 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Prioritized Experience Replay
Jun 10, 2025



Prioritized experience replay, which improves sample efficiency by selecting relevant transitions to update parameter estimates, is a crucial component of contemporary value-based deep reinforcement learning models. Typically, transitions are prioritized based on their temporal difference error. However, this approach is prone to favoring noisy transitions, even when the value estimation closely approximates the target mean. This phenomenon resembles the noisy TV problem postulated in the exploration literature, in which exploration-guided agents get stuck by mistaking noise for novelty. To mitigate the disruptive effects of noise in value estimation, we propose using epistemic uncertainty estimation to guide the prioritization of transitions from the replay buffer. Epistemic uncertainty quantifies the uncertainty that can be reduced by learning, hence reducing transitions sampled from the buffer generated by unpredictable random processes. We first illustrate the benefits of epistemic uncertainty prioritized replay in two tabular toy models: a simple multi-arm bandit task, and a noisy gridworld. Subsequently, we evaluate our prioritization scheme on the Atari suite, outperforming quantile regression deep Q-learning benchmarks; thus forging a path for the use of uncertainty prioritized replay in reinforcement learning agents.
Plasticity as the Mirror of Empowerment
May 15, 2025Agents are minimally entities that are influenced by their past observations and act to influence future observations. This latter capacity is captured by empowerment, which has served as a vital framing concept across artificial intelligence and cognitive science. This former capacity, however, is equally foundational: In what ways, and to what extent, can an agent be influenced by what it observes? In this paper, we ground this concept in a universal agent-centric measure that we refer to as plasticity, and reveal a fundamental connection to empowerment. Following a set of desiderata on a suitable definition, we define plasticity using a new information-theoretic quantity we call the generalized directed information. We show that this new quantity strictly generalizes the directed information introduced by Massey (1990) while preserving all of its desirable properties. Our first finding is that plasticity is the mirror of empowerment: The agent's plasticity is identical to the empowerment of the environment, and vice versa. Our second finding establishes a tension between the plasticity and empowerment of an agent, suggesting that agent design needs to be mindful of both characteristics. We explore the implications of these findings, and suggest that plasticity, empowerment, and their relationship are essential to understanding agency.
Agency Is Frame-Dependent
Feb 06, 2025
Agency is a system's capacity to steer outcomes toward a goal, and is a central topic of study across biology, philosophy, cognitive science, and artificial intelligence. Determining if a system exhibits agency is a notoriously difficult question: Dennett (1989), for instance, highlights the puzzle of determining which principles can decide whether a rock, a thermostat, or a robot each possess agency. We here address this puzzle from the viewpoint of reinforcement learning by arguing that agency is fundamentally frame-dependent: Any measurement of a system's agency must be made relative to a reference frame. We support this claim by presenting a philosophical argument that each of the essential properties of agency proposed by Barandiaran et al. (2009) and Moreno (2018) are themselves frame-dependent. We conclude that any basic science of agency requires frame-dependence, and discuss the implications of this claim for reinforcement learning.
Lifelong Reinforcement Learning via Neuromodulation
Aug 15, 2024

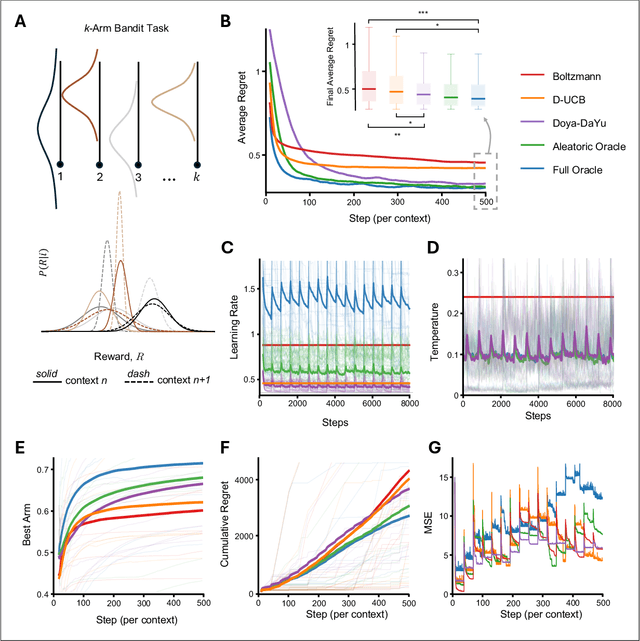

Navigating multiple tasks$\unicode{x2014}$for instance in succession as in continual or lifelong learning, or in distributions as in meta or multi-task learning$\unicode{x2014}$requires some notion of adaptation. Evolution over timescales of millennia has imbued humans and other animals with highly effective adaptive learning and decision-making strategies. Central to these functions are so-called neuromodulatory systems. In this work we introduce an abstract framework for integrating theories and evidence from neuroscience and the cognitive sciences into the design of adaptive artificial reinforcement learning algorithms. We give a concrete instance of this framework built on literature surrounding the neuromodulators Acetylcholine (ACh) and Noradrenaline (NA), and empirically validate the effectiveness of the resulting adaptive algorithm in a non-stationary multi-armed bandit problem. We conclude with a theory-based experiment proposal providing an avenue to link our framework back to efforts in experimental neuroscience.
Normalization and effective learning rates in reinforcement learning
Jul 01, 2024



Normalization layers have recently experienced a renaissance in the deep reinforcement learning and continual learning literature, with several works highlighting diverse benefits such as improving loss landscape conditioning and combatting overestimation bias. However, normalization brings with it a subtle but important side effect: an equivalence between growth in the norm of the network parameters and decay in the effective learning rate. This becomes problematic in continual learning settings, where the resulting effective learning rate schedule may decay to near zero too quickly relative to the timescale of the learning problem. We propose to make the learning rate schedule explicit with a simple re-parameterization which we call Normalize-and-Project (NaP), which couples the insertion of normalization layers with weight projection, ensuring that the effective learning rate remains constant throughout training. This technique reveals itself as a powerful analytical tool to better understand learning rate schedules in deep reinforcement learning, and as a means of improving robustness to nonstationarity in synthetic plasticity loss benchmarks along with both the single-task and sequential variants of the Arcade Learning Environment. We also show that our approach can be easily applied to popular architectures such as ResNets and transformers while recovering and in some cases even slightly improving the performance of the base model in common stationary benchmarks.
A Unifying Framework for Action-Conditional Self-Predictive Reinforcement Learning
Jun 04, 2024



Learning a good representation is a crucial challenge for Reinforcement Learning (RL) agents. Self-predictive learning provides means to jointly learn a latent representation and dynamics model by bootstrapping from future latent representations (BYOL). Recent work has developed theoretical insights into these algorithms by studying a continuous-time ODE model for self-predictive representation learning under the simplifying assumption that the algorithm depends on a fixed policy (BYOL-$\Pi$); this assumption is at odds with practical instantiations of such algorithms, which explicitly condition their predictions on future actions. In this work, we take a step towards bridging the gap between theory and practice by analyzing an action-conditional self-predictive objective (BYOL-AC) using the ODE framework, characterizing its convergence properties and highlighting important distinctions between the limiting solutions of the BYOL-$\Pi$ and BYOL-AC dynamics. We show how the two representations are related by a variance equation. This connection leads to a novel variance-like action-conditional objective (BYOL-VAR) and its corresponding ODE. We unify the study of all three objectives through two complementary lenses; a model-based perspective, where each objective is shown to be equivalent to a low-rank approximation of certain dynamics, and a model-free perspective, which establishes relationships between the objectives and their respective value, Q-value, and advantage function. Our empirical investigations, encompassing both linear function approximation and Deep RL environments, demonstrates that BYOL-AC is better overall in a variety of different settings.
Understanding the performance gap between online and offline alignment algorithms
May 14, 2024



Reinforcement learning from human feedback (RLHF) is the canonical framework for large language model alignment. However, rising popularity in offline alignment algorithms challenge the need for on-policy sampling in RLHF. Within the context of reward over-optimization, we start with an opening set of experiments that demonstrate the clear advantage of online methods over offline methods. This prompts us to investigate the causes to the performance discrepancy through a series of carefully designed experimental ablations. We show empirically that hypotheses such as offline data coverage and data quality by itself cannot convincingly explain the performance difference. We also find that while offline algorithms train policy to become good at pairwise classification, it is worse at generations; in the meantime the policies trained by online algorithms are good at generations while worse at pairwise classification. This hints at a unique interplay between discriminative and generative capabilities, which is greatly impacted by the sampling process. Lastly, we observe that the performance discrepancy persists for both contrastive and non-contrastive loss functions, and appears not to be addressed by simply scaling up policy networks. Taken together, our study sheds light on the pivotal role of on-policy sampling in AI alignment, and hints at certain fundamental challenges of offline alignment algorithms.
Disentangling the Causes of Plasticity Loss in Neural Networks
Feb 29, 2024Underpinning the past decades of work on the design, initialization, and optimization of neural networks is a seemingly innocuous assumption: that the network is trained on a \textit{stationary} data distribution. In settings where this assumption is violated, e.g.\ deep reinforcement learning, learning algorithms become unstable and brittle with respect to hyperparameters and even random seeds. One factor driving this instability is the loss of plasticity, meaning that updating the network's predictions in response to new information becomes more difficult as training progresses. While many recent works provide analyses and partial solutions to this phenomenon, a fundamental question remains unanswered: to what extent do known mechanisms of plasticity loss overlap, and how can mitigation strategies be combined to best maintain the trainability of a network? This paper addresses these questions, showing that loss of plasticity can be decomposed into multiple independent mechanisms and that, while intervening on any single mechanism is insufficient to avoid the loss of plasticity in all cases, intervening on multiple mechanisms in conjunction results in highly robust learning algorithms. We show that a combination of layer normalization and weight decay is highly effective at maintaining plasticity in a variety of synthetic nonstationary learning tasks, and further demonstrate its effectiveness on naturally arising nonstationarities, including reinforcement learning in the Arcade Learning Environment.
A Distributional Analogue to the Successor Representation
Feb 13, 2024



This paper contributes a new approach for distributional reinforcement learning which elucidates a clean separation of transition structure and reward in the learning process. Analogous to how the successor representation (SR) describes the expected consequences of behaving according to a given policy, our distributional successor measure (SM) describes the distributional consequences of this behaviour. We formulate the distributional SM as a distribution over distributions and provide theory connecting it with distributional and model-based reinforcement learning. Moreover, we propose an algorithm that learns the distributional SM from data by minimizing a two-level maximum mean discrepancy. Key to our method are a number of algorithmic techniques that are independently valuable for learning generative models of state. As an illustration of the usefulness of the distributional SM, we show that it enables zero-shot risk-sensitive policy evaluation in a way that was not previously possible.
Near-Minimax-Optimal Distributional Reinforcement Learning with a Generative Model
Feb 12, 2024



We propose a new algorithm for model-based distributional reinforcement learning (RL), and prove that it is minimax-optimal for approximating return distributions with a generative model (up to logarithmic factors), resolving an open question of Zhang et al. (2023). Our analysis provides new theoretical results on categorical approaches to distributional RL, and also introduces a new distributional Bellman equation, the stochastic categorical CDF Bellman equation, which we expect to be of independent interest. We also provide an experimental study comparing several model-based distributional RL algorithms, with several takeaways for practitioners.