 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExoStart: Efficient learning for dexterous manipulation with sensorized exoskeleton demonstrations
Jun 13, 2025



Recent advancements in teleoperation systems have enabled high-quality data collection for robotic manipulators, showing impressive results in learning manipulation at scale. This progress suggests that extending these capabilities to robotic hands could unlock an even broader range of manipulation skills, especially if we could achieve the same level of dexterity that human hands exhibit. However, teleoperating robotic hands is far from a solved problem, as it presents a significant challenge due to the high degrees of freedom of robotic hands and the complex dynamics occurring during contact-rich settings. In this work, we present ExoStart, a general and scalable learning framework that leverages human dexterity to improve robotic hand control. In particular, we obtain high-quality data by collecting direct demonstrations without a robot in the loop using a sensorized low-cost wearable exoskeleton, capturing the rich behaviors that humans can demonstrate with their own hands. We also propose a simulation-based dynamics filter that generates dynamically feasible trajectories from the collected demonstrations and use the generated trajectories to bootstrap an auto-curriculum reinforcement learning method that relies only on simple sparse rewards. The ExoStart pipeline is generalizable and yields robust policies that transfer zero-shot to the real robot. Our results demonstrate that ExoStart can generate dexterous real-world hand skills, achieving a success rate above 50% on a wide range of complex tasks such as opening an AirPods case or inserting and turning a key in a lock. More details and videos can be found in https://sites.google.com/view/exostart.
Gemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Preference Optimization as Probabilistic Inference
Oct 05, 2024
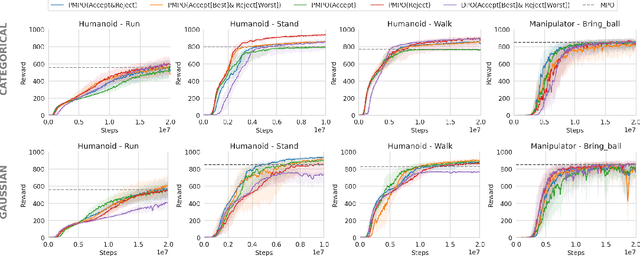
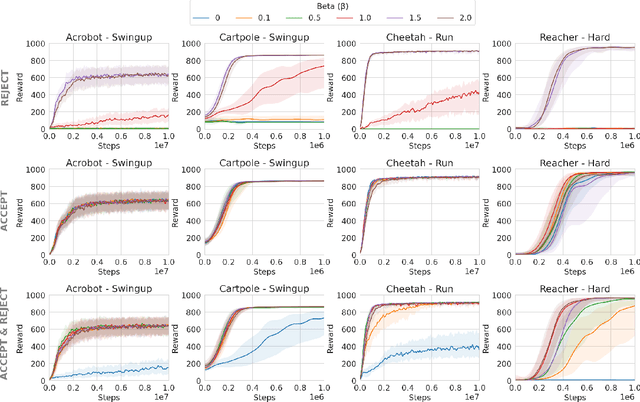
Existing preference optimization methods are mainly designed for directly learning from human feedback with the assumption that paired examples (preferred vs. dis-preferred) are available. In contrast, we propose a method that can leverage unpaired preferred or dis-preferred examples, and works even when only one type of feedback (positive or negative) is available. This flexibility allows us to apply it in scenarios with varying forms of feedback and models, including training generative language models based on human feedback as well as training policies for sequential decision-making problems, where learned (value) functions are available. Our approach builds upon the probabilistic framework introduced in (Dayan and Hinton, 1997), which proposes to use expectation-maximization (EM) to directly optimize the probability of preferred outcomes (as opposed to classic expected reward maximization). To obtain a practical algorithm, we identify and address a key limitation in current EM-based methods: when applied to preference optimization, they solely maximize the likelihood of preferred examples, while neglecting dis-preferred samples. We show how one can extend EM algorithms to explicitly incorporate dis-preferred outcomes, leading to a novel, theoretically grounded, preference optimization algorithm that offers an intuitive and versatile way to learn from both positive and negative feedback.
Game On: Towards Language Models as RL Experimenters
Sep 05, 2024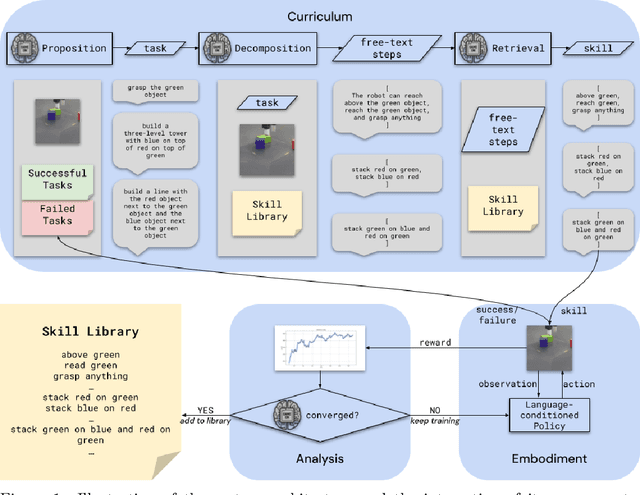

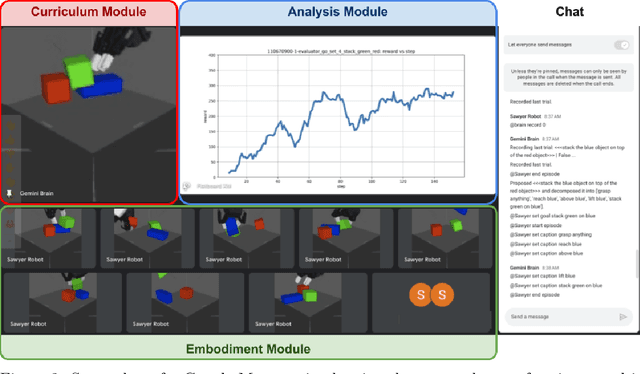
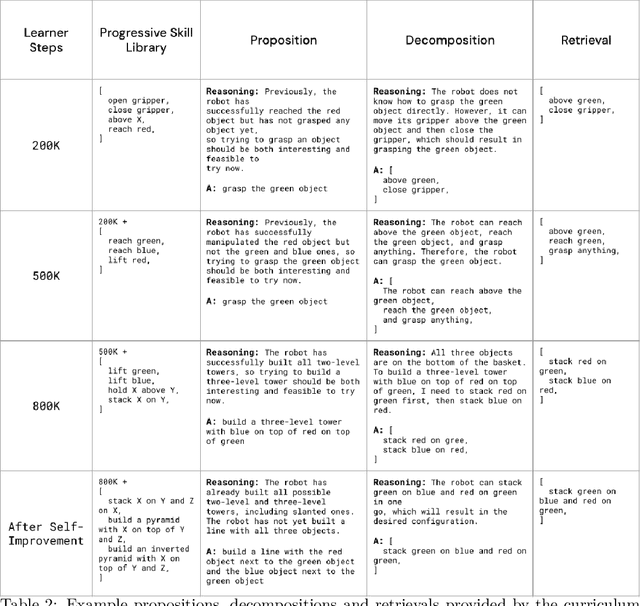
We propose an agent architecture that automates parts of the common reinforcement learning experiment workflow, to enable automated mastery of control domains for embodied agents. To do so, it leverages a VLM to perform some of the capabilities normally required of a human experimenter, including the monitoring and analysis of experiment progress, the proposition of new tasks based on past successes and failures of the agent, decomposing tasks into a sequence of subtasks (skills), and retrieval of the skill to execute - enabling our system to build automated curricula for learning. We believe this is one of the first proposals for a system that leverages a VLM throughout the full experiment cycle of reinforcement learning. We provide a first prototype of this system, and examine the feasibility of current models and techniques for the desired level of automation. For this, we use a standard Gemini model, without additional fine-tuning, to provide a curriculum of skills to a language-conditioned Actor-Critic algorithm, in order to steer data collection so as to aid learning new skills. Data collected in this way is shown to be useful for learning and iteratively improving control policies in a robotics domain. Additional examination of the ability of the system to build a growing library of skills, and to judge the progress of the training of those skills, also shows promising results, suggesting that the proposed architecture provides a potential recipe for fully automated mastery of tasks and domains for embodied agents.
Real-World Fluid Directed Rigid Body Control via Deep Reinforcement Learning
Feb 08, 2024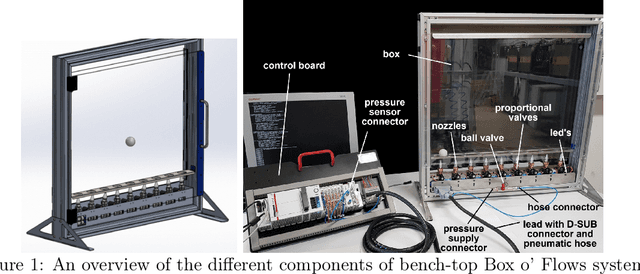

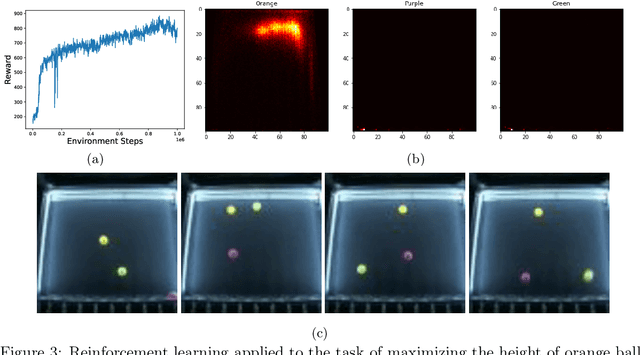
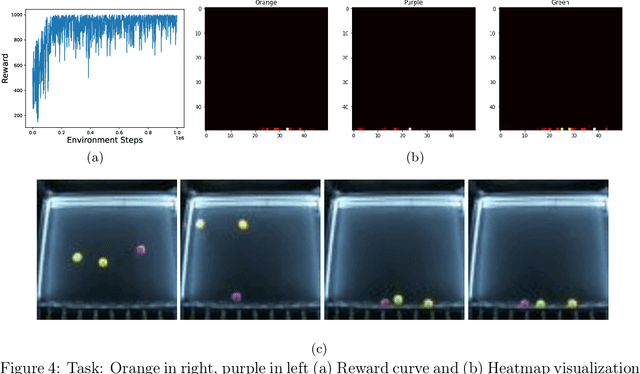
Recent advances in real-world applications of reinforcement learning (RL) have relied on the ability to accurately simulate systems at scale. However, domains such as fluid dynamical systems exhibit complex dynamic phenomena that are hard to simulate at high integration rates, limiting the direct application of modern deep RL algorithms to often expensive or safety critical hardware. In this work, we introduce "Box o Flows", a novel benchtop experimental control system for systematically evaluating RL algorithms in dynamic real-world scenarios. We describe the key components of the Box o Flows, and through a series of experiments demonstrate how state-of-the-art model-free RL algorithms can synthesize a variety of complex behaviors via simple reward specifications. Furthermore, we explore the role of offline RL in data-efficient hypothesis testing by reusing past experiences. We believe that the insights gained from this preliminary study and the availability of systems like the Box o Flows support the way forward for developing systematic RL algorithms that can be generally applied to complex, dynamical systems. Supplementary material and videos of experiments are available at https://sites.google.com/view/box-o-flows/home.
Offline Actor-Critic Reinforcement Learning Scales to Large Models
Feb 08, 2024



We show that offline actor-critic reinforcement learning can scale to large models - such as transformers - and follows similar scaling laws as supervised learning. We find that offline actor-critic algorithms can outperform strong, supervised, behavioral cloning baselines for multi-task training on a large dataset containing both sub-optimal and expert behavior on 132 continuous control tasks. We introduce a Perceiver-based actor-critic model and elucidate the key model features needed to make offline RL work with self- and cross-attention modules. Overall, we find that: i) simple offline actor critic algorithms are a natural choice for gradually moving away from the currently predominant paradigm of behavioral cloning, and ii) via offline RL it is possible to learn multi-task policies that master many domains simultaneously, including real robotics tasks, from sub-optimal demonstrations or self-generated data.
Mastering Stacking of Diverse Shapes with Large-Scale Iterative Reinforcement Learning on Real Robots
Dec 18, 2023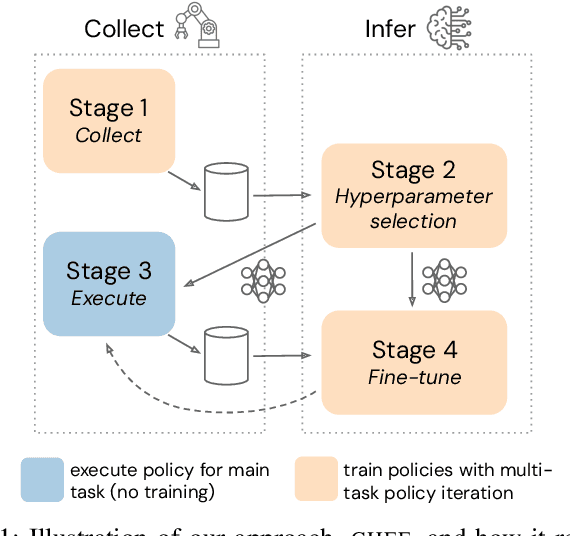
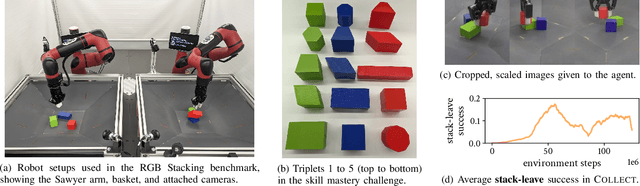

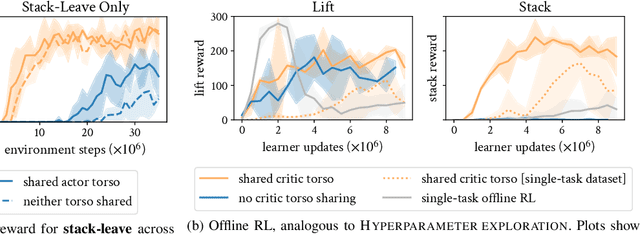
Reinforcement learning solely from an agent's self-generated data is often believed to be infeasible for learning on real robots, due to the amount of data needed. However, if done right, agents learning from real data can be surprisingly efficient through re-using previously collected sub-optimal data. In this paper we demonstrate how the increased understanding of off-policy learning methods and their embedding in an iterative online/offline scheme (``collect and infer'') can drastically improve data-efficiency by using all the collected experience, which empowers learning from real robot experience only. Moreover, the resulting policy improves significantly over the state of the art on a recently proposed real robot manipulation benchmark. Our approach learns end-to-end, directly from pixels, and does not rely on additional human domain knowledge such as a simulator or demonstrations.
Replay across Experiments: A Natural Extension of Off-Policy RL
Nov 28, 2023



Replaying data is a principal mechanism underlying the stability and data efficiency of off-policy reinforcement learning (RL). We present an effective yet simple framework to extend the use of replays across multiple experiments, minimally adapting the RL workflow for sizeable improvements in controller performance and research iteration times. At its core, Replay Across Experiments (RaE) involves reusing experience from previous experiments to improve exploration and bootstrap learning while reducing required changes to a minimum in comparison to prior work. We empirically show benefits across a number of RL algorithms and challenging control domains spanning both locomotion and manipulation, including hard exploration tasks from egocentric vision. Through comprehensive ablations, we demonstrate robustness to the quality and amount of data available and various hyperparameter choices. Finally, we discuss how our approach can be applied more broadly across research life cycles and can increase resilience by reloading data across random seeds or hyperparameter variations.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
Dec 03, 2022


The ability to effectively reuse prior knowledge is a key requirement when building general and flexible Reinforcement Learning (RL) agents. Skill reuse is one of the most common approaches, but current methods have considerable limitations.For example, fine-tuning an existing policy frequently fails, as the policy can degrade rapidly early in training. In a similar vein, distillation of expert behavior can lead to poor results when given sub-optimal experts. We compare several common approaches for skill transfer on multiple domains including changes in task and system dynamics. We identify how existing methods can fail and introduce an alternative approach to mitigate these problems. Our approach learns to sequence existing temporally-extended skills for exploration but learns the final policy directly from the raw experience. This conceptual split enables rapid adaptation and thus efficient data collection but without constraining the final solution.It significantly outperforms many classical methods across a suite of evaluation tasks and we use a broad set of ablations to highlight the importance of differentc omponents of our method.