 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Finetuner's Fallacy: When to Pretrain with Your Finetuning Data
Mar 17, 2026Real-world model deployments demand strong performance on narrow domains where data is often scarce. Typically, practitioners finetune models to specialize them, but this risks overfitting to the domain and forgetting general knowledge. We study a simple strategy, specialized pretraining (SPT), where a small domain dataset, typically reserved for finetuning, is repeated starting from pretraining as a fraction of the total tokens. Across three specialized domains (ChemPile, MusicPile, and ProofPile), SPT improves domain performance and preserves general capabilities after finetuning compared to standard pretraining. In our experiments, SPT reduces the pretraining tokens needed to reach a given domain performance by up to 1.75x. These gains grow when the target domain is underrepresented in the pretraining corpus: on domains far from web text, a 1B SPT model outperforms a 3B standard pretrained model. Beyond these empirical gains, we derive overfitting scaling laws to guide practitioners in selecting the optimal domain-data repetition for a given pretraining compute budget. Our observations reveal the finetuner's fallacy: while finetuning may appear to be the cheapest path to domain adaptation, introducing specialized domain data during pretraining stretches its utility. SPT yields better specialized domain performance (via reduced overfitting across repeated exposures) and better general domain performance (via reduced forgetting during finetuning), ultimately achieving stronger results with fewer parameters and less total compute when amortized over inference. To get the most out of domain data, incorporate it as early in training as possible.
ÜberWeb: Insights from Multilingual Curation for a 20-Trillion-Token Dataset
Feb 16, 2026Multilinguality is a core capability for modern foundation models, yet training high-quality multilingual models remains challenging due to uneven data availability across languages. A further challenge is the performance interference that can arise from joint multilingual training, commonly referred to as the "curse of multilinguality". We study multilingual data curation across thirteen languages and find that many reported regressions are not inherent to multilingual scaling but instead stem from correctable deficiencies in data quality and composition rather than fundamental capacity limits. In controlled bilingual experiments, improving data quality for any single language benefits others: curating English improves non-English performance in 12 of 13 languages, while curating non-English yields reciprocal improvements in English. Bespoke per-language curation produces substantially larger within-language improvements. Extending these findings to large-scale general-purpose training mixtures, we show that curated multilingual allocations comprising under 8% of total tokens remain remarkably effective. We operationalize this approach within an effort that produced a 20T-token pretraining corpus derived entirely from public sources. Models with 3B and 8B parameters trained on a 1T-token random subset achieve competitive multilingual accuracy with 4-10x fewer training FLOPs than strong public baselines, establishing a new Pareto frontier in multilingual performance versus compute. Moreover, these benefits extend to frontier model scale: the 20T-token corpus served as part of the pretraining dataset for Trinity Large (400B/A13B), which exhibits strong multilingual performance relative to its training FLOPs. These results show that targeted, per-language data curation mitigates multilingual interference and enables compute-efficient multilingual scaling.
DatBench: Discriminative, Faithful, and Efficient VLM Evaluations
Jan 05, 2026Empirical evaluation serves as the primary compass guiding research progress in foundation models. Despite a large body of work focused on training frontier vision-language models (VLMs), approaches to their evaluation remain nascent. To guide their maturation, we propose three desiderata that evaluations should satisfy: (1) faithfulness to the modality and application, (2) discriminability between models of varying quality, and (3) efficiency in compute. Through this lens, we identify critical failure modes that violate faithfulness and discriminability, misrepresenting model capabilities: (i) multiple-choice formats reward guessing, poorly reflect downstream use cases, and saturate early as models improve; (ii) blindly solvable questions, which can be answered without images, constitute up to 70% of some evaluations; and (iii) mislabeled or ambiguous samples compromise up to 42% of examples in certain datasets. Regarding efficiency, the computational burden of evaluating frontier models has become prohibitive: by some accounts, nearly 20% of development compute is devoted to evaluation alone. Rather than discarding existing benchmarks, we curate them via transformation and filtering to maximize fidelity and discriminability. We find that converting multiple-choice questions to generative tasks reveals sharp capability drops of up to 35%. In addition, filtering blindly solvable and mislabeled samples improves discriminative power while simultaneously reducing computational cost. We release DatBench-Full, a cleaned evaluation suite of 33 datasets spanning nine VLM capabilities, and DatBench, a discriminative subset that achieves 13x average speedup (up to 50x) while closely matching the discriminative power of the original datasets. Our work outlines a path toward evaluation practices that are both rigorous and sustainable as VLMs continue to scale.
Luxical: High-Speed Lexical-Dense Text Embeddings
Dec 11, 2025Frontier language model quality increasingly hinges on our ability to organize web-scale text corpora for training. Today's dominant tools trade off speed and flexibility: lexical classifiers (e.g., FastText) are fast but limited to producing classification output scores, while the vector-valued outputs of transformer text embedding models flexibly support numerous workflows (e.g., clustering, classification, and retrieval) but are computationally expensive to produce. We introduce Luxical, a library for high-speed "lexical-dense" text embeddings that aims to recover the best properties of both approaches for web-scale text organization. Luxical combines sparse TF--IDF features, a small ReLU network, and a knowledge distillation training regimen to approximate large transformer embedding models at a fraction of their operational cost. In this technical report, we describe the Luxical architecture and training objective and evaluate a concrete Luxical model in two disparate applications: a targeted webcrawl document retrieval test and an end-to-end language model data curation task grounded in text classification. In these tasks we demonstrate speedups ranging from 3x to 100x over varying-sized neural baselines, and comparable to FastText model inference during the data curation task. On these evaluations, the tested Luxical model illustrates favorable compute/quality trade-offs for large-scale text organization, matching the quality of neural baselines. Luxical is available as open-source software at https://github.com/datologyai/luxical.
Reusing Pre-Training Data at Test Time is a Compute Multiplier
Nov 06, 2025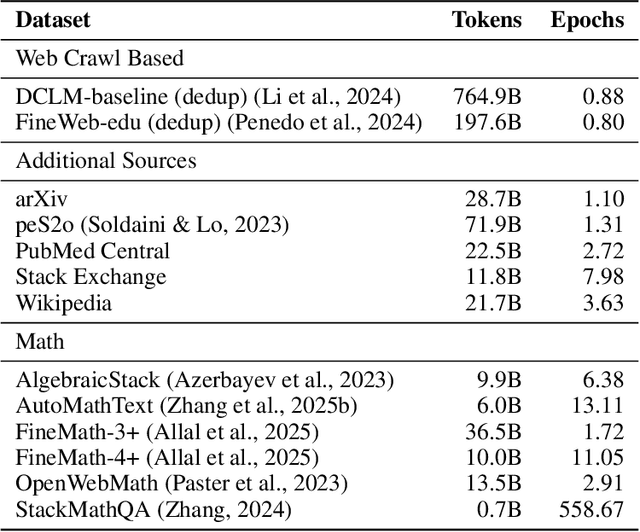
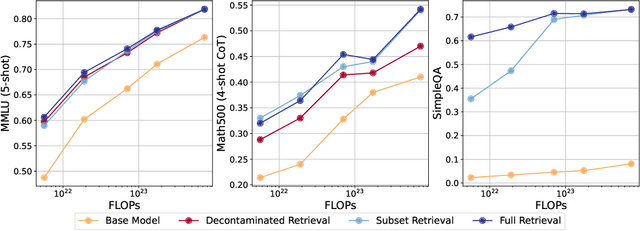
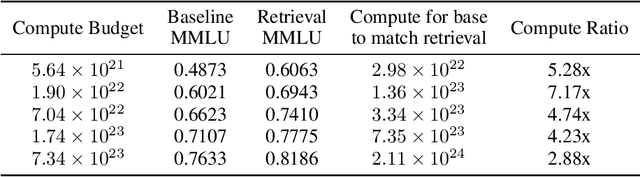
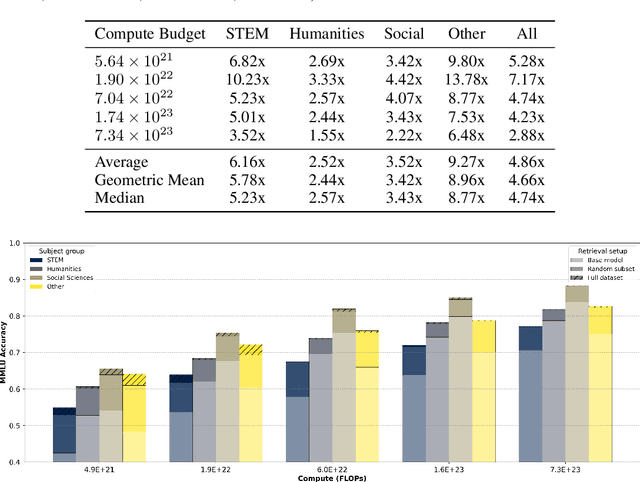
Large language models learn from their vast pre-training corpora, gaining the ability to solve an ever increasing variety of tasks; yet although researchers work to improve these datasets, there is little effort to understand how efficient the pre-training apparatus is at extracting ideas and knowledge from the data. In this work, we use retrieval augmented generation along with test-time compute as a way to quantify how much dataset value was left behind by the process of pre-training, and how this changes across scale. We demonstrate that pre-training then retrieving from standard and largely open-sourced datasets results in significant accuracy gains in MMLU, Math-500, and SimpleQA, which persist through decontamination. For MMLU we observe that retrieval acts as a ~5x compute multiplier versus pre-training alone. We show that these results can be further improved by leveraging additional compute at test time to parse the retrieved context, demonstrating a 10 percentage point improvement on MMLU for the public LLaMA 3.1 8B model. Overall, our results suggest that today's pre-training methods do not make full use of the information in existing pre-training datasets, leaving significant room for progress.
Language Models Improve When Pretraining Data Matches Target Tasks
Jul 16, 2025Every data selection method inherently has a target. In practice, these targets often emerge implicitly through benchmark-driven iteration: researchers develop selection strategies, train models, measure benchmark performance, then refine accordingly. This raises a natural question: what happens when we make this optimization explicit? To explore this, we propose benchmark-targeted ranking (BETR), a simple method that selects pretraining documents based on similarity to benchmark training examples. BETR embeds benchmark examples and a sample of pretraining documents in a shared space, scores this sample by similarity to benchmarks, then trains a lightweight classifier to predict these scores for the full corpus. We compare data selection methods by training over 500 models spanning $10^{19}$ to $10^{22}$ FLOPs and fitting scaling laws to them. From this, we find that simply aligning pretraining data to evaluation benchmarks using BETR achieves a 2.1x compute multiplier over DCLM-Baseline (4.7x over unfiltered data) and improves performance on 9 out of 10 tasks across all scales. BETR also generalizes well: when targeting a diverse set of benchmarks disjoint from our evaluation suite, it still matches or outperforms baselines. Our scaling analysis further reveals a clear trend: larger models require less aggressive filtering. Overall, our findings show that directly matching pretraining data to target tasks precisely shapes model capabilities and highlight that optimal selection strategies must adapt to model scale.
Datasets, Documents, and Repetitions: The Practicalities of Unequal Data Quality
Mar 10, 2025Data filtering has become a powerful tool for improving model performance while reducing computational cost. However, as large language model compute budgets continue to grow, the limited data volume provided by heavily filtered and deduplicated datasets will become a practical constraint. In efforts to better understand how to proceed, we study model performance at various compute budgets and across multiple pre-training datasets created through data filtering and deduplication. We find that, given appropriate modifications to the training recipe, repeating existing aggressively filtered datasets for up to ten epochs can outperform training on the ten times larger superset for a single epoch across multiple compute budget orders of magnitude. While this finding relies on repeating the dataset for many epochs, we also investigate repeats within these datasets at the document level. We find that not all documents within a dataset are equal, and we can create better datasets relative to a token budget by explicitly manipulating the counts of individual documents. We conclude by arguing that even as large language models scale, data filtering remains an important direction of research.
DataComp-LM: In search of the next generation of training sets for language models
Jun 18, 2024



We introduce DataComp for Language Models (DCLM), a testbed for controlled dataset experiments with the goal of improving language models. As part of DCLM, we provide a standardized corpus of 240T tokens extracted from Common Crawl, effective pretraining recipes based on the OpenLM framework, and a broad suite of 53 downstream evaluations. Participants in the DCLM benchmark can experiment with data curation strategies such as deduplication, filtering, and data mixing at model scales ranging from 412M to 7B parameters. As a baseline for DCLM, we conduct extensive experiments and find that model-based filtering is key to assembling a high-quality training set. The resulting dataset, DCLM-Baseline enables training a 7B parameter language model from scratch to 64% 5-shot accuracy on MMLU with 2.6T training tokens. Compared to MAP-Neo, the previous state-of-the-art in open-data language models, DCLM-Baseline represents a 6.6 percentage point improvement on MMLU while being trained with 40% less compute. Our baseline model is also comparable to Mistral-7B-v0.3 and Llama 3 8B on MMLU (63% & 66%), and performs similarly on an average of 53 natural language understanding tasks while being trained with 6.6x less compute than Llama 3 8B. Our results highlight the importance of dataset design for training language models and offer a starting point for further research on data curation.
CLIPLoss and Norm-Based Data Selection Methods for Multimodal Contrastive Learning
May 29, 2024Data selection has emerged as a core issue for large-scale visual-language model pretaining (e.g., CLIP), particularly with noisy web-curated datasets. Three main data selection approaches are: (1) leveraging external non-CLIP models to aid data selection, (2) training new CLIP-style embedding models that are more effective at selecting high-quality data than the original OpenAI CLIP model, and (3) designing better metrics or strategies universally applicable to any CLIP embedding without requiring specific model properties (e.g., CLIPScore is one popular metric). While the first two approaches have been extensively studied, the third remains under-explored. In this paper, we advance the third approach by proposing two new methods. Firstly, instead of classical CLIP scores that only consider the alignment between two modalities from a single sample, we introduce negCLIPLoss, a CLIP loss-inspired method that adds the alignment between one sample and its contrastive pairs as an extra normalization term for better quality measurement. Secondly, when downstream tasks are known, we propose a new norm-based metric, NormSim, to measure the similarity between pretraining data and target data. We test our methods on the data selection benchmark, DataComp~\cite{gadre2023datacomp}. Compared to the best baseline using only OpenAI's CLIP-L/14, our methods achieve a 5.3\% improvement on ImageNet-1k and a 2.8\% improvement on 38 downstream evaluation tasks. Moreover, both negCLIPLoss and NormSim are compatible with existing techniques. By combining our methods with the current best methods DFN~\cite{fang2023data} and HYPE~\cite{kim2024hype}, we can boost average performance on downstream tasks by 0.9\%, achieving a new state-of-the-art.
URDFormer: A Pipeline for Constructing Articulated Simulation Environments from Real-World Images
May 19, 2024



Constructing simulation scenes that are both visually and physically realistic is a problem of practical interest in domains ranging from robotics to computer vision. This problem has become even more relevant as researchers wielding large data-hungry learning methods seek new sources of training data for physical decision-making systems. However, building simulation models is often still done by hand. A graphic designer and a simulation engineer work with predefined assets to construct rich scenes with realistic dynamic and kinematic properties. While this may scale to small numbers of scenes, to achieve the generalization properties that are required for data-driven robotic control, we require a pipeline that is able to synthesize large numbers of realistic scenes, complete with 'natural' kinematic and dynamic structures. To attack this problem, we develop models for inferring structure and generating simulation scenes from natural images, allowing for scalable scene generation from web-scale datasets. To train these image-to-simulation models, we show how controllable text-to-image generative models can be used in generating paired training data that allows for modeling of the inverse problem, mapping from realistic images back to complete scene models. We show how this paradigm allows us to build large datasets of scenes in simulation with semantic and physical realism. We present an integrated end-to-end pipeline that generates simulation scenes complete with articulated kinematic and dynamic structures from real-world images and use these for training robotic control policies. We then robustly deploy in the real world for tasks like articulated object manipulation. In doing so, our work provides both a pipeline for large-scale generation of simulation environments and an integrated system for training robust robotic control policies in the resulting environments.