 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$π^{*}_{0.6}$: a VLA That Learns From Experience
Nov 19, 2025We study how vision-language-action (VLA) models can improve through real-world deployments via reinforcement learning (RL). We present a general-purpose method, RL with Experience and Corrections via Advantage-conditioned Policies (RECAP), that provides for RL training of VLAs via advantage conditioning. Our method incorporates heterogeneous data into the self-improvement process, including demonstrations, data from on-policy collection, and expert teleoperated interventions provided during autonomous execution. RECAP starts by pre-training a generalist VLA with offline RL, which we call $π^{*}_{0.6}$, that can then be specialized to attain high performance on downstream tasks through on-robot data collection. We show that the $π^{*}_{0.6}$ model trained with the full RECAP method can fold laundry in real homes, reliably assemble boxes, and make espresso drinks using a professional espresso machine. On some of the hardest tasks, RECAP more than doubles task throughput and roughly halves the task failure rate.
Robo-DM: Data Management For Large Robot Datasets
May 21, 2025
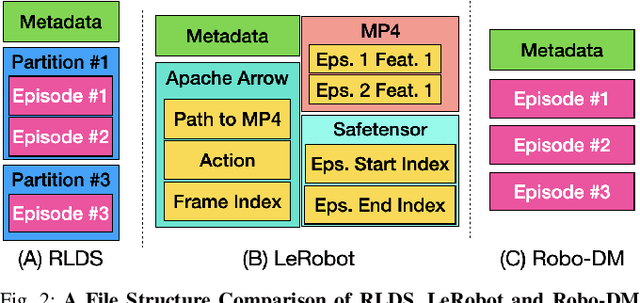


Recent results suggest that very large datasets of teleoperated robot demonstrations can be used to train transformer-based models that have the potential to generalize to new scenes, robots, and tasks. However, curating, distributing, and loading large datasets of robot trajectories, which typically consist of video, textual, and numerical modalities - including streams from multiple cameras - remains challenging. We propose Robo-DM, an efficient open-source cloud-based data management toolkit for collecting, sharing, and learning with robot data. With Robo-DM, robot datasets are stored in a self-contained format with Extensible Binary Meta Language (EBML). Robo-DM can significantly reduce the size of robot trajectory data, transfer costs, and data load time during training. Compared to the RLDS format used in OXE datasets, Robo-DM's compression saves space by up to 70x (lossy) and 3.5x (lossless). Robo-DM also accelerates data retrieval by load-balancing video decoding with memory-mapped decoding caches. Compared to LeRobot, a framework that also uses lossy video compression, Robo-DM is up to 50x faster when decoding sequentially. We physically evaluate a model trained by Robo-DM with lossy compression, a pick-and-place task, and In-Context Robot Transformer. Robo-DM uses 75x compression of the original dataset and does not suffer reduction in downstream task accuracy.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
A Taxonomy for Evaluating Generalist Robot Policies
Mar 03, 2025Machine learning for robotics promises to unlock generalization to novel tasks and environments. Guided by this promise, many recent works have focused on scaling up robot data collection and developing larger, more expressive policies to achieve this. But how do we measure progress towards this goal of policy generalization in practice? Evaluating and quantifying generalization is the Wild West of modern robotics, with each work proposing and measuring different types of generalization in their own, often difficult to reproduce, settings. In this work, our goal is (1) to outline the forms of generalization we believe are important in robot manipulation in a comprehensive and fine-grained manner, and (2) to provide reproducible guidelines for measuring these notions of generalization. We first propose STAR-Gen, a taxonomy of generalization for robot manipulation structured around visual, semantic, and behavioral generalization. We discuss how our taxonomy encompasses most prior notions of generalization in robotics. Next, we instantiate STAR-Gen with a concrete real-world benchmark based on the widely-used Bridge V2 dataset. We evaluate a variety of state-of-the-art models on this benchmark to demonstrate the utility of our taxonomy in practice. Our taxonomy of generalization can yield many interesting insights into existing models: for example, we observe that current vision-language-action models struggle with various types of semantic generalization, despite the promise of pre-training on internet-scale language datasets. We believe STAR-Gen and our guidelines can improve the dissemination and evaluation of progress towards generalization in robotics, which we hope will guide model design and future data collection efforts. We provide videos and demos at our website stargen-taxonomy.github.io.
Robot Data Curation with Mutual Information Estimators
Feb 12, 2025The performance of imitation learning policies often hinges on the datasets with which they are trained. Consequently, investment in data collection for robotics has grown across both industrial and academic labs. However, despite the marked increase in the quantity of demonstrations collected, little work has sought to assess the quality of said data despite mounting evidence of its importance in other areas such as vision and language. In this work, we take a critical step towards addressing the data quality in robotics. Given a dataset of demonstrations, we aim to estimate the relative quality of individual demonstrations in terms of both state diversity and action predictability. To do so, we estimate the average contribution of a trajectory towards the mutual information between states and actions in the entire dataset, which precisely captures both the entropy of the state distribution and the state-conditioned entropy of actions. Though commonly used mutual information estimators require vast amounts of data often beyond the scale available in robotics, we introduce a novel technique based on k-nearest neighbor estimates of mutual information on top of simple VAE embeddings of states and actions. Empirically, we demonstrate that our approach is able to partition demonstration datasets by quality according to human expert scores across a diverse set of benchmarks spanning simulation and real world environments. Moreover, training policies based on data filtered by our method leads to a 5-10% improvement in RoboMimic and better performance on real ALOHA and Franka setups.
GHIL-Glue: Hierarchical Control with Filtered Subgoal Images
Oct 26, 2024

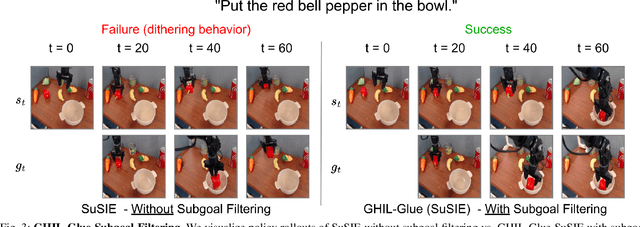
Image and video generative models that are pre-trained on Internet-scale data can greatly increase the generalization capacity of robot learning systems. These models can function as high-level planners, generating intermediate subgoals for low-level goal-conditioned policies to reach. However, the performance of these systems can be greatly bottlenecked by the interface between generative models and low-level controllers. For example, generative models may predict photorealistic yet physically infeasible frames that confuse low-level policies. Low-level policies may also be sensitive to subtle visual artifacts in generated goal images. This paper addresses these two facets of generalization, providing an interface to effectively "glue together" language-conditioned image or video prediction models with low-level goal-conditioned policies. Our method, Generative Hierarchical Imitation Learning-Glue (GHIL-Glue), filters out subgoals that do not lead to task progress and improves the robustness of goal-conditioned policies to generated subgoals with harmful visual artifacts. We find in extensive experiments in both simulated and real environments that GHIL-Glue achieves a 25% improvement across several hierarchical models that leverage generative subgoals, achieving a new state-of-the-art on the CALVIN simulation benchmark for policies using observations from a single RGB camera. GHIL-Glue also outperforms other generalist robot policies across 3/4 language-conditioned manipulation tasks testing zero-shot generalization in physical experiments.
Language-Embedded Gaussian Splats (LEGS): Incrementally Building Room-Scale Representations with a Mobile Robot
Sep 26, 2024
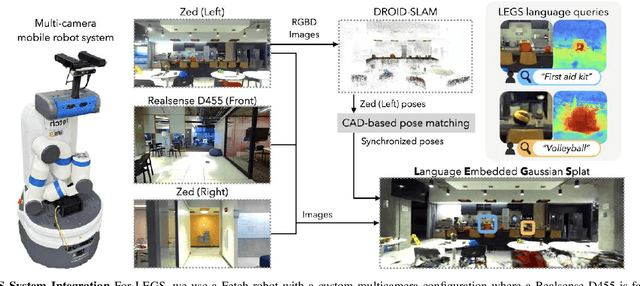

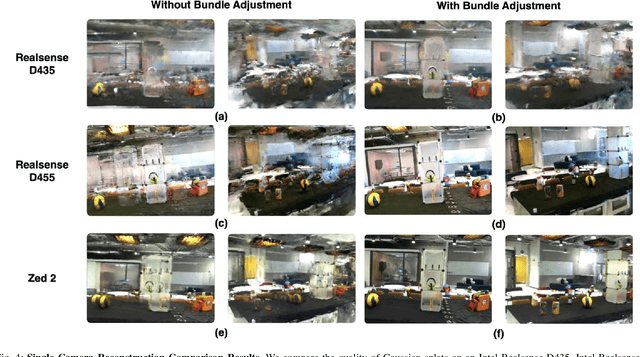
Building semantic 3D maps is valuable for searching for objects of interest in offices, warehouses, stores, and homes. We present a mapping system that incrementally builds a Language-Embedded Gaussian Splat (LEGS): a detailed 3D scene representation that encodes both appearance and semantics in a unified representation. LEGS is trained online as a robot traverses its environment to enable localization of open-vocabulary object queries. We evaluate LEGS on 4 room-scale scenes where we query for objects in the scene to assess how LEGS can capture semantic meaning. We compare LEGS to LERF and find that while both systems have comparable object query success rates, LEGS trains over 3.5x faster than LERF. Results suggest that a multi-camera setup and incremental bundle adjustment can boost visual reconstruction quality in constrained robot trajectories, and suggest LEGS can localize open-vocabulary and long-tail object queries with up to 66% accuracy.
OpenVLA: An Open-Source Vision-Language-Action Model
Jun 13, 2024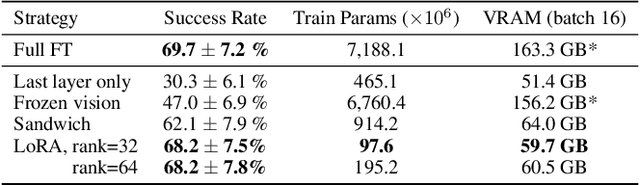
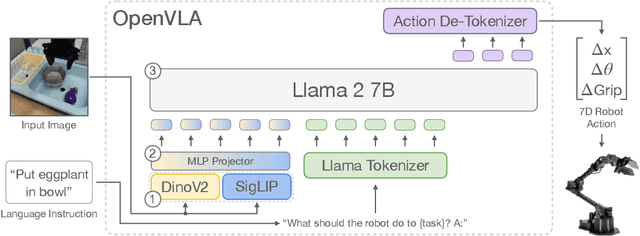
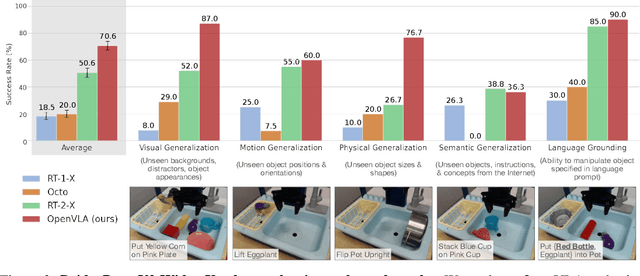
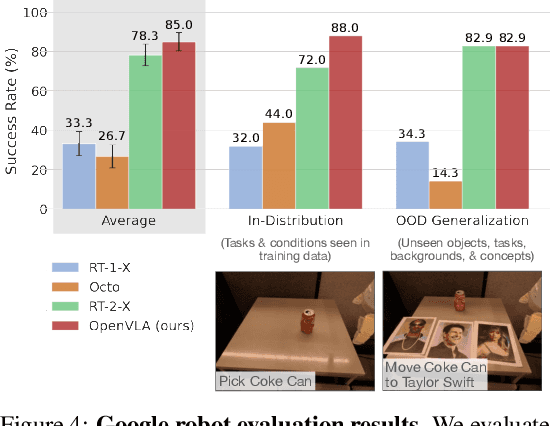
Large policies pretrained on a combination of Internet-scale vision-language data and diverse robot demonstrations have the potential to change how we teach robots new skills: rather than training new behaviors from scratch, we can fine-tune such vision-language-action (VLA) models to obtain robust, generalizable policies for visuomotor control. Yet, widespread adoption of VLAs for robotics has been challenging as 1) existing VLAs are largely closed and inaccessible to the public, and 2) prior work fails to explore methods for efficiently fine-tuning VLAs for new tasks, a key component for adoption. Addressing these challenges, we introduce OpenVLA, a 7B-parameter open-source VLA trained on a diverse collection of 970k real-world robot demonstrations. OpenVLA builds on a Llama 2 language model combined with a visual encoder that fuses pretrained features from DINOv2 and SigLIP. As a product of the added data diversity and new model components, OpenVLA demonstrates strong results for generalist manipulation, outperforming closed models such as RT-2-X (55B) by 16.5% in absolute task success rate across 29 tasks and multiple robot embodiments, with 7x fewer parameters. We further show that we can effectively fine-tune OpenVLA for new settings, with especially strong generalization results in multi-task environments involving multiple objects and strong language grounding abilities, and outperform expressive from-scratch imitation learning methods such as Diffusion Policy by 20.4%. We also explore compute efficiency; as a separate contribution, we show that OpenVLA can be fine-tuned on consumer GPUs via modern low-rank adaptation methods and served efficiently via quantization without a hit to downstream success rate. Finally, we release model checkpoints, fine-tuning notebooks, and our PyTorch codebase with built-in support for training VLAs at scale on Open X-Embodiment datasets.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Prismatic VLMs: Investigating the Design Space of Visually-Conditioned Language Models
Feb 12, 2024



Visually-conditioned language models (VLMs) have seen growing adoption in applications such as visual dialogue, scene understanding, and robotic task planning; adoption that has fueled a wealth of new models such as LLaVa, InstructBLIP, and PaLI-3. Despite the volume of new releases, key design decisions around image preprocessing, architecture, and optimization are under-explored, making it challenging to understand what factors account for model performance $-$ a challenge further complicated by the lack of objective, consistent evaluations. To address these gaps, we first compile a suite of standardized evaluations spanning visual question answering, object localization from language, and targeted challenge sets that probe properties such as hallucination; evaluations that provide calibrated, fine-grained insight into a VLM's capabilities. Second, we rigorously investigate VLMs along key design axes, including pretrained visual representations and quantifying the tradeoffs of using base vs. instruct-tuned language models, amongst others. We couple our analysis with three resource contributions: (1) a unified framework for evaluating VLMs, (2) optimized, flexible code for VLM training, and (3) checkpoints for all models, including a family of VLMs at the 7-13B scale that strictly outperform InstructBLIP and LLaVa v1.5, the state-of-the-art in open-source VLMs.