 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Gemini Robotics Policies in a Veo World Simulator
Dec 11, 2025Generative world models hold significant potential for simulating interactions with visuomotor policies in varied environments. Frontier video models can enable generation of realistic observations and environment interactions in a scalable and general manner. However, the use of video models in robotics has been limited primarily to in-distribution evaluations, i.e., scenarios that are similar to ones used to train the policy or fine-tune the base video model. In this report, we demonstrate that video models can be used for the entire spectrum of policy evaluation use cases in robotics: from assessing nominal performance to out-of-distribution (OOD) generalization, and probing physical and semantic safety. We introduce a generative evaluation system built upon a frontier video foundation model (Veo). The system is optimized to support robot action conditioning and multi-view consistency, while integrating generative image-editing and multi-view completion to synthesize realistic variations of real-world scenes along multiple axes of generalization. We demonstrate that the system preserves the base capabilities of the video model to enable accurate simulation of scenes that have been edited to include novel interaction objects, novel visual backgrounds, and novel distractor objects. This fidelity enables accurately predicting the relative performance of different policies in both nominal and OOD conditions, determining the relative impact of different axes of generalization on policy performance, and performing red teaming of policies to expose behaviors that violate physical or semantic safety constraints. We validate these capabilities through 1600+ real-world evaluations of eight Gemini Robotics policy checkpoints and five tasks for a bimanual manipulator.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Robot Data Curation with Mutual Information Estimators
Feb 12, 2025The performance of imitation learning policies often hinges on the datasets with which they are trained. Consequently, investment in data collection for robotics has grown across both industrial and academic labs. However, despite the marked increase in the quantity of demonstrations collected, little work has sought to assess the quality of said data despite mounting evidence of its importance in other areas such as vision and language. In this work, we take a critical step towards addressing the data quality in robotics. Given a dataset of demonstrations, we aim to estimate the relative quality of individual demonstrations in terms of both state diversity and action predictability. To do so, we estimate the average contribution of a trajectory towards the mutual information between states and actions in the entire dataset, which precisely captures both the entropy of the state distribution and the state-conditioned entropy of actions. Though commonly used mutual information estimators require vast amounts of data often beyond the scale available in robotics, we introduce a novel technique based on k-nearest neighbor estimates of mutual information on top of simple VAE embeddings of states and actions. Empirically, we demonstrate that our approach is able to partition demonstration datasets by quality according to human expert scores across a diverse set of benchmarks spanning simulation and real world environments. Moreover, training policies based on data filtered by our method leads to a 5-10% improvement in RoboMimic and better performance on real ALOHA and Franka setups.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
How to Spend Your Robot Time: Bridging Kickstarting and Offline Reinforcement Learning for Vision-based Robotic Manipulation
May 06, 2022
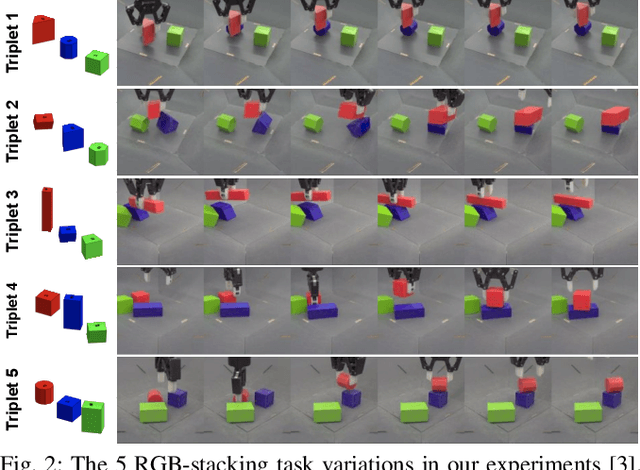


Reinforcement learning (RL) has been shown to be effective at learning control from experience. However, RL typically requires a large amount of online interaction with the environment. This limits its applicability to real-world settings, such as in robotics, where such interaction is expensive. In this work we investigate ways to minimize online interactions in a target task, by reusing a suboptimal policy we might have access to, for example from training on related prior tasks, or in simulation. To this end, we develop two RL algorithms that can speed up training by using not only the action distributions of teacher policies, but also data collected by such policies on the task at hand. We conduct a thorough experimental study of how to use suboptimal teachers on a challenging robotic manipulation benchmark on vision-based stacking with diverse objects. We compare our methods to offline, online, offline-to-online, and kickstarting RL algorithms. By doing so, we find that training on data from both the teacher and student, enables the best performance for limited data budgets. We examine how to best allocate a limited data budget -- on the target task -- between the teacher and the student policy, and report experiments using varying budgets, two teachers with different degrees of suboptimality, and five stacking tasks that require a diverse set of behaviors. Our analysis, both in simulation and in the real world, shows that our approach is the best across data budgets, while standard offline RL from teacher rollouts is surprisingly effective when enough data is given.
Beyond Pick-and-Place: Tackling Robotic Stacking of Diverse Shapes
Nov 03, 2021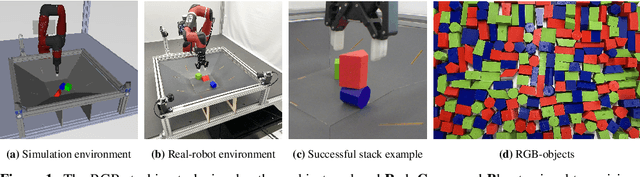
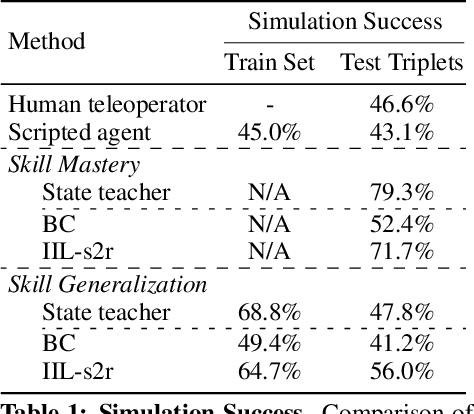
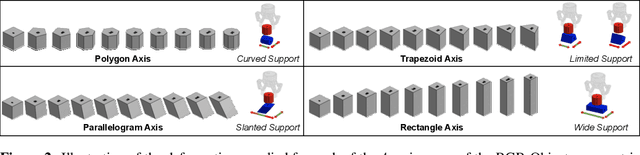
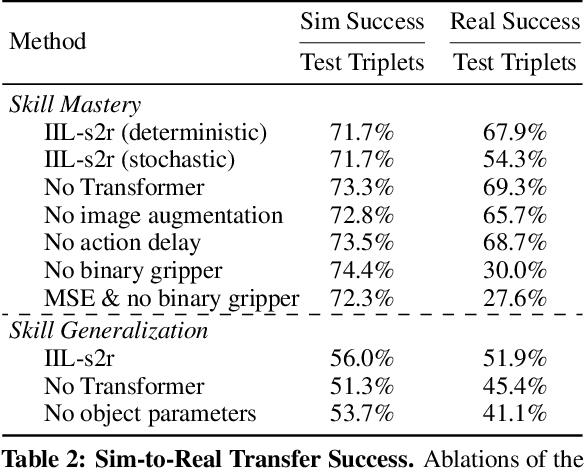
We study the problem of robotic stacking with objects of complex geometry. We propose a challenging and diverse set of such objects that was carefully designed to require strategies beyond a simple "pick-and-place" solution. Our method is a reinforcement learning (RL) approach combined with vision-based interactive policy distillation and simulation-to-reality transfer. Our learned policies can efficiently handle multiple object combinations in the real world and exhibit a large variety of stacking skills. In a large experimental study, we investigate what choices matter for learning such general vision-based agents in simulation, and what affects optimal transfer to the real robot. We then leverage data collected by such policies and improve upon them with offline RL. A video and a blog post of our work are provided as supplementary material.
Fully Autonomous Real-World Reinforcement Learning for Mobile Manipulation
Aug 03, 2021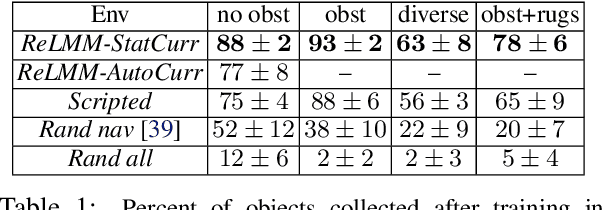
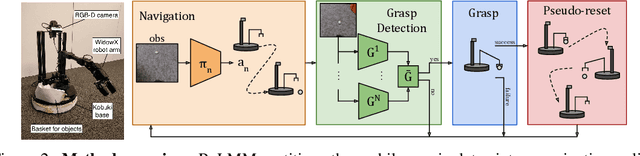
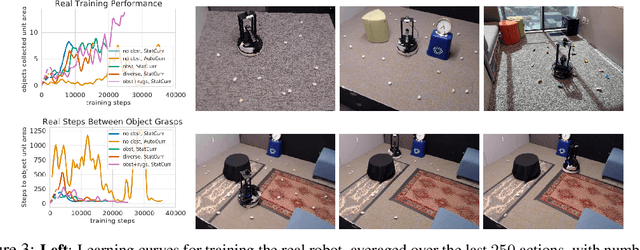
We study how robots can autonomously learn skills that require a combination of navigation and grasping. While reinforcement learning in principle provides for automated robotic skill learning, in practice reinforcement learning in the real world is challenging and often requires extensive instrumentation and supervision. Our aim is to devise a robotic reinforcement learning system for learning navigation and manipulation together, in an autonomous way without human intervention, enabling continual learning under realistic assumptions. Our proposed system, ReLMM, can learn continuously on a real-world platform without any environment instrumentation, without human intervention, and without access to privileged information, such as maps, objects positions, or a global view of the environment. Our method employs a modularized policy with components for manipulation and navigation, where manipulation policy uncertainty drives exploration for the navigation controller, and the manipulation module provides rewards for navigation. We evaluate our method on a room cleanup task, where the robot must navigate to and pick up items scattered on the floor. After a grasp curriculum training phase, ReLMM can learn navigation and grasping together fully automatically, in around 40 hours of autonomous real-world training.
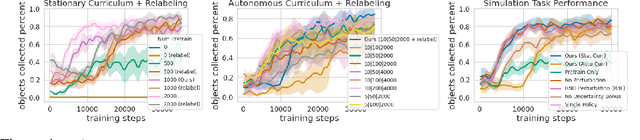
Modularity Improves Out-of-Domain Instruction Following
Oct 24, 2020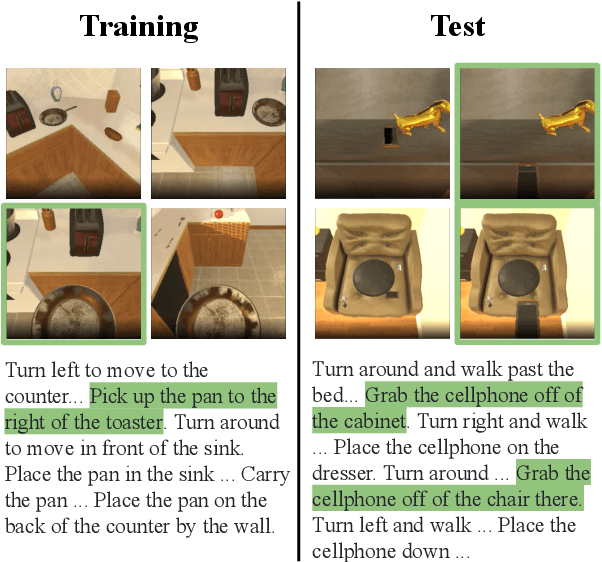
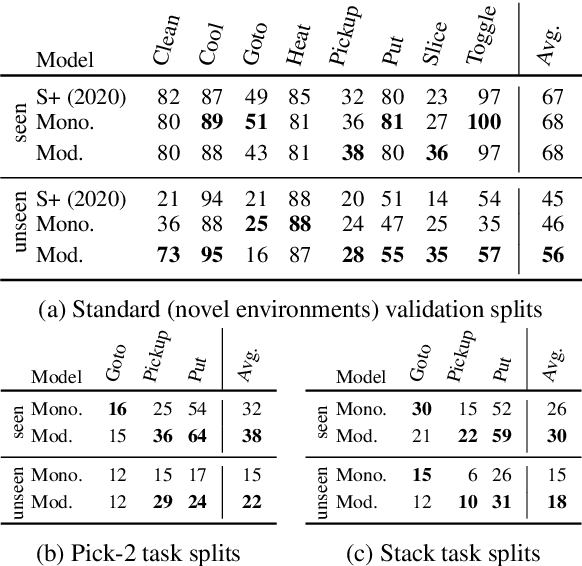
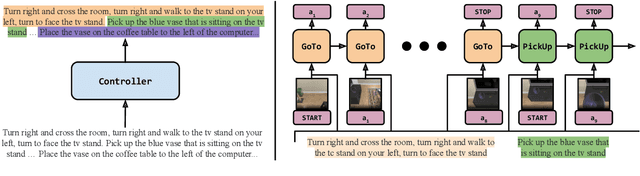
We propose a modular architecture for following natural language instructions that describe sequences of diverse subgoals, such as navigating to landmarks or picking up objects. Standard, non-modular, architectures used in instruction following do not exploit subgoal compositionality and often struggle on out-of-distribution tasks and environments. In our approach, subgoal modules each carry out natural language instructions for a specific subgoal type. A sequence of modules to execute is chosen by learning to segment the instructions and predicting a subgoal type for each segment. When compared to standard sequence-to-sequence approaches on ALFRED, a challenging instruction following benchmark, we find that modularization improves generalization to environments unseen in training and to novel tasks.
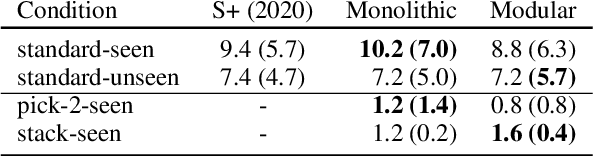
Self-Supervised Goal-Conditioned Pick and Place
Aug 26, 2020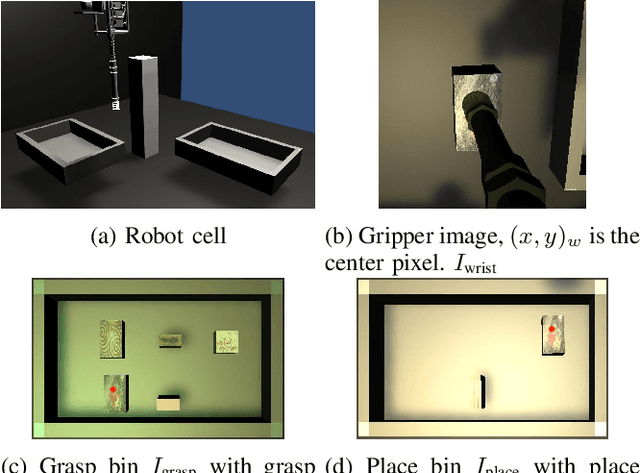
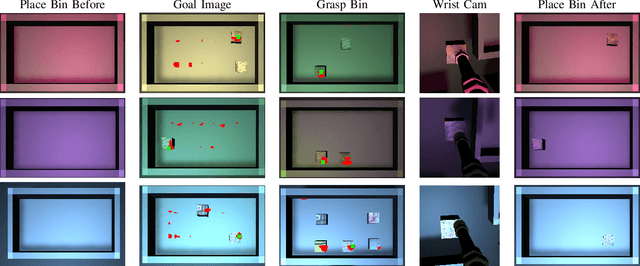
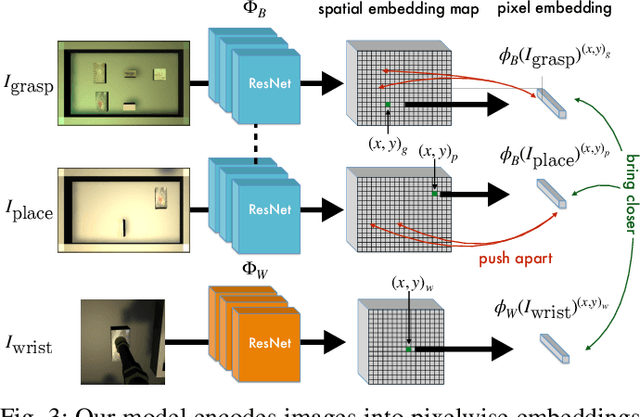
Robots have the capability to collect large amounts of data autonomously by interacting with objects in the world. However, it is often not obvious \emph{how} to learning from autonomously collected data without human-labeled supervision. In this work we learn pixel-wise object representations from unsupervised pick and place data that generalize to new objects. We introduce a novel framework for using these representations in order to predict where to pick and where to place in order to match a goal image. Finally, we demonstrate the utility of our approach in a simulated grasping environment.