 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Sep 10, 2024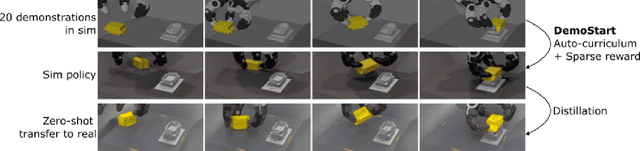
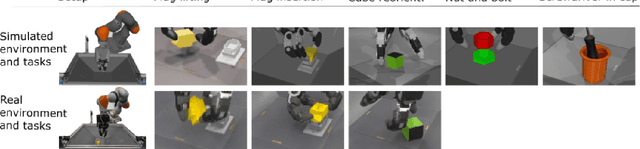
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
Discovering Attention-Based Genetic Algorithms via Meta-Black-Box Optimization
Apr 08, 2023



Genetic algorithms constitute a family of black-box optimization algorithms, which take inspiration from the principles of biological evolution. While they provide a general-purpose tool for optimization, their particular instantiations can be heuristic and motivated by loose biological intuition. In this work we explore a fundamentally different approach: Given a sufficiently flexible parametrization of the genetic operators, we discover entirely new genetic algorithms in a data-driven fashion. More specifically, we parametrize selection and mutation rate adaptation as cross- and self-attention modules and use Meta-Black-Box-Optimization to evolve their parameters on a set of diverse optimization tasks. The resulting Learned Genetic Algorithm outperforms state-of-the-art adaptive baseline genetic algorithms and generalizes far beyond its meta-training settings. The learned algorithm can be applied to previously unseen optimization problems, search dimensions & evaluation budgets. We conduct extensive analysis of the discovered operators and provide ablation experiments, which highlight the benefits of flexible module parametrization and the ability to transfer (`plug-in') the learned operators to conventional genetic algorithms.
Rapid training of deep neural networks without skip connections or normalization layers using Deep Kernel Shaping
Oct 05, 2021Using an extended and formalized version of the Q/C map analysis of Poole et al. (2016), along with Neural Tangent Kernel theory, we identify the main pathologies present in deep networks that prevent them from training fast and generalizing to unseen data, and show how these can be avoided by carefully controlling the "shape" of the network's initialization-time kernel function. We then develop a method called Deep Kernel Shaping (DKS), which accomplishes this using a combination of precise parameter initialization, activation function transformations, and small architectural tweaks, all of which preserve the model class. In our experiments we show that DKS enables SGD training of residual networks without normalization layers on Imagenet and CIFAR-10 classification tasks at speeds comparable to standard ResNetV2 and Wide-ResNet models, with only a small decrease in generalization performance. And when using K-FAC as the optimizer, we achieve similar results for networks without skip connections. Our results apply for a large variety of activation functions, including those which traditionally perform very badly, such as the logistic sigmoid. In addition to DKS, we contribute a detailed analysis of skip connections, normalization layers, special activation functions like RELU and SELU, and various initialization schemes, explaining their effectiveness as alternative (and ultimately incomplete) ways of "shaping" the network's initialization-time kernel.
Faster Improvement Rate Population Based Training
Sep 28, 2021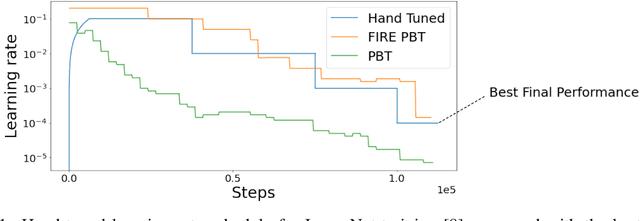
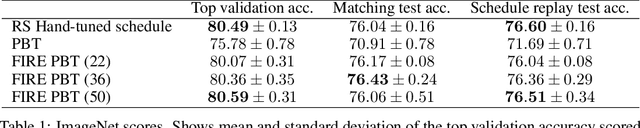
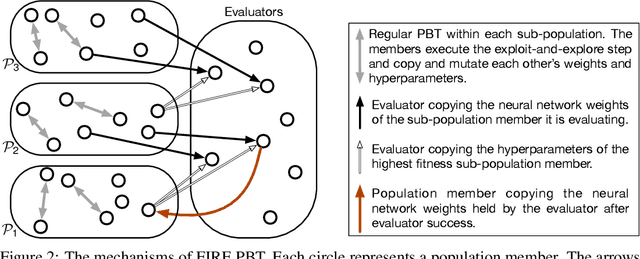
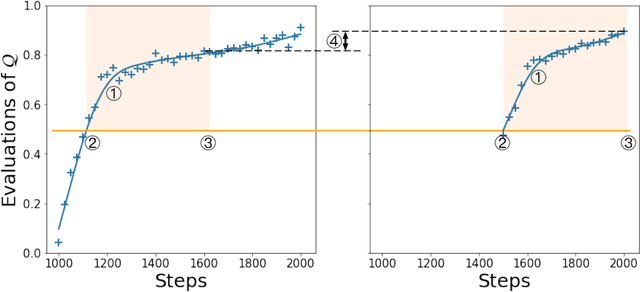
The successful training of neural networks typically involves careful and time consuming hyperparameter tuning. Population Based Training (PBT) has recently been proposed to automate this process. PBT trains a population of neural networks concurrently, frequently mutating their hyperparameters throughout their training. However, the decision mechanisms of PBT are greedy and favour short-term improvements which can, in some cases, lead to poor long-term performance. This paper presents Faster Improvement Rate PBT (FIRE PBT) which addresses this problem. Our method is guided by an assumption: given two neural networks with similar performance and training with similar hyperparameters, the network showing the faster rate of improvement will lead to a better final performance. Using this, we derive a novel fitness metric and use it to make some of the population members focus on long-term performance. Our experiments show that FIRE PBT is able to outperform PBT on the ImageNet benchmark and match the performance of networks that were trained with a hand-tuned learning rate schedule. We apply FIRE PBT to reinforcement learning tasks and show that it leads to faster learning and higher final performance than both PBT and random hyperparameter search.
Open-Ended Learning Leads to Generally Capable Agents
Jul 31, 2021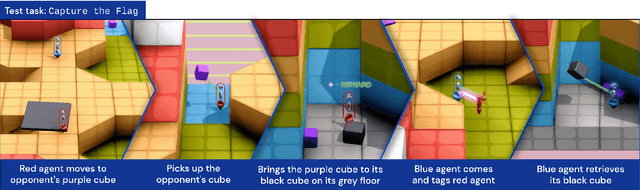
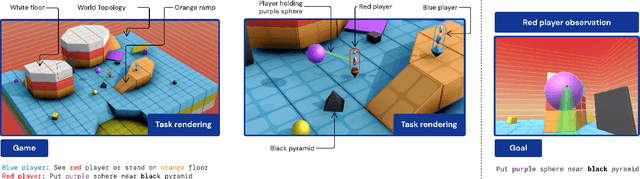
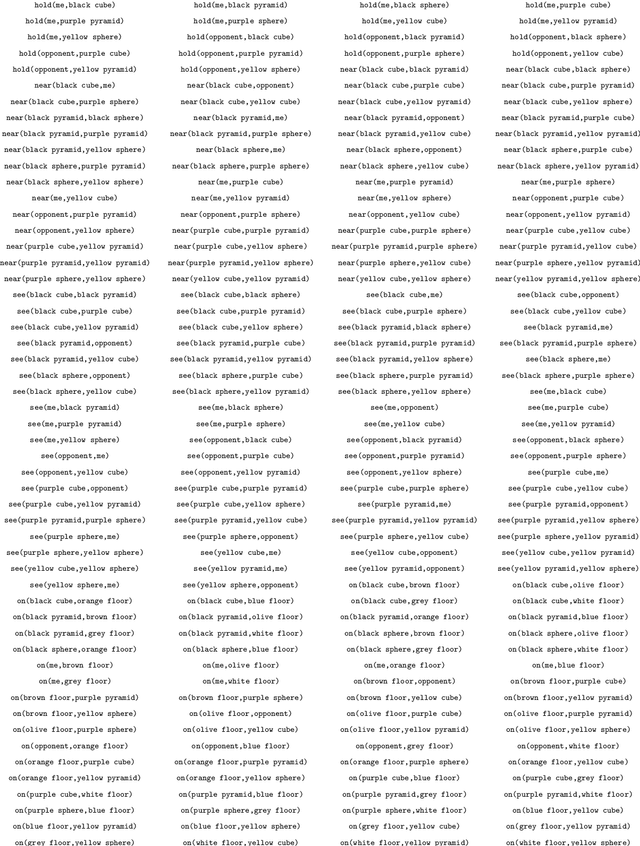
In this work we create agents that can perform well beyond a single, individual task, that exhibit much wider generalisation of behaviour to a massive, rich space of challenges. We define a universe of tasks within an environment domain and demonstrate the ability to train agents that are generally capable across this vast space and beyond. The environment is natively multi-agent, spanning the continuum of competitive, cooperative, and independent games, which are situated within procedurally generated physical 3D worlds. The resulting space is exceptionally diverse in terms of the challenges posed to agents, and as such, even measuring the learning progress of an agent is an open research problem. We propose an iterative notion of improvement between successive generations of agents, rather than seeking to maximise a singular objective, allowing us to quantify progress despite tasks being incomparable in terms of achievable rewards. We show that through constructing an open-ended learning process, which dynamically changes the training task distributions and training objectives such that the agent never stops learning, we achieve consistent learning of new behaviours. The resulting agent is able to score reward in every one of our humanly solvable evaluation levels, with behaviour generalising to many held-out points in the universe of tasks. Examples of this zero-shot generalisation include good performance on Hide and Seek, Capture the Flag, and Tag. Through analysis and hand-authored probe tasks we characterise the behaviour of our agent, and find interesting emergent heuristic behaviours such as trial-and-error experimentation, simple tool use, option switching, and cooperation. Finally, we demonstrate that the general capabilities of this agent could unlock larger scale transfer of behaviour through cheap finetuning.
Perception-Prediction-Reaction Agents for Deep Reinforcement Learning
Jun 26, 2020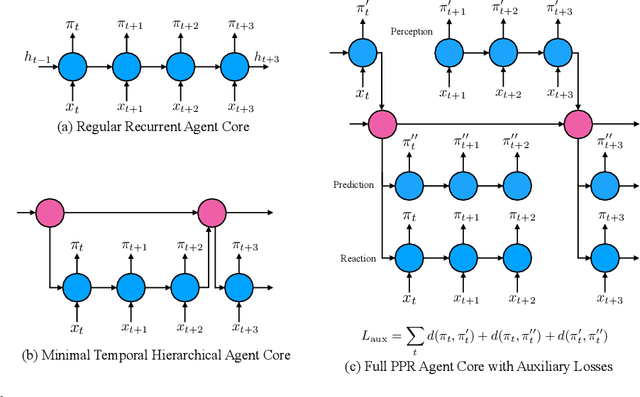
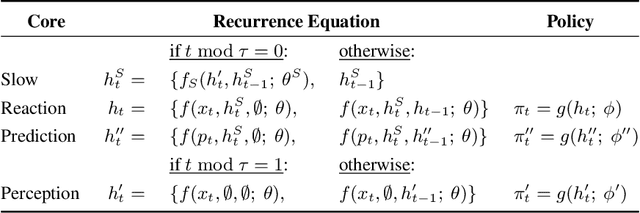
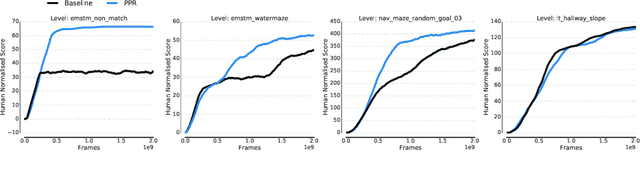
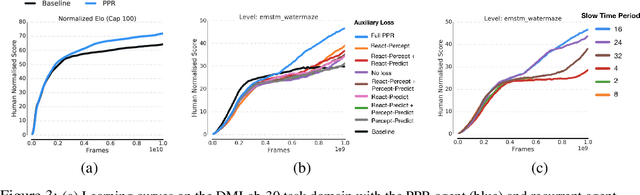
We introduce a new recurrent agent architecture and associated auxiliary losses which improve reinforcement learning in partially observable tasks requiring long-term memory. We employ a temporal hierarchy, using a slow-ticking recurrent core to allow information to flow more easily over long time spans, and three fast-ticking recurrent cores with connections designed to create an information asymmetry. The \emph{reaction} core incorporates new observations with input from the slow core to produce the agent's policy; the \emph{perception} core accesses only short-term observations and informs the slow core; lastly, the \emph{prediction} core accesses only long-term memory. An auxiliary loss regularizes policies drawn from all three cores against each other, enacting the prior that the policy should be expressible from either recent or long-term memory. We present the resulting \emph{Perception-Prediction-Reaction} (PPR) agent and demonstrate its improved performance over a strong LSTM-agent baseline in DMLab-30, particularly in tasks requiring long-term memory. We further show significant improvements in Capture the Flag, an environment requiring agents to acquire a complicated mixture of skills over long time scales. In a series of ablation experiments, we probe the importance of each component of the PPR agent, establishing that the entire, novel combination is necessary for this intriguing result.
A Generalized Framework for Population Based Training
Feb 05, 2019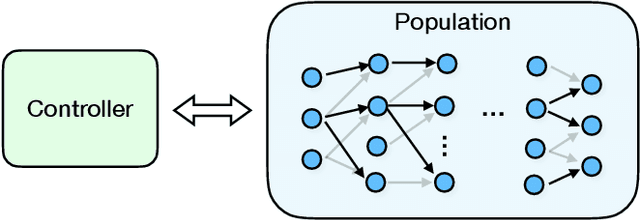
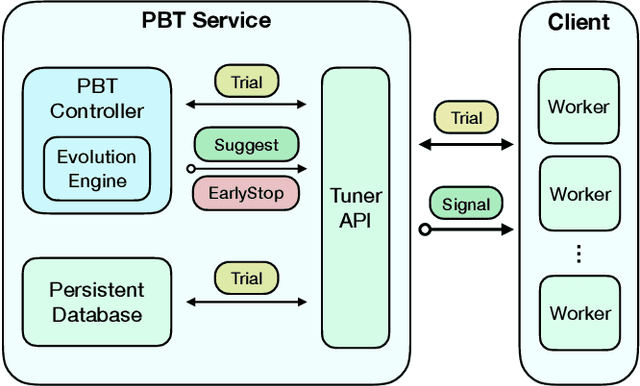


Population Based Training (PBT) is a recent approach that jointly optimizes neural network weights and hyperparameters which periodically copies weights of the best performers and mutates hyperparameters during training. Previous PBT implementations have been synchronized glass-box systems. We propose a general, black-box PBT framework that distributes many asynchronous "trials" (a small number of training steps with warm-starting) across a cluster, coordinated by the PBT controller. The black-box design does not make assumptions on model architectures, loss functions or training procedures. Our system supports dynamic hyperparameter schedules to optimize both differentiable and non-differentiable metrics. We apply our system to train a state-of-the-art WaveNet generative model for human voice synthesis. We show that our PBT system achieves better accuracy, less sensitivity and faster convergence compared to existing methods, given the same computational resource.
Population Based Training of Neural Networks
Nov 28, 2017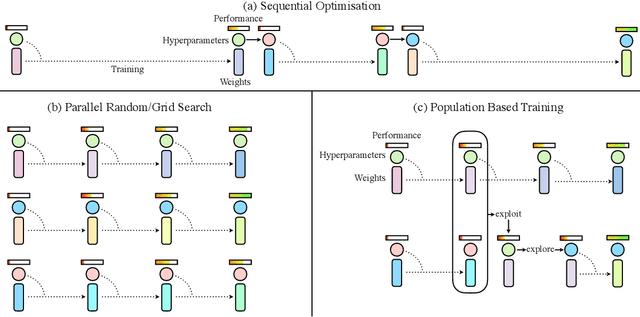

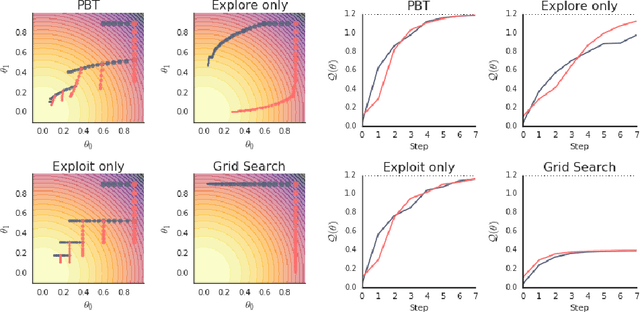
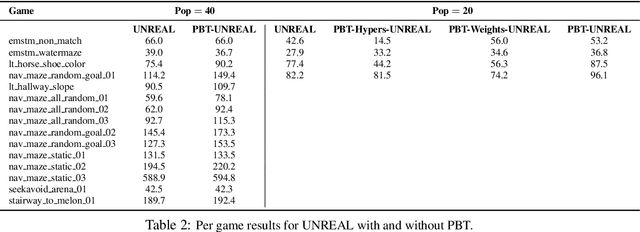
Neural networks dominate the modern machine learning landscape, but their training and success still suffer from sensitivity to empirical choices of hyperparameters such as model architecture, loss function, and optimisation algorithm. In this work we present \emph{Population Based Training (PBT)}, a simple asynchronous optimisation algorithm which effectively utilises a fixed computational budget to jointly optimise a population of models and their hyperparameters to maximise performance. Importantly, PBT discovers a schedule of hyperparameter settings rather than following the generally sub-optimal strategy of trying to find a single fixed set to use for the whole course of training. With just a small modification to a typical distributed hyperparameter training framework, our method allows robust and reliable training of models. We demonstrate the effectiveness of PBT on deep reinforcement learning problems, showing faster wall-clock convergence and higher final performance of agents by optimising over a suite of hyperparameters. In addition, we show the same method can be applied to supervised learning for machine translation, where PBT is used to maximise the BLEU score directly, and also to training of Generative Adversarial Networks to maximise the Inception score of generated images. In all cases PBT results in the automatic discovery of hyperparameter schedules and model selection which results in stable training and better final performance.
Tuning the Scheduling of Distributed Stochastic Gradient Descent with Bayesian Optimization
Dec 01, 2016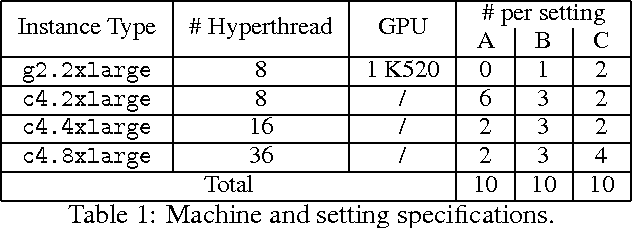
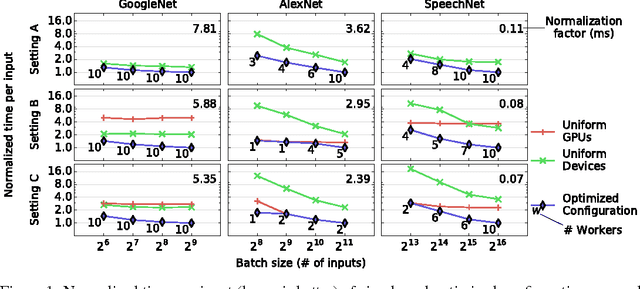


We present an optimizer which uses Bayesian optimization to tune the system parameters of distributed stochastic gradient descent (SGD). Given a specific context, our goal is to quickly find efficient configurations which appropriately balance the load between the available machines to minimize the average SGD iteration time. Our experiments consider setups with over thirty parameters. Traditional Bayesian optimization, which uses a Gaussian process as its model, is not well suited to such high dimensional domains. To reduce convergence time, we exploit the available structure. We design a probabilistic model which simulates the behavior of distributed SGD and use it within Bayesian optimization. Our model can exploit many runtime measurements for inference per evaluation of the objective function. Our experiments show that our resulting optimizer converges to efficient configurations within ten iterations, the optimized configurations outperform those found by generic optimizer in thirty iterations by up to 2X.