 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
ConceptGraphs: Open-Vocabulary 3D Scene Graphs for Perception and Planning
Sep 28, 2023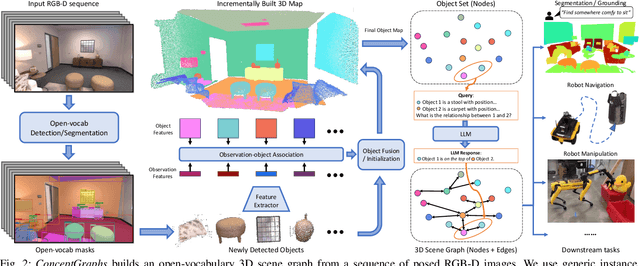
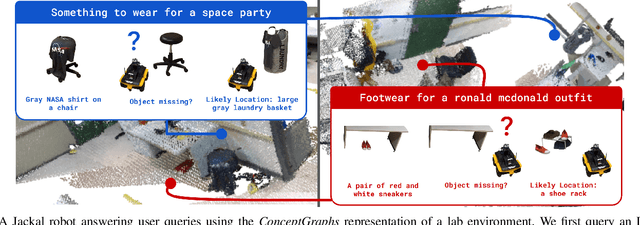
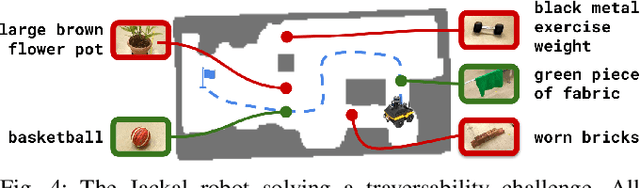
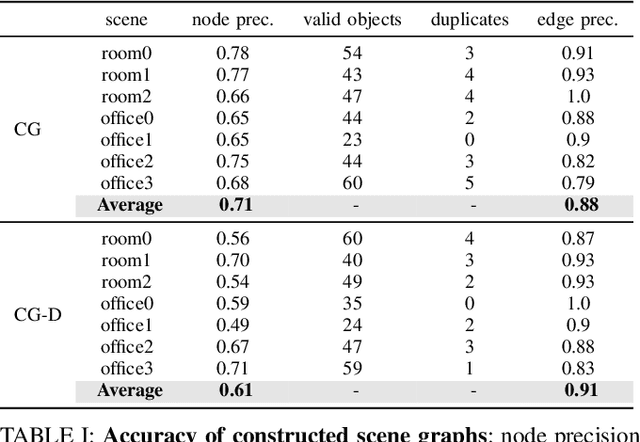
For robots to perform a wide variety of tasks, they require a 3D representation of the world that is semantically rich, yet compact and efficient for task-driven perception and planning. Recent approaches have attempted to leverage features from large vision-language models to encode semantics in 3D representations. However, these approaches tend to produce maps with per-point feature vectors, which do not scale well in larger environments, nor do they contain semantic spatial relationships between entities in the environment, which are useful for downstream planning. In this work, we propose ConceptGraphs, an open-vocabulary graph-structured representation for 3D scenes. ConceptGraphs is built by leveraging 2D foundation models and fusing their output to 3D by multi-view association. The resulting representations generalize to novel semantic classes, without the need to collect large 3D datasets or finetune models. We demonstrate the utility of this representation through a number of downstream planning tasks that are specified through abstract (language) prompts and require complex reasoning over spatial and semantic concepts. (Project page: https://concept-graphs.github.io/ Explainer video: https://youtu.be/mRhNkQwRYnc )