 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGame On: Towards Language Models as RL Experimenters
Paper and Code
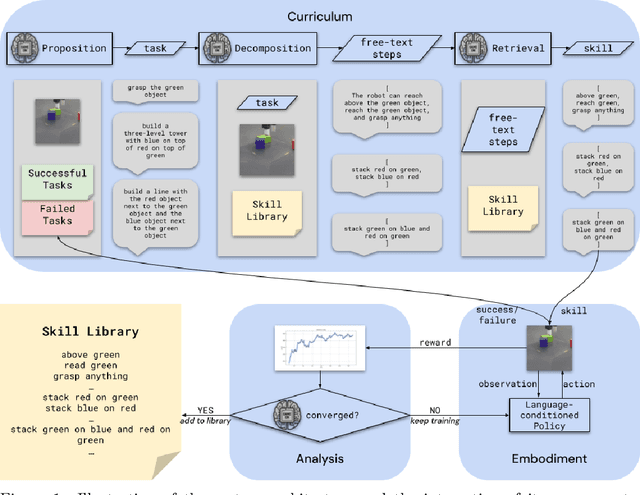

We propose an agent architecture that automates parts of the common reinforcement learning experiment workflow, to enable automated mastery of control domains for embodied agents. To do so, it leverages a VLM to perform some of the capabilities normally required of a human experimenter, including the monitoring and analysis of experiment progress, the proposition of new tasks based on past successes and failures of the agent, decomposing tasks into a sequence of subtasks (skills), and retrieval of the skill to execute - enabling our system to build automated curricula for learning. We believe this is one of the first proposals for a system that leverages a VLM throughout the full experiment cycle of reinforcement learning. We provide a first prototype of this system, and examine the feasibility of current models and techniques for the desired level of automation. For this, we use a standard Gemini model, without additional fine-tuning, to provide a curriculum of skills to a language-conditioned Actor-Critic algorithm, in order to steer data collection so as to aid learning new skills. Data collected in this way is shown to be useful for learning and iteratively improving control policies in a robotics domain. Additional examination of the ability of the system to build a growing library of skills, and to judge the progress of the training of those skills, also shows promising results, suggesting that the proposed architecture provides a potential recipe for fully automated mastery of tasks and domains for embodied agents.