Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrivacy-Preserving Map-Free Exploration for Confirming the Absence of a Radioactive Source
Paper and Code



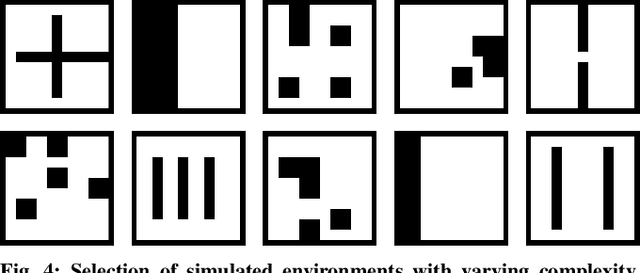
Performing an inspection task while maintaining the privacy of the inspected site is a challenging balancing act. In this work, we are motivated by the future of nuclear arms control verification, which requires both a high level of privacy and guaranteed correctness. For scenarios with limitations on sensors and stored information due to the potentially secret nature of observable features, we propose a robotic verification procedure that provides map-free exploration to perform a source verification task without requiring, nor revealing, any task-irrelevant, site-specific information. We provide theoretical guarantees on the privacy and correctness of our approach, validated by extensive simulated and hardware experiments.
* 10 pages, 6 figures, in submission
View paper on