 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataRater: Meta-Learned Dataset Curation
May 23, 2025The quality of foundation models depends heavily on their training data. Consequently, great efforts have been put into dataset curation. Yet most approaches rely on manual tuning of coarse-grained mixtures of large buckets of data, or filtering by hand-crafted heuristics. An approach that is ultimately more scalable (let alone more satisfying) is to \emph{learn} which data is actually valuable for training. This type of meta-learning could allow more sophisticated, fine-grained, and effective curation. Our proposed \emph{DataRater} is an instance of this idea. It estimates the value of training on any particular data point. This is done by meta-learning using `meta-gradients', with the objective of improving training efficiency on held out data. In extensive experiments across a range of model scales and datasets, we find that using our DataRater to filter data is highly effective, resulting in significantly improved compute efficiency.
Plasticity as the Mirror of Empowerment
May 15, 2025Agents are minimally entities that are influenced by their past observations and act to influence future observations. This latter capacity is captured by empowerment, which has served as a vital framing concept across artificial intelligence and cognitive science. This former capacity, however, is equally foundational: In what ways, and to what extent, can an agent be influenced by what it observes? In this paper, we ground this concept in a universal agent-centric measure that we refer to as plasticity, and reveal a fundamental connection to empowerment. Following a set of desiderata on a suitable definition, we define plasticity using a new information-theoretic quantity we call the generalized directed information. We show that this new quantity strictly generalizes the directed information introduced by Massey (1990) while preserving all of its desirable properties. Our first finding is that plasticity is the mirror of empowerment: The agent's plasticity is identical to the empowerment of the environment, and vice versa. Our second finding establishes a tension between the plasticity and empowerment of an agent, suggesting that agent design needs to be mindful of both characteristics. We explore the implications of these findings, and suggest that plasticity, empowerment, and their relationship are essential to understanding agency.
Agency Is Frame-Dependent
Feb 06, 2025
Agency is a system's capacity to steer outcomes toward a goal, and is a central topic of study across biology, philosophy, cognitive science, and artificial intelligence. Determining if a system exhibits agency is a notoriously difficult question: Dennett (1989), for instance, highlights the puzzle of determining which principles can decide whether a rock, a thermostat, or a robot each possess agency. We here address this puzzle from the viewpoint of reinforcement learning by arguing that agency is fundamentally frame-dependent: Any measurement of a system's agency must be made relative to a reference frame. We support this claim by presenting a philosophical argument that each of the essential properties of agency proposed by Barandiaran et al. (2009) and Moreno (2018) are themselves frame-dependent. We conclude that any basic science of agency requires frame-dependence, and discuss the implications of this claim for reinforcement learning.
Boundless Socratic Learning with Language Games
Nov 25, 2024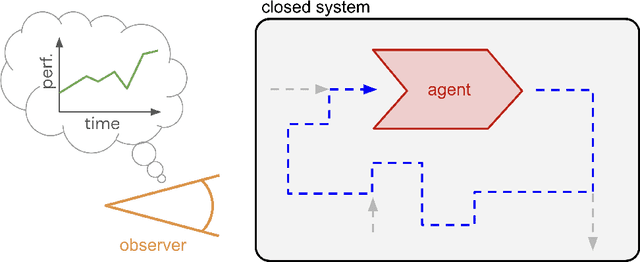
An agent trained within a closed system can master any desired capability, as long as the following three conditions hold: (a) it receives sufficiently informative and aligned feedback, (b) its coverage of experience/data is broad enough, and (c) it has sufficient capacity and resource. In this position paper, we justify these conditions, and consider what limitations arise from (a) and (b) in closed systems, when assuming that (c) is not a bottleneck. Considering the special case of agents with matching input and output spaces (namely, language), we argue that such pure recursive self-improvement, dubbed "Socratic learning", can boost performance vastly beyond what is present in its initial data or knowledge, and is only limited by time, as well as gradual misalignment concerns. Furthermore, we propose a constructive framework to implement it, based on the notion of language games.
Open-Endedness is Essential for Artificial Superhuman Intelligence
Jun 06, 2024


In recent years there has been a tremendous surge in the general capabilities of AI systems, mainly fuelled by training foundation models on internetscale data. Nevertheless, the creation of openended, ever self-improving AI remains elusive. In this position paper, we argue that the ingredients are now in place to achieve openendedness in AI systems with respect to a human observer. Furthermore, we claim that such open-endedness is an essential property of any artificial superhuman intelligence (ASI). We begin by providing a concrete formal definition of open-endedness through the lens of novelty and learnability. We then illustrate a path towards ASI via open-ended systems built on top of foundation models, capable of making novel, humanrelevant discoveries. We conclude by examining the safety implications of generally-capable openended AI. We expect that open-ended foundation models will prove to be an increasingly fertile and safety-critical area of research in the near future.
Vision-Language Models as a Source of Rewards
Dec 14, 2023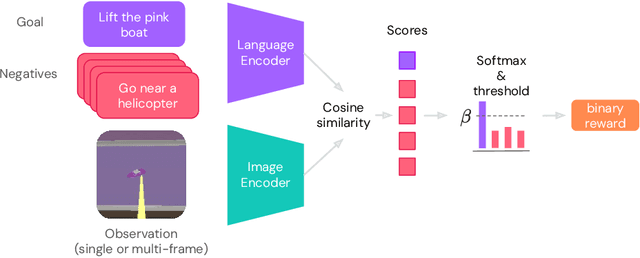
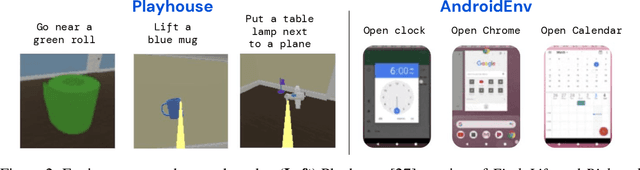
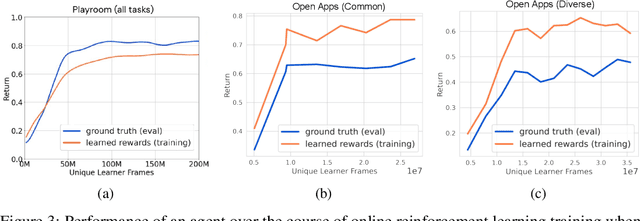
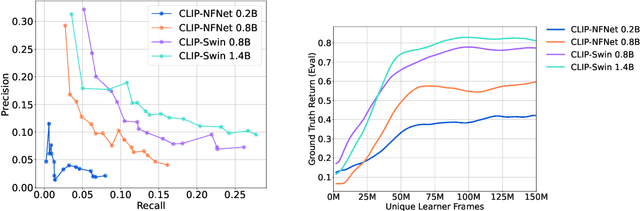
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
Discovering Attention-Based Genetic Algorithms via Meta-Black-Box Optimization
Apr 08, 2023



Genetic algorithms constitute a family of black-box optimization algorithms, which take inspiration from the principles of biological evolution. While they provide a general-purpose tool for optimization, their particular instantiations can be heuristic and motivated by loose biological intuition. In this work we explore a fundamentally different approach: Given a sufficiently flexible parametrization of the genetic operators, we discover entirely new genetic algorithms in a data-driven fashion. More specifically, we parametrize selection and mutation rate adaptation as cross- and self-attention modules and use Meta-Black-Box-Optimization to evolve their parameters on a set of diverse optimization tasks. The resulting Learned Genetic Algorithm outperforms state-of-the-art adaptive baseline genetic algorithms and generalizes far beyond its meta-training settings. The learned algorithm can be applied to previously unseen optimization problems, search dimensions & evaluation budgets. We conduct extensive analysis of the discovered operators and provide ablation experiments, which highlight the benefits of flexible module parametrization and the ability to transfer (`plug-in') the learned operators to conventional genetic algorithms.
Scaling Goal-based Exploration via Pruning Proto-goals
Feb 09, 2023



One of the gnarliest challenges in reinforcement learning (RL) is exploration that scales to vast domains, where novelty-, or coverage-seeking behaviour falls short. Goal-directed, purposeful behaviours are able to overcome this, but rely on a good goal space. The core challenge in goal discovery is finding the right balance between generality (not hand-crafted) and tractability (useful, not too many). Our approach explicitly seeks the middle ground, enabling the human designer to specify a vast but meaningful proto-goal space, and an autonomous discovery process to refine this to a narrower space of controllable, reachable, novel, and relevant goals. The effectiveness of goal-conditioned exploration with the latter is then demonstrated in three challenging environments.
Discovering Evolution Strategies via Meta-Black-Box Optimization
Nov 25, 2022



Optimizing functions without access to gradients is the remit of black-box methods such as evolution strategies. While highly general, their learning dynamics are often times heuristic and inflexible - exactly the limitations that meta-learning can address. Hence, we propose to discover effective update rules for evolution strategies via meta-learning. Concretely, our approach employs a search strategy parametrized by a self-attention-based architecture, which guarantees the update rule is invariant to the ordering of the candidate solutions. We show that meta-evolving this system on a small set of representative low-dimensional analytic optimization problems is sufficient to discover new evolution strategies capable of generalizing to unseen optimization problems, population sizes and optimization horizons. Furthermore, the same learned evolution strategy can outperform established neuroevolution baselines on supervised and continuous control tasks. As additional contributions, we ablate the individual neural network components of our method; reverse engineer the learned strategy into an explicit heuristic form, which remains highly competitive; and show that it is possible to self-referentially train an evolution strategy from scratch, with the learned update rule used to drive the outer meta-learning loop.
The Phenomenon of Policy Churn
Jun 09, 2022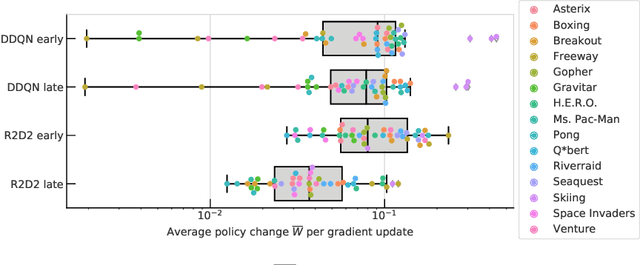
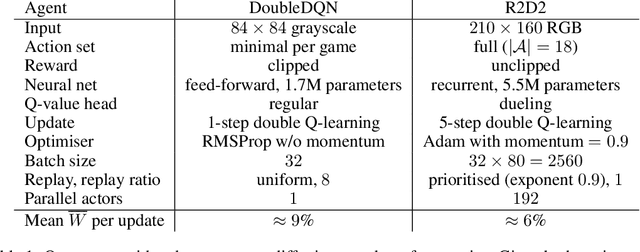
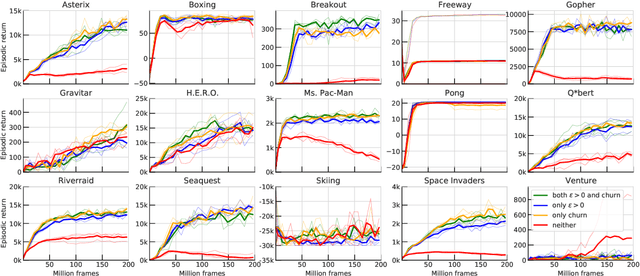
We identify and study the phenomenon of policy churn, that is, the rapid change of the greedy policy in value-based reinforcement learning. Policy churn operates at a surprisingly rapid pace, changing the greedy action in a large fraction of states within a handful of learning updates (in a typical deep RL set-up such as DQN on Atari). We characterise the phenomenon empirically, verifying that it is not limited to specific algorithm or environment properties. A number of ablations help whittle down the plausible explanations on why churn occurs to just a handful, all related to deep learning. Finally, we hypothesise that policy churn is a beneficial but overlooked form of implicit exploration that casts $\epsilon$-greedy exploration in a fresh light, namely that $\epsilon$-noise plays a much smaller role than expected.