OpenLM framework, and a broad suite of 53 downstream evaluations. Participants in the DCLM benchmark can experiment with data curation strategies such as deduplication, filtering, and data mixing at model scales ranging from 412M to 7B parameters. As a baseline for DCLM, we conduct extensive experiments and find that model-based filtering is key to assembling a high-quality training set. The resulting dataset, DCLM-Baseline enables training a 7B parameter language model from scratch to 64% 5-shot accuracy on MMLU with 2.6T training tokens. Compared to MAP-Neo, the previous state-of-the-art in open-data language models, DCLM-Baseline represents a 6.6 percentage point improvement on MMLU while being trained with 40% less compute. Our baseline model is also comparable to Mistral-7B-v0.3 and Llama 3 8B on MMLU (63% & 66%), and performs similarly on an average of 53 natural language understanding tasks while being trained with 6.6x less compute than Llama 3 8B. Our results highlight the importance of dataset design for training language models and offer a starting point for further research on data curation.
OpenVLA: An Open-Source Vision-Language-Action Model
Jun 13, 2024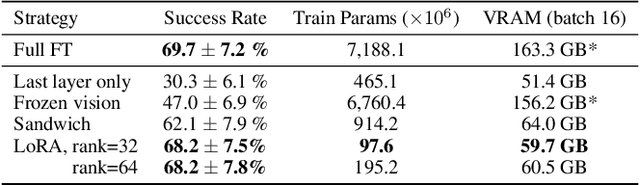
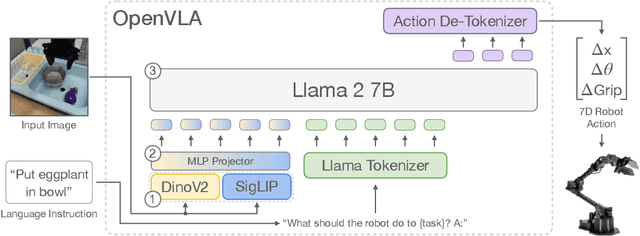
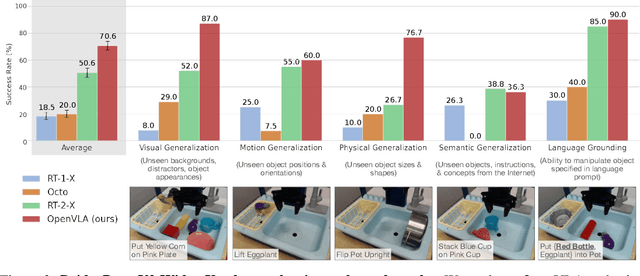
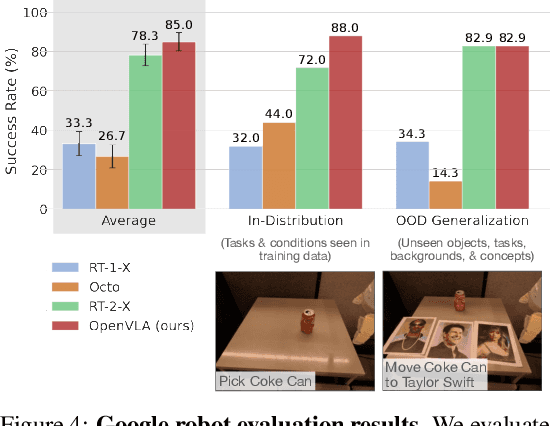
Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
Linearizing Large Language Models
May 10, 2024



Linear transformers have emerged as a subquadratic-time alternative to softmax attention and have garnered significant interest due to their fixed-size recurrent state that lowers inference cost. However, their original formulation suffers from poor scaling and underperforms compute-matched transformers. Recent linear models such as RWKV and Mamba have attempted to address these shortcomings by proposing novel time-mixing and gating architectures, but pre-training large language models requires significant data and compute investments. Thus, the search for subquadratic architectures is limited by the availability of compute and quality pre-training datasets. As a cost-effective alternative to pre-training linear transformers, we propose Scalable UPtraining for Recurrent Attention (SUPRA). We present a method to uptrain existing large pre-trained transformers into Recurrent Neural Networks (RNNs) with a modest compute budget. This allows us to leverage the strong pre-training data and performance of existing transformer LLMs, while requiring 5% of the training cost. We find that our linearization technique leads to competitive performance on standard benchmarks, but we identify persistent in-context learning and long-context modeling shortfalls for even the largest linear models. Our code and models can be found at https://github.com/TRI-ML/linear_open_lm.
How Generalizable Is My Behavior Cloning Policy? A Statistical Approach to Trustworthy Performance Evaluation
May 08, 2024



With the rise of stochastic generative models in robot policy learning, end-to-end visuomotor policies are increasingly successful at solving complex tasks by learning from human demonstrations. Nevertheless, since real-world evaluation costs afford users only a small number of policy rollouts, it remains a challenge to accurately gauge the performance of such policies. This is exacerbated by distribution shifts causing unpredictable changes in performance during deployment. To rigorously evaluate behavior cloning policies, we present a framework that provides a tight lower-bound on robot performance in an arbitrary environment, using a minimal number of experimental policy rollouts. Notably, by applying the standard stochastic ordering to robot performance distributions, we provide a worst-case bound on the entire distribution of performance (via bounds on the cumulative distribution function) for a given task. We build upon established statistical results to ensure that the bounds hold with a user-specified confidence level and tightness, and are constructed from as few policy rollouts as possible. In experiments we evaluate policies for visuomotor manipulation in both simulation and hardware. Specifically, we (i) empirically validate the guarantees of the bounds in simulated manipulation settings, (ii) find the degree to which a learned policy deployed on hardware generalizes to new real-world environments, and (iii) rigorously compare two policies tested in out-of-distribution settings. Our experimental data, code, and implementation of confidence bounds are open-source.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Language models scale reliably with over-training and on downstream tasks
Mar 13, 2024



Scaling laws are useful guides for developing language models, but there are still gaps between current scaling studies and how language models are ultimately trained and evaluated. For instance, scaling is usually studied in the compute-optimal training regime (i.e., "Chinchilla optimal" regime); however, in practice, models are often over-trained to reduce inference costs. Moreover, scaling laws mostly predict loss on next-token prediction, but ultimately models are compared based on downstream task performance. In this paper, we address both shortcomings. To do so, we create a testbed of 104 models with 0.011B to 6.9B parameters trained with various numbers of tokens on three data distributions. First, we investigate scaling in the over-trained regime. We fit scaling laws that extrapolate in both the number of model parameters and the ratio of training tokens to parameters. This enables us to predict the validation loss of a 1.4B parameter, 900B token run (i.e., 32$\times$ over-trained) and a 6.9B parameter, 138B token run$\unicode{x2014}$each from experiments that take 300$\times$ less compute. Second, we relate the perplexity of a language model to its downstream task performance via a power law. We use this law to predict top-1 error averaged over downstream tasks for the two aforementioned models using experiments that take 20$\times$ less compute. Our experiments are available at https://github.com/mlfoundations/scaling.