 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Convergence of Four-Layer Matrix Factorization under Random Initialization
Nov 19, 2025Gradient descent dynamics on the deep matrix factorization problem is extensively studied as a simplified theoretical model for deep neural networks. Although the convergence theory for two-layer matrix factorization is well-established, no global convergence guarantee for general deep matrix factorization under random initialization has been established to date. To address this gap, we provide a polynomial-time global convergence guarantee for randomly initialized gradient descent on four-layer matrix factorization, given certain conditions on the target matrix and a standard balanced regularization term. Our analysis employs new techniques to show saddle-avoidance properties of gradient decent dynamics, and extends previous theories to characterize the change in eigenvalues of layer weights.
RLVE: Scaling Up Reinforcement Learning for Language Models with Adaptive Verifiable Environments
Nov 10, 2025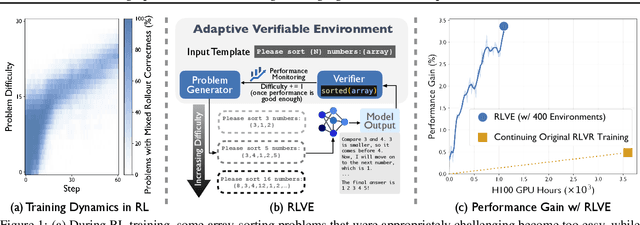
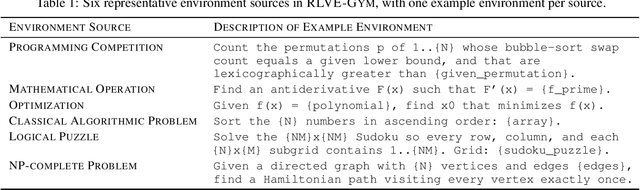
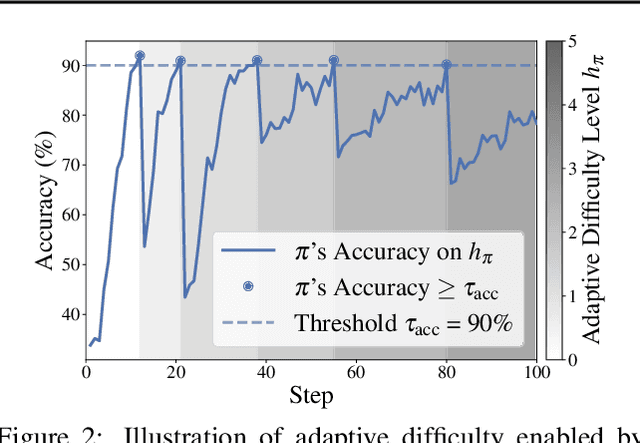
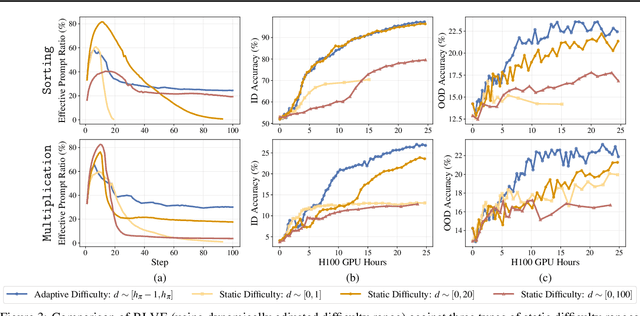
We introduce Reinforcement Learning (RL) with Adaptive Verifiable Environments (RLVE), an approach using verifiable environments that procedurally generate problems and provide algorithmically verifiable rewards, to scale up RL for language models (LMs). RLVE enables each verifiable environment to dynamically adapt its problem difficulty distribution to the policy model's capabilities as training progresses. In contrast, static data distributions often lead to vanishing learning signals when problems are either too easy or too hard for the policy. To implement RLVE, we create RLVE-Gym, a large-scale suite of 400 verifiable environments carefully developed through manual environment engineering. Using RLVE-Gym, we show that environment scaling, i.e., expanding the collection of training environments, consistently improves generalizable reasoning capabilities. RLVE with joint training across all 400 environments in RLVE-Gym yields a 3.37% absolute average improvement across six reasoning benchmarks, starting from one of the strongest 1.5B reasoning LMs. By comparison, continuing this LM's original RL training yields only a 0.49% average absolute gain despite using over 3x more compute. We release our code publicly.
Spurious Rewards: Rethinking Training Signals in RLVR
Jun 12, 2025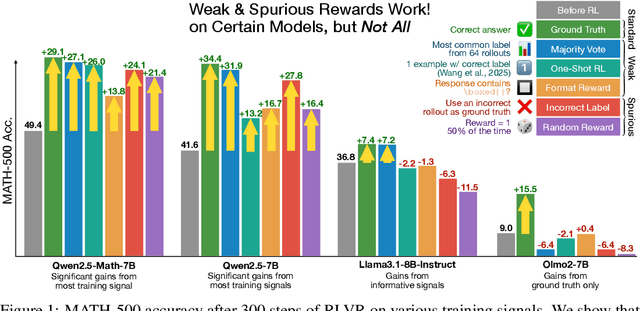
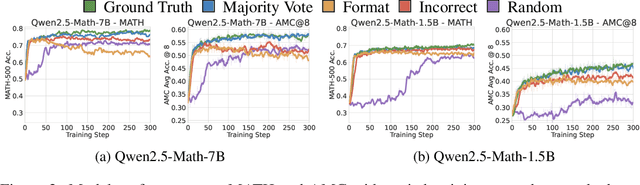
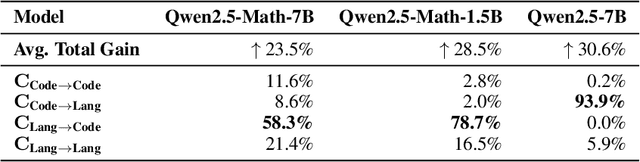
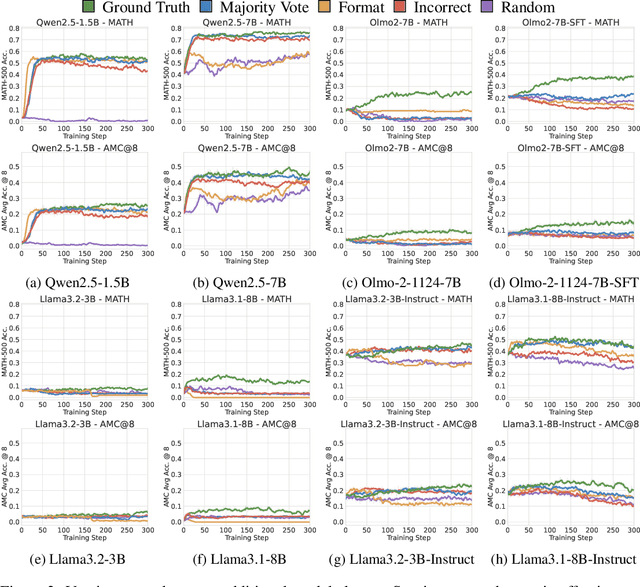
We show that reinforcement learning with verifiable rewards (RLVR) can elicit strong mathematical reasoning in certain models even with spurious rewards that have little, no, or even negative correlation with the correct answer. For example, RLVR improves MATH-500 performance for Qwen2.5-Math-7B in absolute points by 21.4% (random reward), 13.8% (format reward), 24.1% (incorrect label), 26.0% (1-shot RL), and 27.1% (majority voting) -- nearly matching the 29.1% gained with ground truth rewards. However, the spurious rewards that work for Qwen often fail to yield gains with other model families like Llama3 or OLMo2. In particular, we find code reasoning -- thinking in code without actual code execution -- to be a distinctive Qwen2.5-Math behavior that becomes significantly more frequent after RLVR, from 65% to over 90%, even with spurious rewards. Overall, we hypothesize that, given the lack of useful reward signal, RLVR must somehow be surfacing useful reasoning representations learned during pretraining, although the exact mechanism remains a topic for future work. We suggest that future RLVR research should possibly be validated on diverse models rather than a single de facto choice, as we show that it is easy to get significant performance gains on Qwen models even with completely spurious reward signals.
Policy-Based Trajectory Clustering in Offline Reinforcement Learning
Jun 12, 2025We introduce a novel task of clustering trajectories from offline reinforcement learning (RL) datasets, where each cluster center represents the policy that generated its trajectories. By leveraging the connection between the KL-divergence of offline trajectory distributions and a mixture of policy-induced distributions, we formulate a natural clustering objective. To solve this, we propose Policy-Guided K-means (PG-Kmeans) and Centroid-Attracted Autoencoder (CAAE). PG-Kmeans iteratively trains behavior cloning (BC) policies and assigns trajectories based on policy generation probabilities, while CAAE resembles the VQ-VAE framework by guiding the latent representations of trajectories toward the vicinity of specific codebook entries to achieve clustering. Theoretically, we prove the finite-step convergence of PG-Kmeans and identify a key challenge in offline trajectory clustering: the inherent ambiguity of optimal solutions due to policy-induced conflicts, which can result in multiple equally valid but structurally distinct clusterings. Experimentally, we validate our methods on the widely used D4RL dataset and custom GridWorld environments. Our results show that both PG-Kmeans and CAAE effectively partition trajectories into meaningful clusters. They offer a promising framework for policy-based trajectory clustering, with broad applications in offline RL and beyond.
Chasing Moving Targets with Online Self-Play Reinforcement Learning for Safer Language Models
Jun 09, 2025Conventional language model (LM) safety alignment relies on a reactive, disjoint procedure: attackers exploit a static model, followed by defensive fine-tuning to patch exposed vulnerabilities. This sequential approach creates a mismatch -- attackers overfit to obsolete defenses, while defenders perpetually lag behind emerging threats. To address this, we propose Self-RedTeam, an online self-play reinforcement learning algorithm where an attacker and defender agent co-evolve through continuous interaction. We cast safety alignment as a two-player zero-sum game, where a single model alternates between attacker and defender roles -- generating adversarial prompts and safeguarding against them -- while a reward LM adjudicates outcomes. This enables dynamic co-adaptation. Grounded in the game-theoretic framework of zero-sum games, we establish a theoretical safety guarantee which motivates the design of our method: if self-play converges to a Nash Equilibrium, the defender will reliably produce safe responses to any adversarial input. Empirically, Self-RedTeam uncovers more diverse attacks (+21.8% SBERT) compared to attackers trained against static defenders and achieves higher robustness on safety benchmarks (e.g., +65.5% on WildJailBreak) than defenders trained against static attackers. We further propose hidden Chain-of-Thought, allowing agents to plan privately, which boosts adversarial diversity and reduces over-refusals. Our results motivate a shift from reactive patching to proactive co-evolution in LM safety training, enabling scalable, autonomous, and robust self-improvement of LMs via multi-agent reinforcement learning (MARL).
Highlighting What Matters: Promptable Embeddings for Attribute-Focused Image Retrieval
May 21, 2025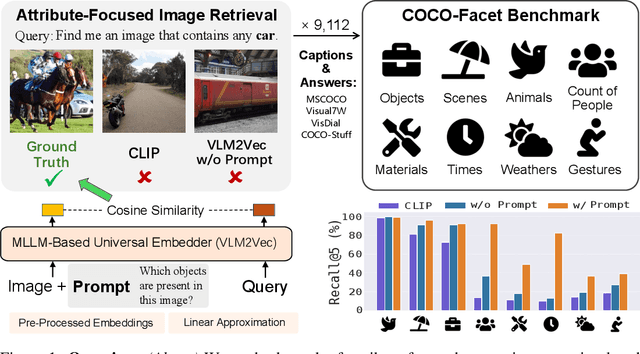
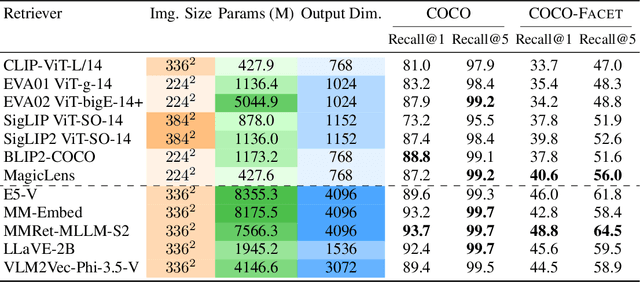
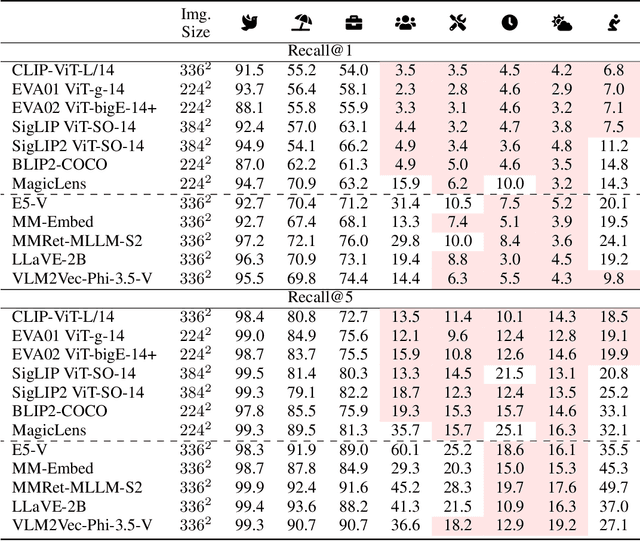
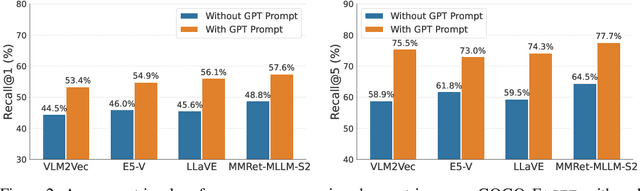
While an image is worth more than a thousand words, only a few provide crucial information for a given task and thus should be focused on. In light of this, ideal text-to-image (T2I) retrievers should prioritize specific visual attributes relevant to queries. To evaluate current retrievers on handling attribute-focused queries, we build COCO-Facet, a COCO-based benchmark with 9,112 queries about diverse attributes of interest. We find that CLIP-like retrievers, which are widely adopted due to their efficiency and zero-shot ability, have poor and imbalanced performance, possibly because their image embeddings focus on global semantics and subjects while leaving out other details. Notably, we reveal that even recent Multimodal Large Language Model (MLLM)-based, stronger retrievers with a larger output dimension struggle with this limitation. Hence, we hypothesize that retrieving with general image embeddings is suboptimal for performing such queries. As a solution, we propose to use promptable image embeddings enabled by these multimodal retrievers, which boost performance by highlighting required attributes. Our pipeline for deriving such embeddings generalizes across query types, image pools, and base retriever architectures. To enhance real-world applicability, we offer two acceleration strategies: Pre-processing promptable embeddings and using linear approximations. We show that the former yields a 15% improvement in Recall@5 when prompts are predefined, while the latter achieves an 8% improvement when prompts are only available during inference.
Reinforcement Learning for Reasoning in Large Language Models with One Training Example
Apr 29, 2025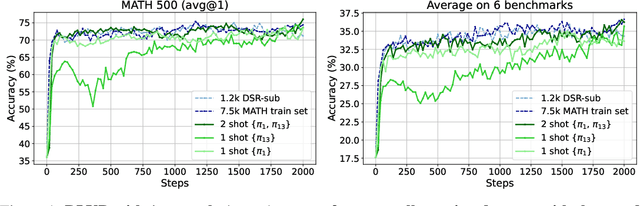
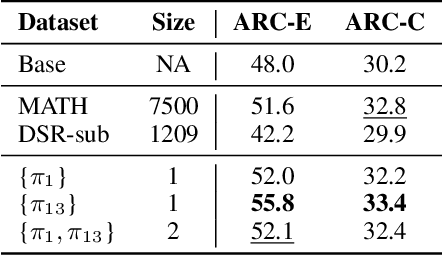
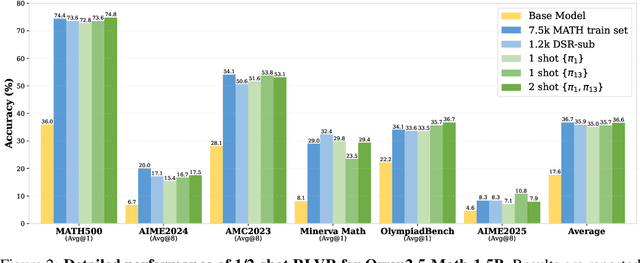
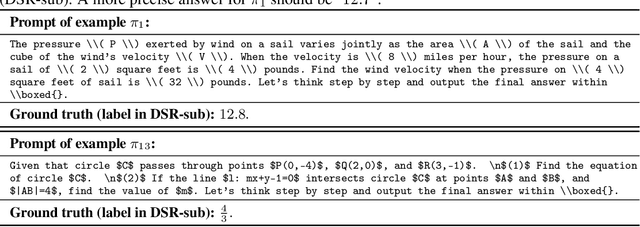
We show that reinforcement learning with verifiable reward using one training example (1-shot RLVR) is effective in incentivizing the math reasoning capabilities of large language models (LLMs). Applying RLVR to the base model Qwen2.5-Math-1.5B, we identify a single example that elevates model performance on MATH500 from 36.0% to 73.6%, and improves the average performance across six common mathematical reasoning benchmarks from 17.6% to 35.7%. This result matches the performance obtained using the 1.2k DeepScaleR subset (MATH500: 73.6%, average: 35.9%), which includes the aforementioned example. Similar substantial improvements are observed across various models (Qwen2.5-Math-7B, Llama3.2-3B-Instruct, DeepSeek-R1-Distill-Qwen-1.5B), RL algorithms (GRPO and PPO), and different math examples (many of which yield approximately 30% or greater improvement on MATH500 when employed as a single training example). In addition, we identify some interesting phenomena during 1-shot RLVR, including cross-domain generalization, increased frequency of self-reflection, and sustained test performance improvement even after the training accuracy has saturated, a phenomenon we term post-saturation generalization. Moreover, we verify that the effectiveness of 1-shot RLVR primarily arises from the policy gradient loss, distinguishing it from the "grokking" phenomenon. We also show the critical role of promoting exploration (e.g., by adding entropy loss with an appropriate coefficient) in 1-shot RLVR training. As a bonus, we observe that applying entropy loss alone, without any outcome reward, significantly enhances Qwen2.5-Math-1.5B's performance on MATH500 by 27.4%. These findings can inspire future work on RLVR data efficiency and encourage a re-examination of both recent progress and the underlying mechanisms in RLVR. Our code, model, and data are open source at https://github.com/ypwang61/One-Shot-RLVR
LoRe: Personalizing LLMs via Low-Rank Reward Modeling
Apr 20, 2025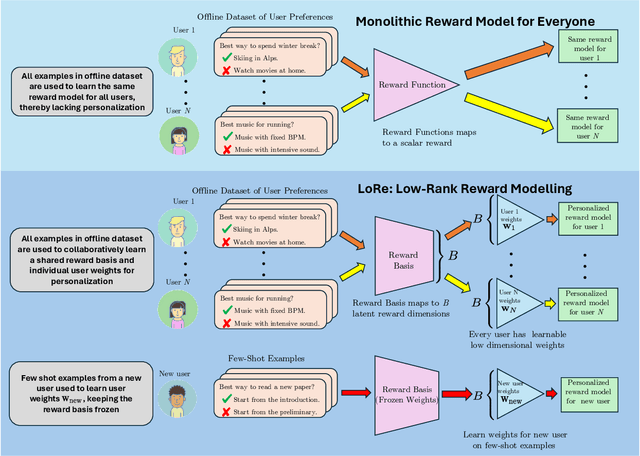
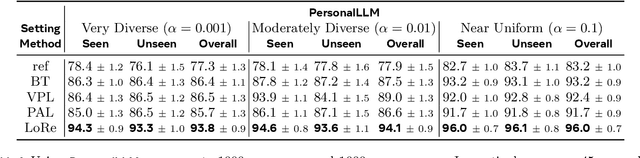
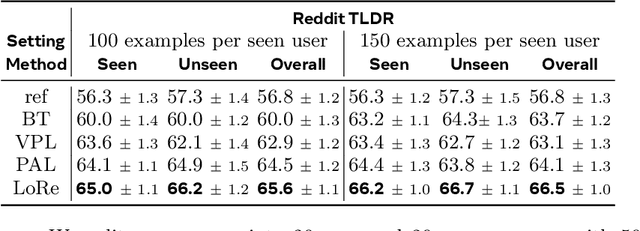
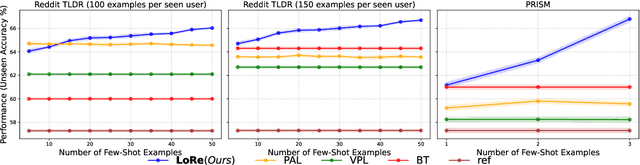
Personalizing large language models (LLMs) to accommodate diverse user preferences is essential for enhancing alignment and user satisfaction. Traditional reinforcement learning from human feedback (RLHF) approaches often rely on monolithic value representations, limiting their ability to adapt to individual preferences. We introduce a novel framework that leverages low-rank preference modeling to efficiently learn and generalize user-specific reward functions. By representing reward functions in a low-dimensional subspace and modeling individual preferences as weighted combinations of shared basis functions, our approach avoids rigid user categorization while enabling scalability and few-shot adaptation. We validate our method on multiple preference datasets, demonstrating superior generalization to unseen users and improved accuracy in preference prediction tasks.
SHARP: Accelerating Language Model Inference by SHaring Adjacent layers with Recovery Parameters
Feb 11, 2025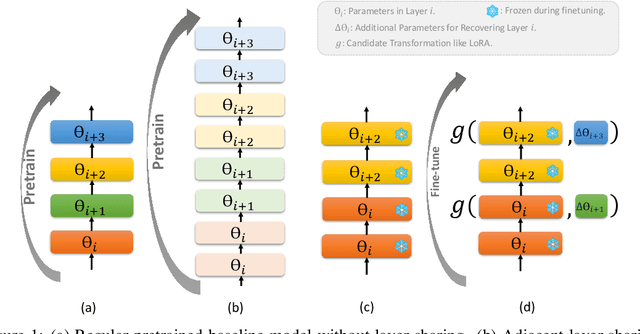
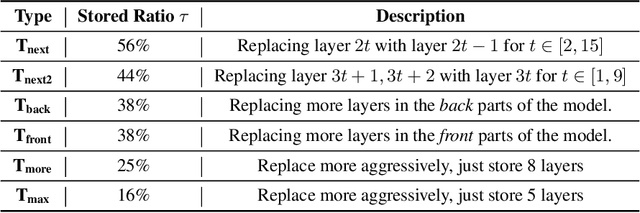
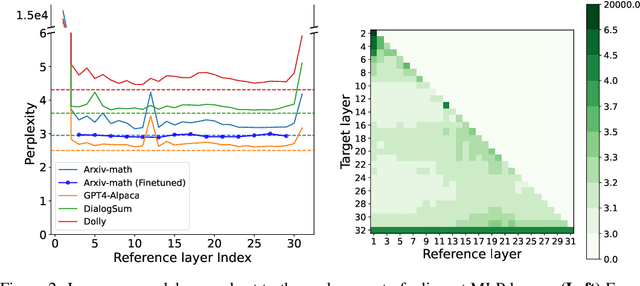
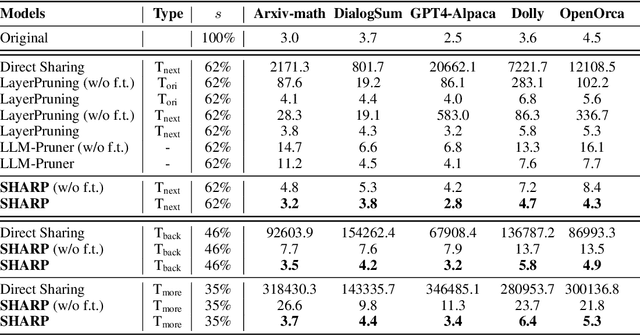
While Large language models (LLMs) have advanced natural language processing tasks, their growing computational and memory demands make deployment on resource-constrained devices like mobile phones increasingly challenging. In this paper, we propose SHARP (SHaring Adjacent Layers with Recovery Parameters), a novel approach to accelerate LLM inference by sharing parameters across adjacent layers, thus reducing memory load overhead, while introducing low-rank recovery parameters to maintain performance. Inspired by observations that consecutive layers have similar outputs, SHARP employs a two-stage recovery process: Single Layer Warmup (SLW), and Supervised Fine-Tuning (SFT). The SLW stage aligns the outputs of the shared layers using L_2 loss, providing a good initialization for the following SFT stage to further restore the model performance. Extensive experiments demonstrate that SHARP can recover the model's perplexity on various in-distribution tasks using no more than 50k fine-tuning data while reducing the number of stored MLP parameters by 38% to 65%. We also conduct several ablation studies of SHARP and show that replacing layers towards the later parts of the model yields better performance retention, and that different recovery parameterizations perform similarly when parameter counts are matched. Furthermore, SHARP saves 42.8% in model storage and reduces the total inference time by 42.2% compared to the original Llama2-7b model on mobile devices. Our results highlight SHARP as an efficient solution for reducing inference costs in deploying LLMs without the need for pretraining-scale resources.
Is Your World Simulator a Good Story Presenter? A Consecutive Events-Based Benchmark for Future Long Video Generation
Dec 17, 2024
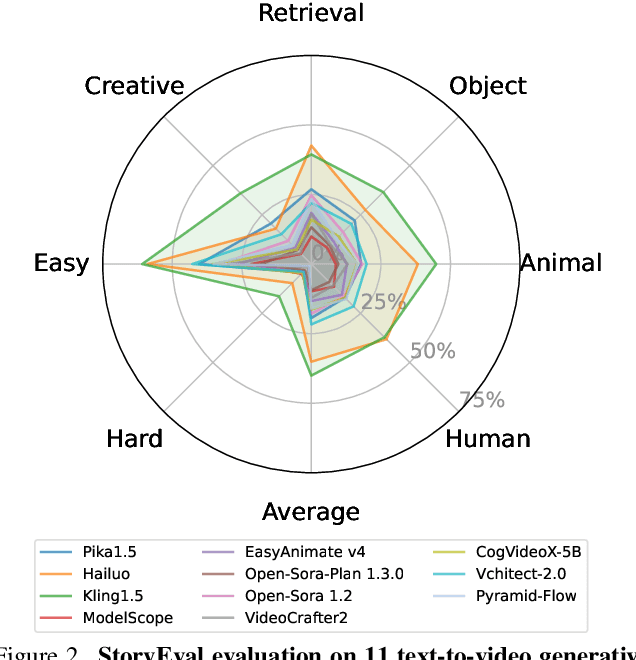

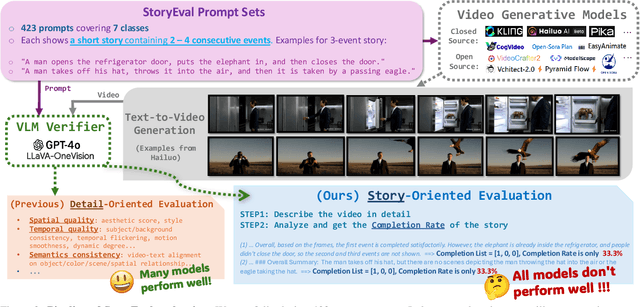
The current state-of-the-art video generative models can produce commercial-grade videos with highly realistic details. However, they still struggle to coherently present multiple sequential events in the stories specified by the prompts, which is foreseeable an essential capability for future long video generation scenarios. For example, top T2V generative models still fail to generate a video of the short simple story 'how to put an elephant into a refrigerator.' While existing detail-oriented benchmarks primarily focus on fine-grained metrics like aesthetic quality and spatial-temporal consistency, they fall short of evaluating models' abilities to handle event-level story presentation. To address this gap, we introduce StoryEval, a story-oriented benchmark specifically designed to assess text-to-video (T2V) models' story-completion capabilities. StoryEval features 423 prompts spanning 7 classes, each representing short stories composed of 2-4 consecutive events. We employ advanced vision-language models, such as GPT-4V and LLaVA-OV-Chat-72B, to verify the completion of each event in the generated videos, applying a unanimous voting method to enhance reliability. Our methods ensure high alignment with human evaluations, and the evaluation of 11 models reveals its challenge, with none exceeding an average story-completion rate of 50%. StoryEval provides a new benchmark for advancing T2V models and highlights the challenges and opportunities in developing next-generation solutions for coherent story-driven video generation.