 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Complexity in VideoQA via Visual Program Generation
May 19, 2025We propose a data-driven approach to analyzing query complexity in Video Question Answering (VideoQA). Previous efforts in benchmark design have relied on human expertise to design challenging questions, yet we experimentally show that humans struggle to predict which questions are difficult for machine learning models. Our automatic approach leverages recent advances in code generation for visual question answering, using the complexity of generated code as a proxy for question difficulty. We demonstrate that this measure correlates significantly better with model performance than human estimates. To operationalize this insight, we propose an algorithm for estimating question complexity from code. It identifies fine-grained primitives that correlate with the hardest questions for any given set of models, making it easy to scale to new approaches in the future. Finally, to further illustrate the utility of our method, we extend it to automatically generate complex questions, constructing a new benchmark that is 1.9 times harder than the popular NExT-QA.
Real2Render2Real: Scaling Robot Data Without Dynamics Simulation or Robot Hardware
May 14, 2025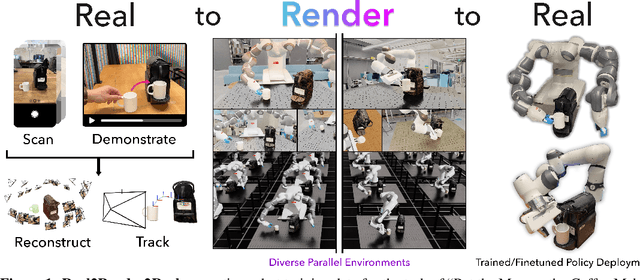
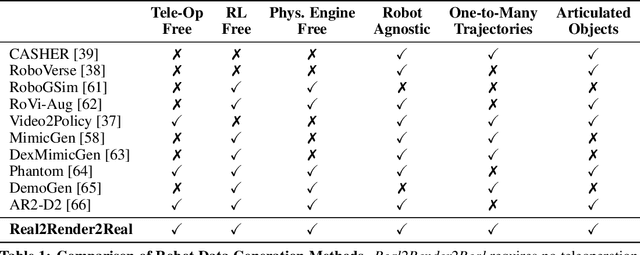
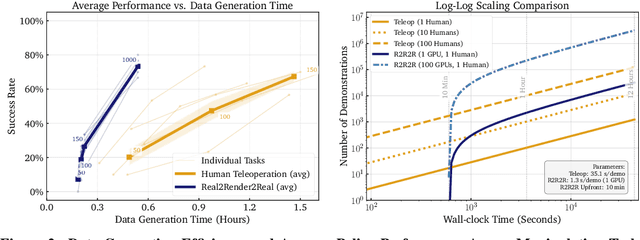
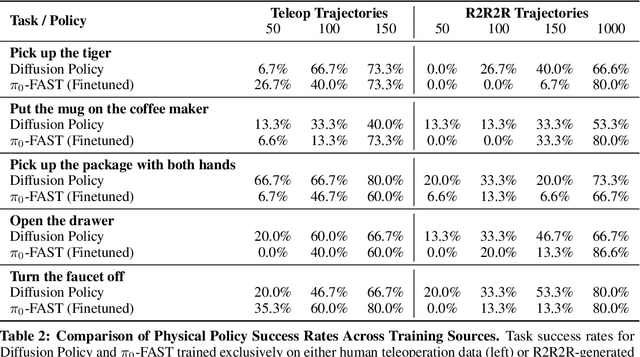
Scaling robot learning requires vast and diverse datasets. Yet the prevailing data collection paradigm-human teleoperation-remains costly and constrained by manual effort and physical robot access. We introduce Real2Render2Real (R2R2R), a novel approach for generating robot training data without relying on object dynamics simulation or teleoperation of robot hardware. The input is a smartphone-captured scan of one or more objects and a single video of a human demonstration. R2R2R renders thousands of high visual fidelity robot-agnostic demonstrations by reconstructing detailed 3D object geometry and appearance, and tracking 6-DoF object motion. R2R2R uses 3D Gaussian Splatting (3DGS) to enable flexible asset generation and trajectory synthesis for both rigid and articulated objects, converting these representations to meshes to maintain compatibility with scalable rendering engines like IsaacLab but with collision modeling off. Robot demonstration data generated by R2R2R integrates directly with models that operate on robot proprioceptive states and image observations, such as vision-language-action models (VLA) and imitation learning policies. Physical experiments suggest that models trained on R2R2R data from a single human demonstration can match the performance of models trained on 150 human teleoperation demonstrations. Project page: https://real2render2real.com
Is Your Imitation Learning Policy Better than Mine? Policy Comparison with Near-Optimal Stopping
Mar 14, 2025Imitation learning has enabled robots to perform complex, long-horizon tasks in challenging dexterous manipulation settings. As new methods are developed, they must be rigorously evaluated and compared against corresponding baselines through repeated evaluation trials. However, policy comparison is fundamentally constrained by a small feasible sample size (e.g., 10 or 50) due to significant human effort and limited inference throughput of policies. This paper proposes a novel statistical framework for rigorously comparing two policies in the small sample size regime. Prior work in statistical policy comparison relies on batch testing, which requires a fixed, pre-determined number of trials and lacks flexibility in adapting the sample size to the observed evaluation data. Furthermore, extending the test with additional trials risks inducing inadvertent p-hacking, undermining statistical assurances. In contrast, our proposed statistical test is sequential, allowing researchers to decide whether or not to run more trials based on intermediate results. This adaptively tailors the number of trials to the difficulty of the underlying comparison, saving significant time and effort without sacrificing probabilistic correctness. Extensive numerical simulation and real-world robot manipulation experiments show that our test achieves near-optimal stopping, letting researchers stop evaluation and make a decision in a near-minimal number of trials. Specifically, it reduces the number of evaluation trials by up to 40% as compared to state-of-the-art baselines, while preserving the probabilistic correctness and statistical power of the comparison. Moreover, our method is strongest in the most challenging comparison instances (requiring the most evaluation trials); in a multi-task comparison scenario, we save the evaluator more than 200 simulation rollouts.
CARTO: Category and Joint Agnostic Reconstruction of ARTiculated Objects
Mar 28, 2023



We present CARTO, a novel approach for reconstructing multiple articulated objects from a single stereo RGB observation. We use implicit object-centric representations and learn a single geometry and articulation decoder for multiple object categories. Despite training on multiple categories, our decoder achieves a comparable reconstruction accuracy to methods that train bespoke decoders separately for each category. Combined with our stereo image encoder we infer the 3D shape, 6D pose, size, joint type, and the joint state of multiple unknown objects in a single forward pass. Our method achieves a 20.4% absolute improvement in mAP 3D IOU50 for novel instances when compared to a two-stage pipeline. Inference time is fast and can run on a NVIDIA TITAN XP GPU at 1 HZ for eight or less objects present. While only trained on simulated data, CARTO transfers to real-world object instances. Code and evaluation data is available at: http://carto.cs.uni-freiburg.de