 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReliable and Scalable Robot Policy Evaluation with Imperfect Simulators
Oct 05, 2025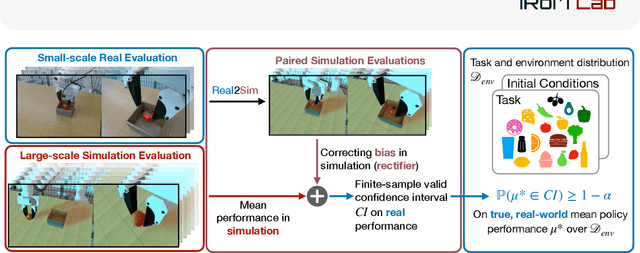

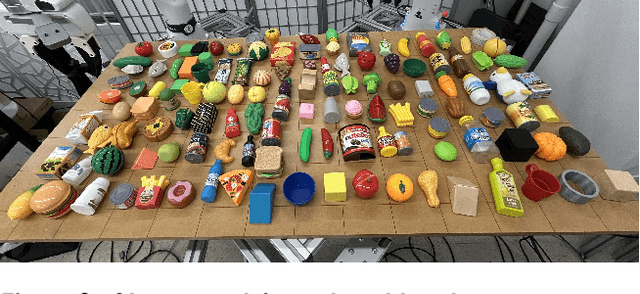

Rapid progress in imitation learning, foundation models, and large-scale datasets has led to robot manipulation policies that generalize to a wide-range of tasks and environments. However, rigorous evaluation of these policies remains a challenge. Typically in practice, robot policies are often evaluated on a small number of hardware trials without any statistical assurances. We present SureSim, a framework to augment large-scale simulation with relatively small-scale real-world testing to provide reliable inferences on the real-world performance of a policy. Our key idea is to formalize the problem of combining real and simulation evaluations as a prediction-powered inference problem, in which a small number of paired real and simulation evaluations are used to rectify bias in large-scale simulation. We then leverage non-asymptotic mean estimation algorithms to provide confidence intervals on mean policy performance. Using physics-based simulation, we evaluate both diffusion policy and multi-task fine-tuned \(\pi_0\) on a joint distribution of objects and initial conditions, and find that our approach saves over \(20-25\%\) of hardware evaluation effort to achieve similar bounds on policy performance.
Guiding Data Collection via Factored Scaling Curves
May 12, 2025Generalist imitation learning policies trained on large datasets show great promise for solving diverse manipulation tasks. However, to ensure generalization to different conditions, policies need to be trained with data collected across a large set of environmental factor variations (e.g., camera pose, table height, distractors) $-$ a prohibitively expensive undertaking, if done exhaustively. We introduce a principled method for deciding what data to collect and how much to collect for each factor by constructing factored scaling curves (FSC), which quantify how policy performance varies as data scales along individual or paired factors. These curves enable targeted data acquisition for the most influential factor combinations within a given budget. We evaluate the proposed method through extensive simulated and real-world experiments, across both training-from-scratch and fine-tuning settings, and show that it boosts success rates in real-world tasks in new environments by up to 26% over existing data-collection strategies. We further demonstrate how factored scaling curves can effectively guide data collection using an offline metric, without requiring real-world evaluation at scale.
Is Your Imitation Learning Policy Better than Mine? Policy Comparison with Near-Optimal Stopping
Mar 14, 2025Imitation learning has enabled robots to perform complex, long-horizon tasks in challenging dexterous manipulation settings. As new methods are developed, they must be rigorously evaluated and compared against corresponding baselines through repeated evaluation trials. However, policy comparison is fundamentally constrained by a small feasible sample size (e.g., 10 or 50) due to significant human effort and limited inference throughput of policies. This paper proposes a novel statistical framework for rigorously comparing two policies in the small sample size regime. Prior work in statistical policy comparison relies on batch testing, which requires a fixed, pre-determined number of trials and lacks flexibility in adapting the sample size to the observed evaluation data. Furthermore, extending the test with additional trials risks inducing inadvertent p-hacking, undermining statistical assurances. In contrast, our proposed statistical test is sequential, allowing researchers to decide whether or not to run more trials based on intermediate results. This adaptively tailors the number of trials to the difficulty of the underlying comparison, saving significant time and effort without sacrificing probabilistic correctness. Extensive numerical simulation and real-world robot manipulation experiments show that our test achieves near-optimal stopping, letting researchers stop evaluation and make a decision in a near-minimal number of trials. Specifically, it reduces the number of evaluation trials by up to 40% as compared to state-of-the-art baselines, while preserving the probabilistic correctness and statistical power of the comparison. Moreover, our method is strongest in the most challenging comparison instances (requiring the most evaluation trials); in a multi-task comparison scenario, we save the evaluator more than 200 simulation rollouts.
Privacy-Preserving Map-Free Exploration for Confirming the Absence of a Radioactive Source
Feb 27, 2024Performing an inspection task while maintaining the privacy of the inspected site is a challenging balancing act. In this work, we are motivated by the future of nuclear arms control verification, which requires both a high level of privacy and guaranteed correctness. For scenarios with limitations on sensors and stored information due to the potentially secret nature of observable features, we propose a robotic verification procedure that provides map-free exploration to perform a source verification task without requiring, nor revealing, any task-irrelevant, site-specific information. We provide theoretical guarantees on the privacy and correctness of our approach, validated by extensive simulated and hardware experiments.
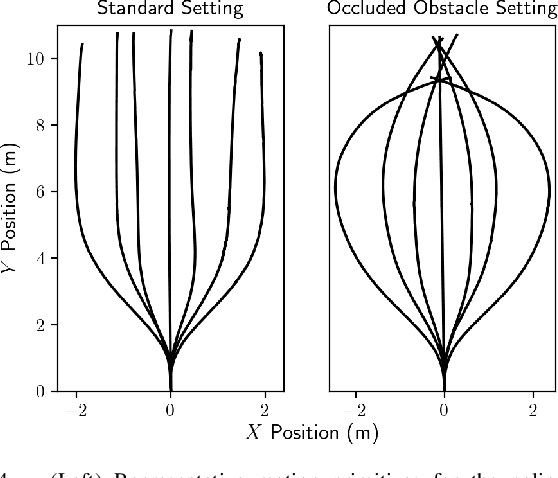
Online Learning for Obstacle Avoidance
Jun 14, 2023



We approach the fundamental problem of obstacle avoidance for robotic systems via the lens of online learning. In contrast to prior work that either assumes worst-case realizations of uncertainty in the environment or a stationary stochastic model of uncertainty, we propose a method that is efficient to implement and provably grants instance-optimality with respect to perturbations of trajectories generated from an open-loop planner (in the sense of minimizing worst-case regret). The resulting policy adapts online to realizations of uncertainty and provably compares well with the best obstacle avoidance policy in hindsight from a rich class of policies. The method is validated in simulation on a dynamical system environment and compared to baseline open-loop planning and robust Hamilton- Jacobi reachability techniques. Further, it is implemented on a hardware example where a quadruped robot traverses a dense obstacle field and encounters input disturbances due to time delays, model uncertainty, and dynamics nonlinearities.
FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
Oct 12, 2022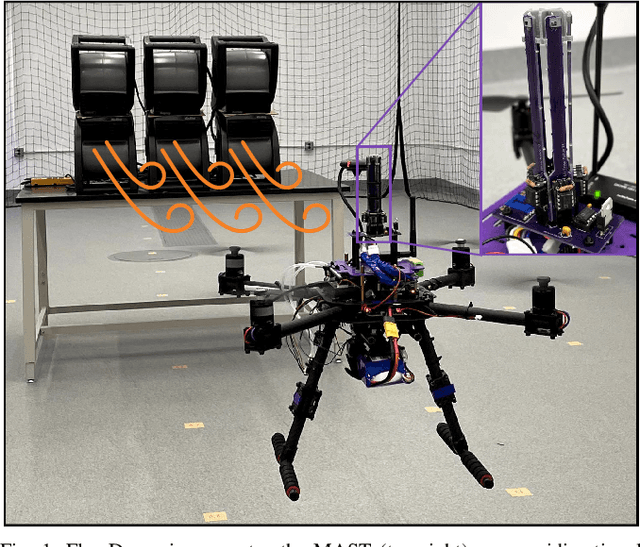
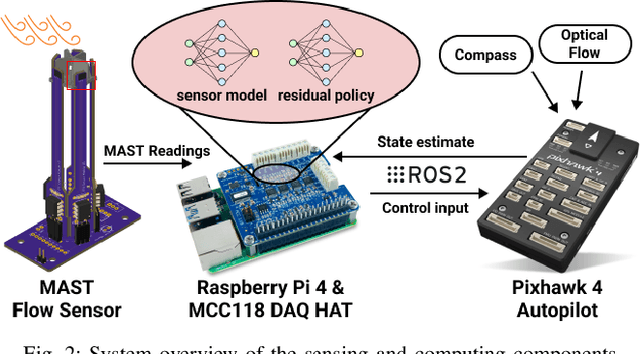
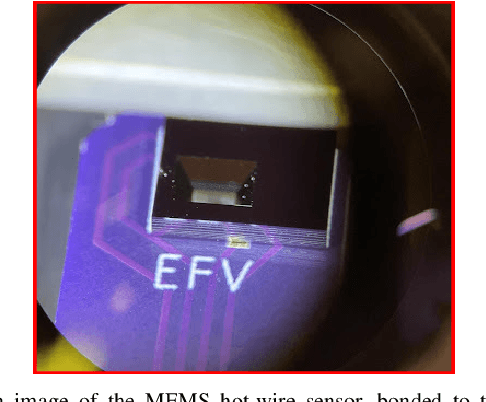

Unmanned aerial vehicles (UAVs) are finding use in applications that place increasing emphasis on robustness to external disturbances including extreme wind. However, traditional multirotor UAV platforms do not directly sense wind; conventional flow sensors are too slow, insensitive, or bulky for widespread integration on UAVs. Instead, drones typically observe the effects of wind indirectly through accumulated errors in position or trajectory tracking. In this work, we integrate a novel flow sensor based on micro-electro-mechanical systems (MEMS) hot-wire technology developed in our prior work onto a multirotor UAV for wind estimation. These sensors are omnidirectional, lightweight, fast, and accurate. In order to achieve superior tracking performance in windy conditions, we train a `wind-aware' residual-based controller via reinforcement learning using simulated wind gusts and their aerodynamic effects on the drone. In extensive hardware experiments, we demonstrate the wind-aware controller outperforming two strong `wind-unaware' baseline controllers in challenging windy conditions.
Failure Prediction with Statistical Guarantees for Vision-Based Robot Control
Feb 11, 2022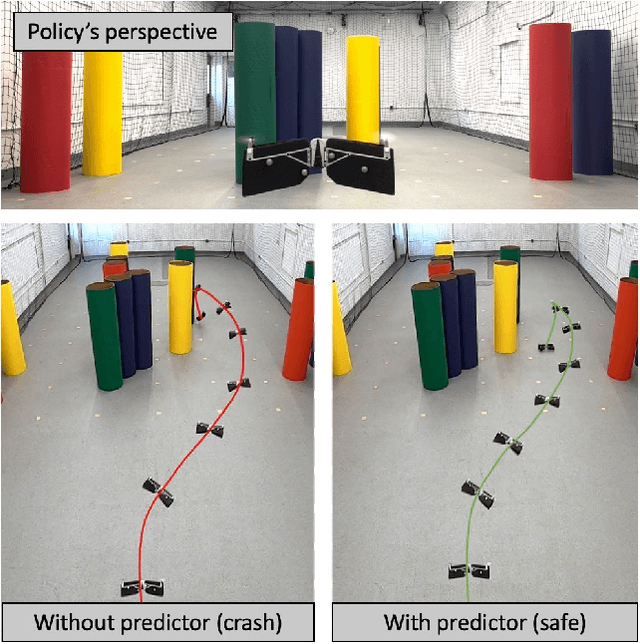
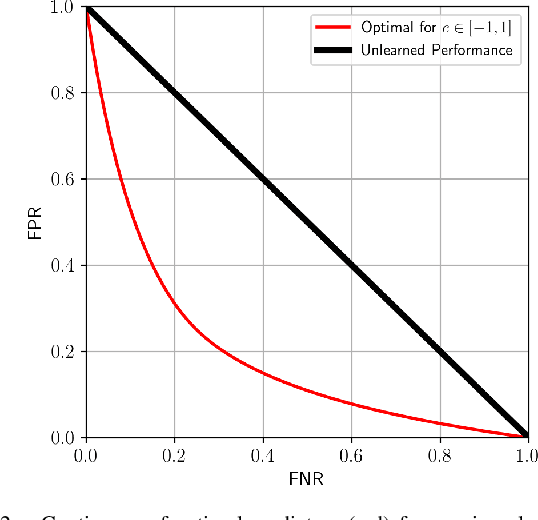
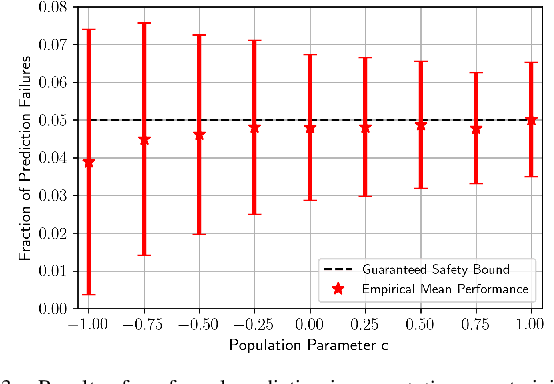
We are motivated by the problem of performing failure prediction for safety-critical robotic systems with high-dimensional sensor observations (e.g., vision). Given access to a blackbox control policy (e.g., in the form of a neural network) and a dataset of training environments, we present an approach for synthesizing a failure predictor with guaranteed bounds on false-positive and false-negative errors. In order to achieve this, we utilize techniques from Probably Approximately Correct (PAC)-Bayes generalization theory. In addition, we present novel class-conditional bounds that allow us to tradeoff the relative rates of false-positive vs. false-negative errors. We propose algorithms that train failure predictors (that take as input the history of sensor observations) by minimizing our theoretical error bounds. We demonstrate the resulting approach using extensive simulation and hardware experiments for vision-based navigation with a drone and grasping objects with a robotic manipulator equipped with a wrist-mounted RGB-D camera. These experiments illustrate the ability of our approach to (1) provide strong bounds on failure prediction error rates (that closely match empirical error rates), and (2) improve safety by predicting failures.
Generating Adversarial Disturbances for Controller Verification
Dec 12, 2020

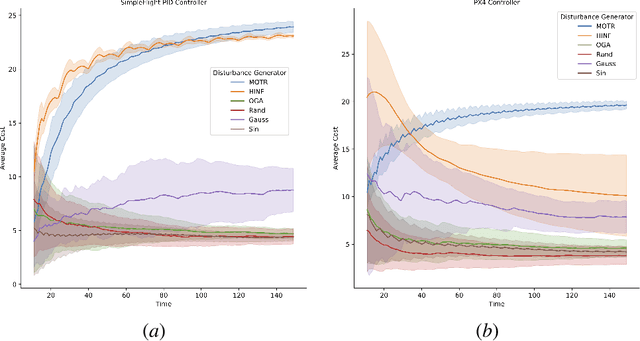
We consider the problem of generating maximally adversarial disturbances for a given controller assuming only blackbox access to it. We propose an online learning approach to this problem that adaptively generates disturbances based on control inputs chosen by the controller. The goal of the disturbance generator is to minimize regret versus a benchmark disturbance-generating policy class, i.e., to maximize the cost incurred by the controller as well as possible compared to the best possible disturbance generator in hindsight (chosen from a benchmark policy class). In the setting where the dynamics are linear and the costs are quadratic, we formulate our problem as an online trust region (OTR) problem with memory and present a new online learning algorithm (MOTR) for this problem. We prove that this method competes with the best disturbance generator in hindsight (chosen from a rich class of benchmark policies that includes linear-dynamical disturbance generating policies). We demonstrate our approach on two simulated examples: (i) synthetically generated linear systems, and (ii) generating wind disturbances for the popular PX4 controller in the AirSim simulator. On these examples, we demonstrate that our approach outperforms several baseline approaches, including $H_{\infty}$ disturbance generation and gradient-based methods.
CHiME-6 Challenge:Tackling Multispeaker Speech Recognition for Unsegmented Recordings
May 02, 2020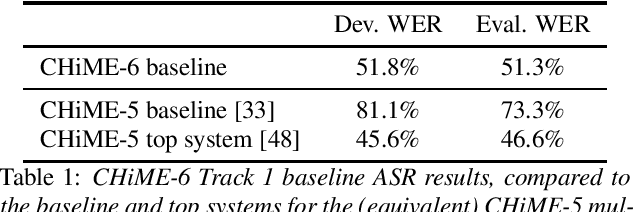

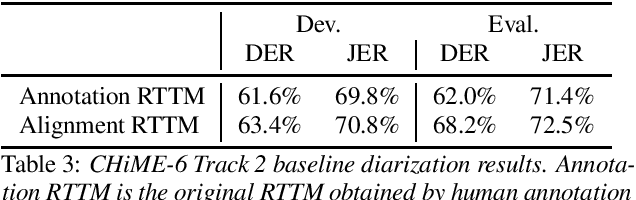
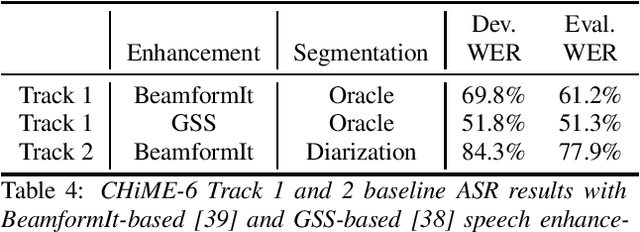
Following the success of the 1st, 2nd, 3rd, 4th and 5th CHiME challenges we organize the 6th CHiME Speech Separation and Recognition Challenge (CHiME-6). The new challenge revisits the previous CHiME-5 challenge and further considers the problem of distant multi-microphone conversational speech diarization and recognition in everyday home environments. Speech material is the same as the previous CHiME-5 recordings except for accurate array synchronization. The material was elicited using a dinner party scenario with efforts taken to capture data that is representative of natural conversational speech. This paper provides a baseline description of the CHiME-6 challenge for both segmented multispeaker speech recognition (Track 1) and unsegmented multispeaker speech recognition (Track 2). Of note, Track 2 is the first challenge activity in the community to tackle an unsegmented multispeaker speech recognition scenario with a complete set of reproducible open source baselines providing speech enhancement, speaker diarization, and speech recognition modules.
Probing the Information Encoded in X-vectors
Sep 30, 2019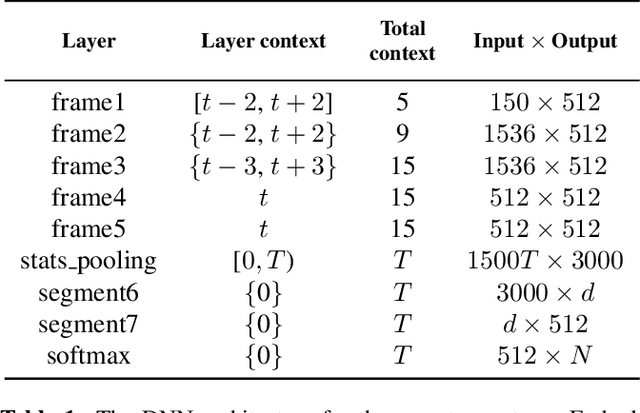
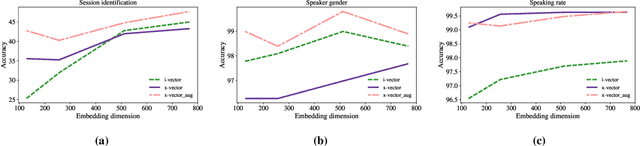
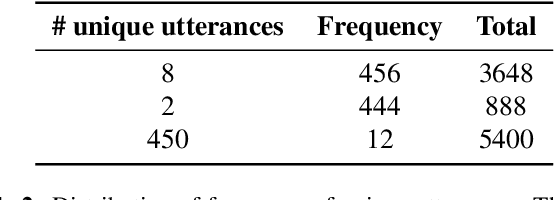
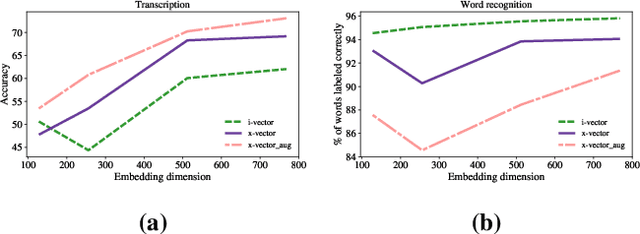
Deep neural network based speaker embeddings, such as x-vectors, have been shown to perform well in text-independent speaker recognition/verification tasks. In this paper, we use simple classifiers to investigate the contents encoded by x-vector embeddings. We probe these embeddings for information related to the speaker, channel, transcription (sentence, words, phones), and meta information about the utterance (duration and augmentation type), and compare these with the information encoded by i-vectors across a varying number of dimensions. We also study the effect of data augmentation during extractor training on the information captured by x-vectors. Experiments on the RedDots data set show that x-vectors capture spoken content and channel-related information, while performing well on speaker verification tasks.