 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNFQ2.0: The CartPole Benchmark Revisited
Nov 16, 2025



This article revisits the 20-year-old neural fitted Q-iteration (NFQ) algorithm on its classical CartPole benchmark. NFQ was a pioneering approach towards modern Deep Reinforcement Learning (Deep RL) in applying multi-layer neural networks to reinforcement learning for real-world control problems. We explore the algorithm's conceptual simplicity and its transition from online to batch learning, which contributed to its stability. Despite its initial success, NFQ required extensive tuning and was not easily reproducible on real-world control problems. We propose a modernized variant NFQ2.0 and apply it to the CartPole task, concentrating on a real-world system build from standard industrial components, to investigate and improve the learning process's repeatability and robustness. Through ablation studies, we highlight key design decisions and hyperparameters that enhance performance and stability of NFQ2.0 over the original variant. Finally, we demonstrate how our findings can assist practitioners in reproducing and improving results and applying deep reinforcement learning more effectively in industrial contexts.
Improving cosmological reach of a gravitational wave observatory using Deep Loop Shaping
Sep 17, 2025Improved low-frequency sensitivity of gravitational wave observatories would unlock study of intermediate-mass black hole mergers, binary black hole eccentricity, and provide early warnings for multi-messenger observations of binary neutron star mergers. Today's mirror stabilization control injects harmful noise, constituting a major obstacle to sensitivity improvements. We eliminated this noise through Deep Loop Shaping, a reinforcement learning method using frequency domain rewards. We proved our methodology on the LIGO Livingston Observatory (LLO). Our controller reduced control noise in the 10--30Hz band by over 30x, and up to 100x in sub-bands surpassing the design goal motivated by the quantum limit. These results highlight the potential of Deep Loop Shaping to improve current and future GW observatories, and more broadly instrumentation and control systems.
Value from Observations: Towards Large-Scale Imitation Learning via Self-Improvement
Jul 09, 2025Imitation Learning from Observation (IfO) offers a powerful way to learn behaviors at large-scale: Unlike behavior cloning or offline reinforcement learning, IfO can leverage action-free demonstrations and thus circumvents the need for costly action-labeled demonstrations or reward functions. However, current IfO research focuses on idealized scenarios with mostly bimodal-quality data distributions, restricting the meaningfulness of the results. In contrast, this paper investigates more nuanced distributions and introduces a method to learn from such data, moving closer to a paradigm in which imitation learning can be performed iteratively via self-improvement. Our method adapts RL-based imitation learning to action-free demonstrations, using a value function to transfer information between expert and non-expert data. Through comprehensive evaluation, we delineate the relation between different data distributions and the applicability of algorithms and highlight the limitations of established methods. Our findings provide valuable insights for developing more robust and practical IfO techniques on a path to scalable behaviour learning.
Preference Optimization as Probabilistic Inference
Oct 05, 2024
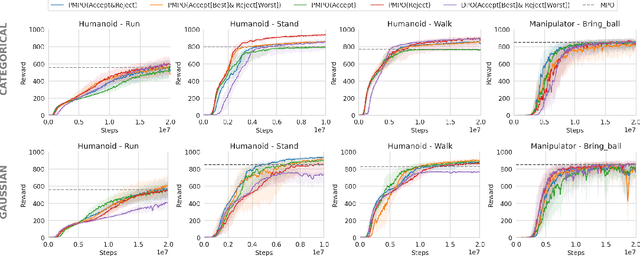
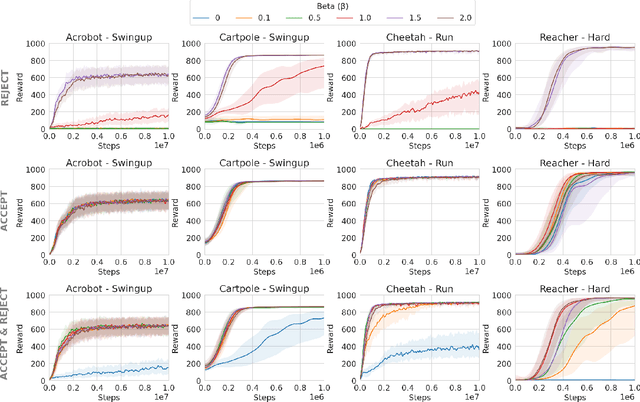
Existing preference optimization methods are mainly designed for directly learning from human feedback with the assumption that paired examples (preferred vs. dis-preferred) are available. In contrast, we propose a method that can leverage unpaired preferred or dis-preferred examples, and works even when only one type of feedback (positive or negative) is available. This flexibility allows us to apply it in scenarios with varying forms of feedback and models, including training generative language models based on human feedback as well as training policies for sequential decision-making problems, where learned (value) functions are available. Our approach builds upon the probabilistic framework introduced in (Dayan and Hinton, 1997), which proposes to use expectation-maximization (EM) to directly optimize the probability of preferred outcomes (as opposed to classic expected reward maximization). To obtain a practical algorithm, we identify and address a key limitation in current EM-based methods: when applied to preference optimization, they solely maximize the likelihood of preferred examples, while neglecting dis-preferred samples. We show how one can extend EM algorithms to explicitly incorporate dis-preferred outcomes, leading to a novel, theoretically grounded, preference optimization algorithm that offers an intuitive and versatile way to learn from both positive and negative feedback.
DemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Sep 10, 2024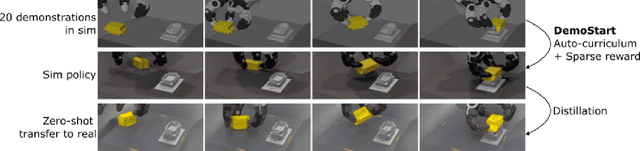
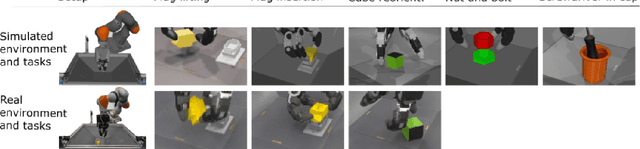
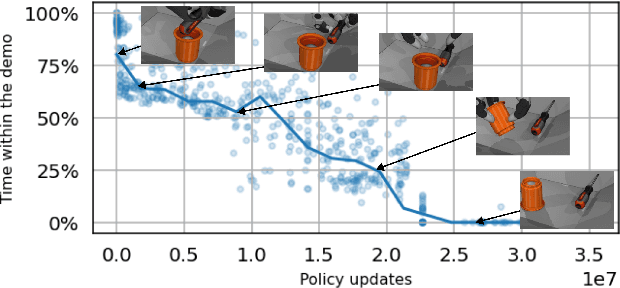
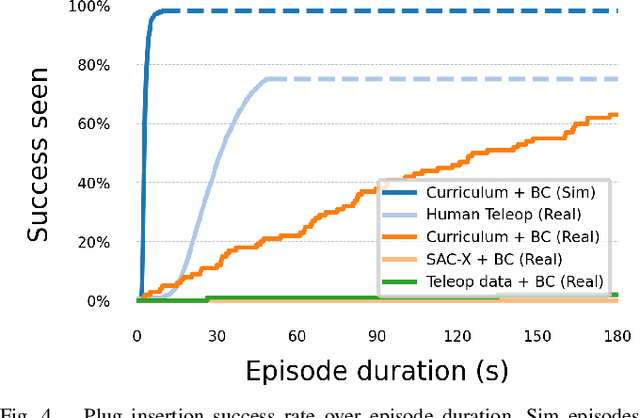
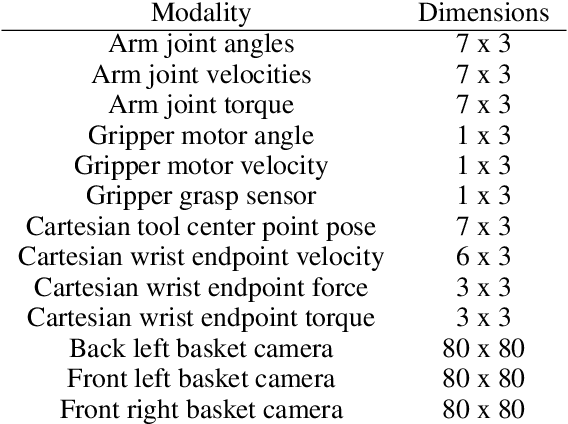
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.
Game On: Towards Language Models as RL Experimenters
Sep 05, 2024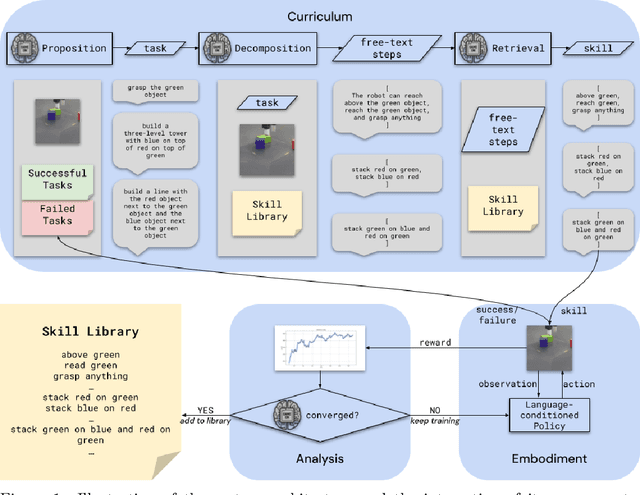

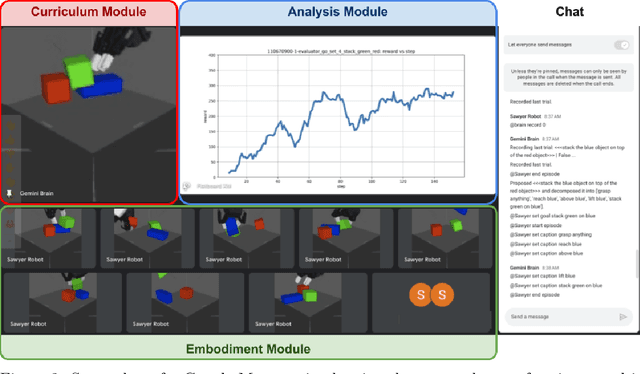
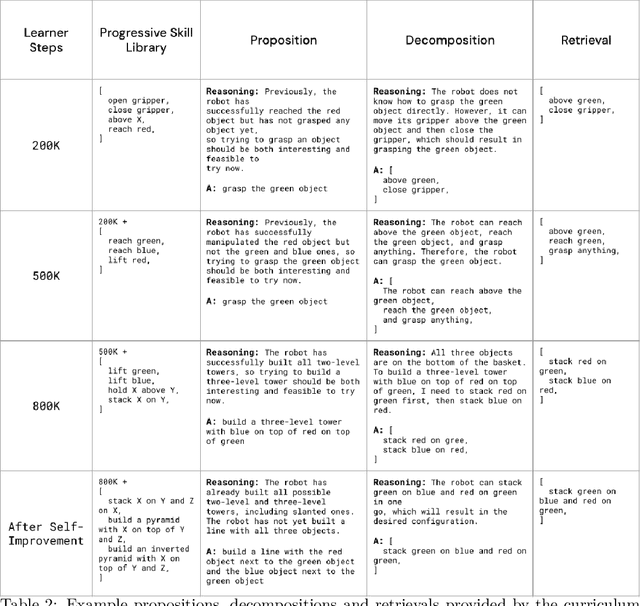
We propose an agent architecture that automates parts of the common reinforcement learning experiment workflow, to enable automated mastery of control domains for embodied agents. To do so, it leverages a VLM to perform some of the capabilities normally required of a human experimenter, including the monitoring and analysis of experiment progress, the proposition of new tasks based on past successes and failures of the agent, decomposing tasks into a sequence of subtasks (skills), and retrieval of the skill to execute - enabling our system to build automated curricula for learning. We believe this is one of the first proposals for a system that leverages a VLM throughout the full experiment cycle of reinforcement learning. We provide a first prototype of this system, and examine the feasibility of current models and techniques for the desired level of automation. For this, we use a standard Gemini model, without additional fine-tuning, to provide a curriculum of skills to a language-conditioned Actor-Critic algorithm, in order to steer data collection so as to aid learning new skills. Data collected in this way is shown to be useful for learning and iteratively improving control policies in a robotics domain. Additional examination of the ability of the system to build a growing library of skills, and to judge the progress of the training of those skills, also shows promising results, suggesting that the proposed architecture provides a potential recipe for fully automated mastery of tasks and domains for embodied agents.
Imitating Language via Scalable Inverse Reinforcement Learning
Sep 02, 2024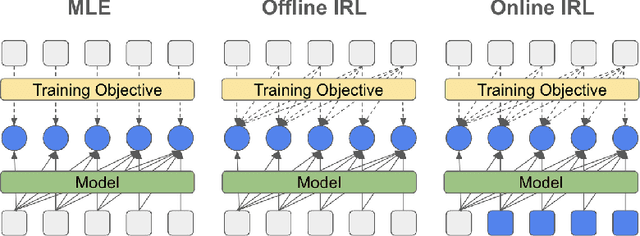
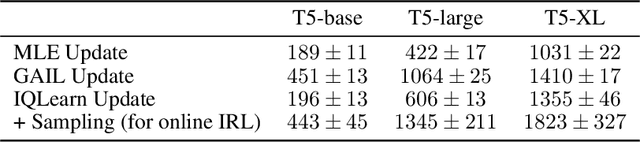
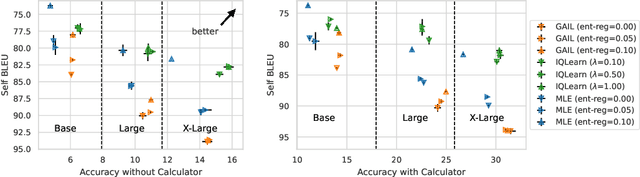

The majority of language model training builds on imitation learning. It covers pretraining, supervised fine-tuning, and affects the starting conditions for reinforcement learning from human feedback (RLHF). The simplicity and scalability of maximum likelihood estimation (MLE) for next token prediction led to its role as predominant paradigm. However, the broader field of imitation learning can more effectively utilize the sequential structure underlying autoregressive generation. We focus on investigating the inverse reinforcement learning (IRL) perspective to imitation, extracting rewards and directly optimizing sequences instead of individual token likelihoods and evaluate its benefits for fine-tuning large language models. We provide a new angle, reformulating inverse soft-Q-learning as a temporal difference regularized extension of MLE. This creates a principled connection between MLE and IRL and allows trading off added complexity with increased performance and diversity of generations in the supervised fine-tuning (SFT) setting. We find clear advantages for IRL-based imitation, in particular for retaining diversity while maximizing task performance, rendering IRL a strong alternative on fixed SFT datasets even without online data generation. Our analysis of IRL-extracted reward functions further indicates benefits for more robust reward functions via tighter integration of supervised and preference-based LLM post-training.
Learning Robot Soccer from Egocentric Vision with Deep Reinforcement Learning
May 03, 2024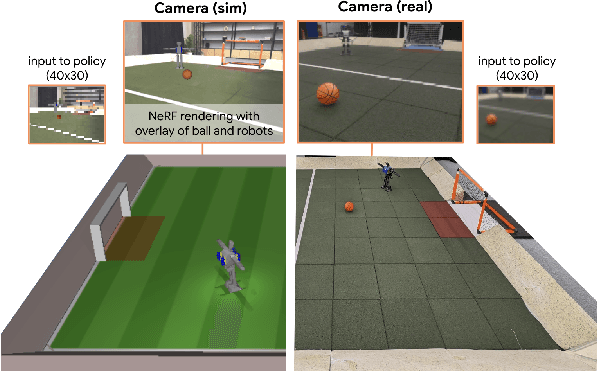
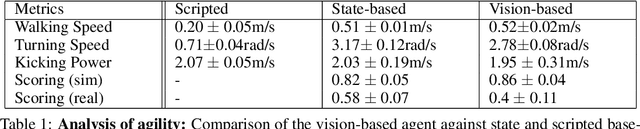
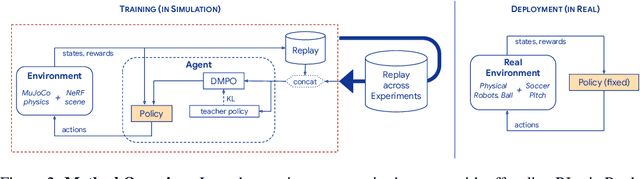
We apply multi-agent deep reinforcement learning (RL) to train end-to-end robot soccer policies with fully onboard computation and sensing via egocentric RGB vision. This setting reflects many challenges of real-world robotics, including active perception, agile full-body control, and long-horizon planning in a dynamic, partially-observable, multi-agent domain. We rely on large-scale, simulation-based data generation to obtain complex behaviors from egocentric vision which can be successfully transferred to physical robots using low-cost sensors. To achieve adequate visual realism, our simulation combines rigid-body physics with learned, realistic rendering via multiple Neural Radiance Fields (NeRFs). We combine teacher-based multi-agent RL and cross-experiment data reuse to enable the discovery of sophisticated soccer strategies. We analyze active-perception behaviors including object tracking and ball seeking that emerge when simply optimizing perception-agnostic soccer play. The agents display equivalent levels of performance and agility as policies with access to privileged, ground-truth state. To our knowledge, this paper constitutes a first demonstration of end-to-end training for multi-agent robot soccer, mapping raw pixel observations to joint-level actions, that can be deployed in the real world. Videos of the game-play and analyses can be seen on our website https://sites.google.com/view/vision-soccer .
Offline Actor-Critic Reinforcement Learning Scales to Large Models
Feb 08, 2024



We show that offline actor-critic reinforcement learning can scale to large models - such as transformers - and follows similar scaling laws as supervised learning. We find that offline actor-critic algorithms can outperform strong, supervised, behavioral cloning baselines for multi-task training on a large dataset containing both sub-optimal and expert behavior on 132 continuous control tasks. We introduce a Perceiver-based actor-critic model and elucidate the key model features needed to make offline RL work with self- and cross-attention modules. Overall, we find that: i) simple offline actor critic algorithms are a natural choice for gradually moving away from the currently predominant paradigm of behavioral cloning, and ii) via offline RL it is possible to learn multi-task policies that master many domains simultaneously, including real robotics tasks, from sub-optimal demonstrations or self-generated data.
Real-World Fluid Directed Rigid Body Control via Deep Reinforcement Learning
Feb 08, 2024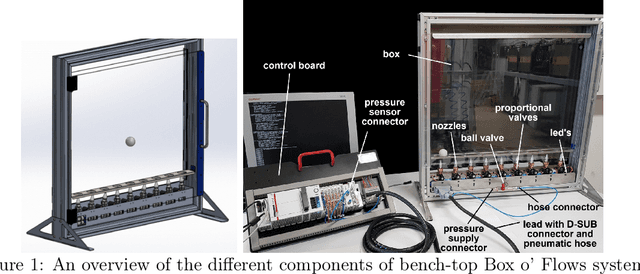

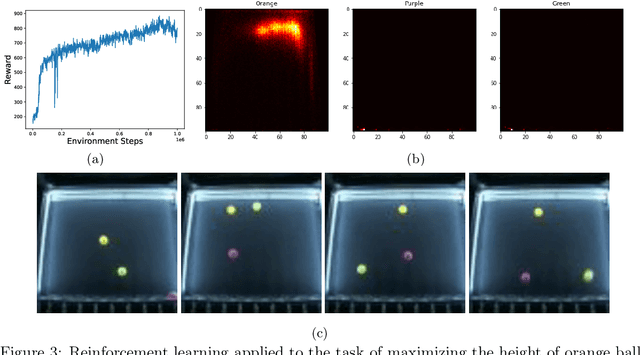
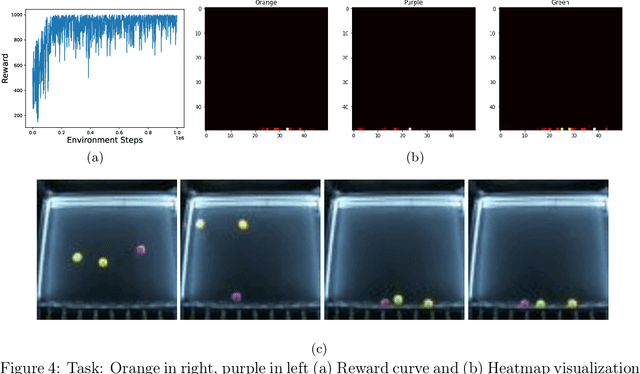
Recent advances in real-world applications of reinforcement learning (RL) have relied on the ability to accurately simulate systems at scale. However, domains such as fluid dynamical systems exhibit complex dynamic phenomena that are hard to simulate at high integration rates, limiting the direct application of modern deep RL algorithms to often expensive or safety critical hardware. In this work, we introduce "Box o Flows", a novel benchtop experimental control system for systematically evaluating RL algorithms in dynamic real-world scenarios. We describe the key components of the Box o Flows, and through a series of experiments demonstrate how state-of-the-art model-free RL algorithms can synthesize a variety of complex behaviors via simple reward specifications. Furthermore, we explore the role of offline RL in data-efficient hypothesis testing by reusing past experiences. We believe that the insights gained from this preliminary study and the availability of systems like the Box o Flows support the way forward for developing systematic RL algorithms that can be generally applied to complex, dynamical systems. Supplementary material and videos of experiments are available at https://sites.google.com/view/box-o-flows/home.