 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction
Nov 23, 2023A major challenge in deploying the smallest of Micro Aerial Vehicle (MAV) platforms (< 100 g) is their inability to carry sensors that provide high-resolution metric depth information (e.g., LiDAR or stereo cameras). Current systems rely on end-to-end learning or heuristic approaches that directly map images to control inputs, and struggle to fly fast in unknown environments. In this work, we ask the following question: using only a monocular camera, optical odometry, and offboard computation, can we create metrically accurate maps to leverage the powerful path planning and navigation approaches employed by larger state-of-the-art robotic systems to achieve robust autonomy in unknown environments? We present MonoNav: a fast 3D reconstruction and navigation stack for MAVs that leverages recent advances in depth prediction neural networks to enable metrically accurate 3D scene reconstruction from a stream of monocular images and poses. MonoNav uses off-the-shelf pre-trained monocular depth estimation and fusion techniques to construct a map, then searches over motion primitives to plan a collision-free trajectory to the goal. In extensive hardware experiments, we demonstrate how MonoNav enables the Crazyflie (a 37 g MAV) to navigate fast (0.5 m/s) in cluttered indoor environments. We evaluate MonoNav against a state-of-the-art end-to-end approach, and find that the collision rate in navigation is significantly reduced (by a factor of 4). This increased safety comes at the cost of conservatism in terms of a 22% reduction in goal completion.
Online Learning for Obstacle Avoidance
Jun 14, 2023



We approach the fundamental problem of obstacle avoidance for robotic systems via the lens of online learning. In contrast to prior work that either assumes worst-case realizations of uncertainty in the environment or a stationary stochastic model of uncertainty, we propose a method that is efficient to implement and provably grants instance-optimality with respect to perturbations of trajectories generated from an open-loop planner (in the sense of minimizing worst-case regret). The resulting policy adapts online to realizations of uncertainty and provably compares well with the best obstacle avoidance policy in hindsight from a rich class of policies. The method is validated in simulation on a dynamical system environment and compared to baseline open-loop planning and robust Hamilton- Jacobi reachability techniques. Further, it is implemented on a hardware example where a quadruped robot traverses a dense obstacle field and encounters input disturbances due to time delays, model uncertainty, and dynamics nonlinearities.
FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
Oct 12, 2022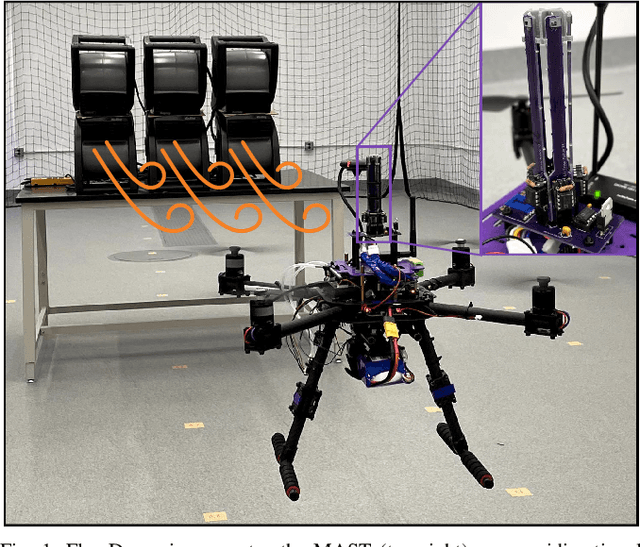
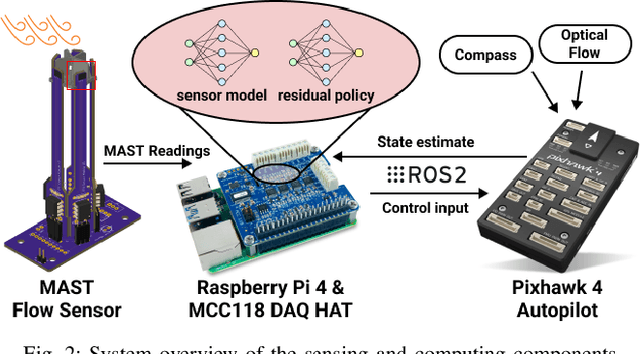
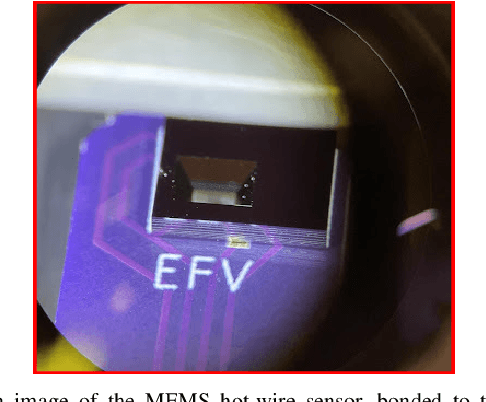

Unmanned aerial vehicles (UAVs) are finding use in applications that place increasing emphasis on robustness to external disturbances including extreme wind. However, traditional multirotor UAV platforms do not directly sense wind; conventional flow sensors are too slow, insensitive, or bulky for widespread integration on UAVs. Instead, drones typically observe the effects of wind indirectly through accumulated errors in position or trajectory tracking. In this work, we integrate a novel flow sensor based on micro-electro-mechanical systems (MEMS) hot-wire technology developed in our prior work onto a multirotor UAV for wind estimation. These sensors are omnidirectional, lightweight, fast, and accurate. In order to achieve superior tracking performance in windy conditions, we train a `wind-aware' residual-based controller via reinforcement learning using simulated wind gusts and their aerodynamic effects on the drone. In extensive hardware experiments, we demonstrate the wind-aware controller outperforming two strong `wind-unaware' baseline controllers in challenging windy conditions.