 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unifying Framework for Action-Conditional Self-Predictive Reinforcement Learning
Jun 04, 2024



Learning a good representation is a crucial challenge for Reinforcement Learning (RL) agents. Self-predictive learning provides means to jointly learn a latent representation and dynamics model by bootstrapping from future latent representations (BYOL). Recent work has developed theoretical insights into these algorithms by studying a continuous-time ODE model for self-predictive representation learning under the simplifying assumption that the algorithm depends on a fixed policy (BYOL-$\Pi$); this assumption is at odds with practical instantiations of such algorithms, which explicitly condition their predictions on future actions. In this work, we take a step towards bridging the gap between theory and practice by analyzing an action-conditional self-predictive objective (BYOL-AC) using the ODE framework, characterizing its convergence properties and highlighting important distinctions between the limiting solutions of the BYOL-$\Pi$ and BYOL-AC dynamics. We show how the two representations are related by a variance equation. This connection leads to a novel variance-like action-conditional objective (BYOL-VAR) and its corresponding ODE. We unify the study of all three objectives through two complementary lenses; a model-based perspective, where each objective is shown to be equivalent to a low-rank approximation of certain dynamics, and a model-free perspective, which establishes relationships between the objectives and their respective value, Q-value, and advantage function. Our empirical investigations, encompassing both linear function approximation and Deep RL environments, demonstrates that BYOL-AC is better overall in a variety of different settings.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Optimism and Adaptivity in Policy Optimization
Jun 18, 2023We work towards a unifying paradigm for accelerating policy optimization methods in reinforcement learning (RL) through \emph{optimism} \& \emph{adaptivity}. Leveraging the deep connection between policy iteration and policy gradient methods, we recast seemingly unrelated policy optimization algorithms as the repeated application of two interleaving steps (i) an \emph{optimistic policy improvement operator} maps a prior policy $\pi_t$ to a hypothesis $\pi_{t+1}$ using a \emph{gradient ascent prediction}, followed by (ii) a \emph{hindsight adaptation} of the optimistic prediction based on a partial evaluation of the performance of $\pi_{t+1}$. We use this shared lens to jointly express other well-known algorithms, including soft and optimistic policy iteration, natural actor-critic methods, model-based policy improvement based on forward search, and meta-learning algorithms. By doing so, we shed light on collective theoretical properties related to acceleration via optimism \& adaptivity. Building on these insights, we design an \emph{adaptive \& optimistic policy gradient} algorithm via meta-gradient learning, and empirically highlight several design choices pertaining to optimism, in an illustrative task.
Large-Scale Retrieval for Reinforcement Learning
Jun 10, 2022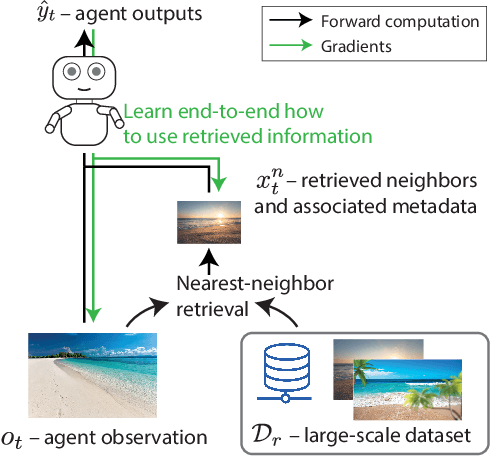
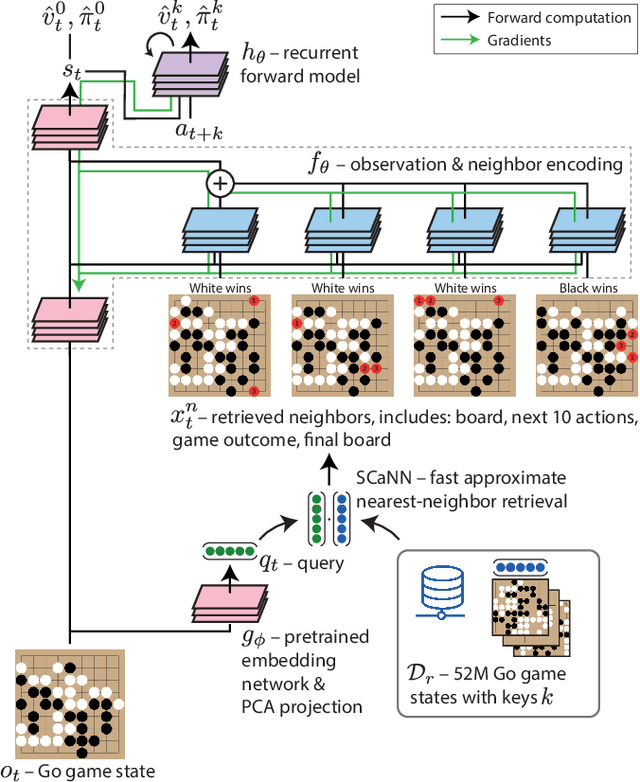
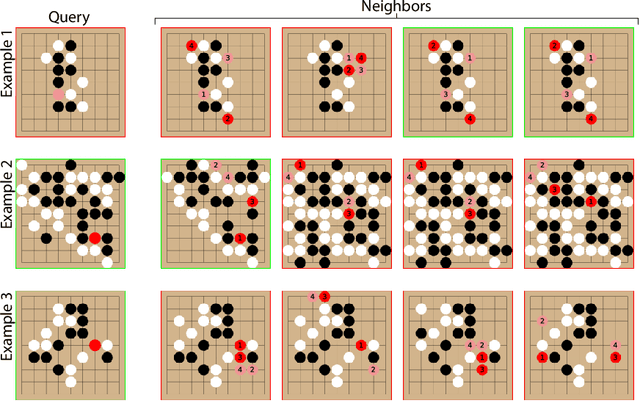
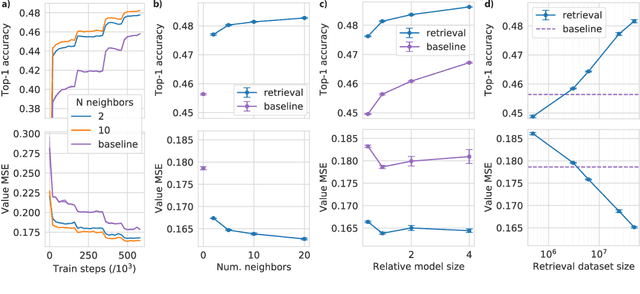
Effective decision making involves flexibly relating past experiences and relevant contextual information to a novel situation. In deep reinforcement learning, the dominant paradigm is for an agent to amortise information that helps decision-making into its network weights via gradient descent on training losses. Here, we pursue an alternative approach in which agents can utilise large-scale context-sensitive database lookups to support their parametric computations. This allows agents to directly learn in an end-to-end manner to utilise relevant information to inform their outputs. In addition, new information can be attended to by the agent, without retraining, by simply augmenting the retrieval dataset. We study this approach in Go, a challenging game for which the vast combinatorial state space privileges generalisation over direct matching to past experiences. We leverage fast, approximate nearest neighbor techniques in order to retrieve relevant data from a set of tens of millions of expert demonstration states. Attending to this information provides a significant boost to prediction accuracy and game-play performance over simply using these demonstrations as training trajectories, providing a compelling demonstration of the value of large-scale retrieval in reinforcement learning agents.
COptiDICE: Offline Constrained Reinforcement Learning via Stationary Distribution Correction Estimation
Apr 19, 2022
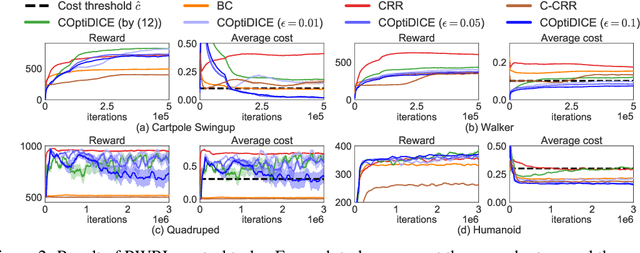


We consider the offline constrained reinforcement learning (RL) problem, in which the agent aims to compute a policy that maximizes expected return while satisfying given cost constraints, learning only from a pre-collected dataset. This problem setting is appealing in many real-world scenarios, where direct interaction with the environment is costly or risky, and where the resulting policy should comply with safety constraints. However, it is challenging to compute a policy that guarantees satisfying the cost constraints in the offline RL setting, since the off-policy evaluation inherently has an estimation error. In this paper, we present an offline constrained RL algorithm that optimizes the policy in the space of the stationary distribution. Our algorithm, COptiDICE, directly estimates the stationary distribution corrections of the optimal policy with respect to returns, while constraining the cost upper bound, with the goal of yielding a cost-conservative policy for actual constraint satisfaction. Experimental results show that COptiDICE attains better policies in terms of constraint satisfaction and return-maximization, outperforming baseline algorithms.
Retrieval-Augmented Reinforcement Learning
Mar 09, 2022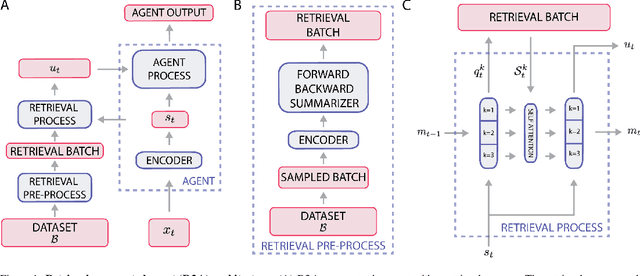
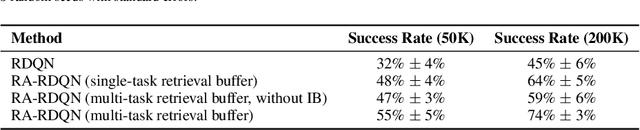
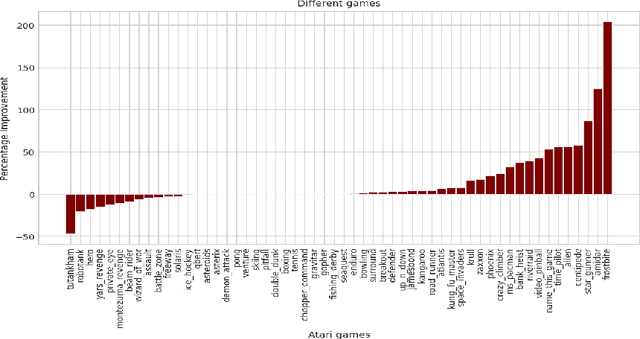
Most deep reinforcement learning (RL) algorithms distill experience into parametric behavior policies or value functions via gradient updates. While effective, this approach has several disadvantages: (1) it is computationally expensive, (2) it can take many updates to integrate experiences into the parametric model, (3) experiences that are not fully integrated do not appropriately influence the agent's behavior, and (4) behavior is limited by the capacity of the model. In this paper we explore an alternative paradigm in which we train a network to map a dataset of past experiences to optimal behavior. Specifically, we augment an RL agent with a retrieval process (parameterized as a neural network) that has direct access to a dataset of experiences. This dataset can come from the agent's past experiences, expert demonstrations, or any other relevant source. The retrieval process is trained to retrieve information from the dataset that may be useful in the current context, to help the agent achieve its goal faster and more efficiently. We integrate our method into two different RL agents: an offline DQN agent and an online R2D2 agent. In offline multi-task problems, we show that the retrieval-augmented DQN agent avoids task interference and learns faster than the baseline DQN agent. On Atari, we show that retrieval-augmented R2D2 learns significantly faster than the baseline R2D2 agent and achieves higher scores. We run extensive ablations to measure the contributions of the components of our proposed method.
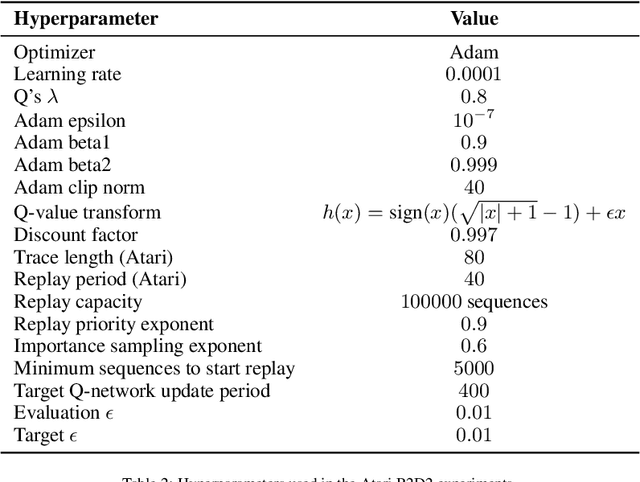
Muesli: Combining Improvements in Policy Optimization
Apr 13, 2021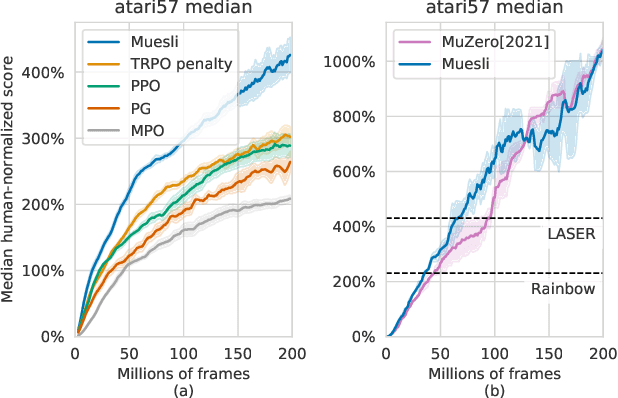

We propose a novel policy update that combines regularized policy optimization with model learning as an auxiliary loss. The update (henceforth Muesli) matches MuZero's state-of-the-art performance on Atari. Notably, Muesli does so without using deep search: it acts directly with a policy network and has computation speed comparable to model-free baselines. The Atari results are complemented by extensive ablations, and by additional results on continuous control and 9x9 Go.
Counterfactual Credit Assignment in Model-Free Reinforcement Learning
Nov 18, 2020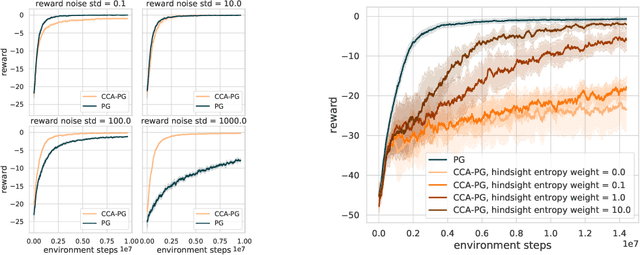
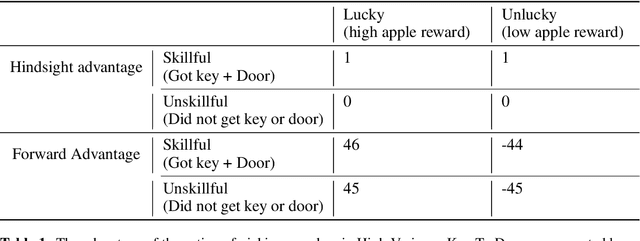
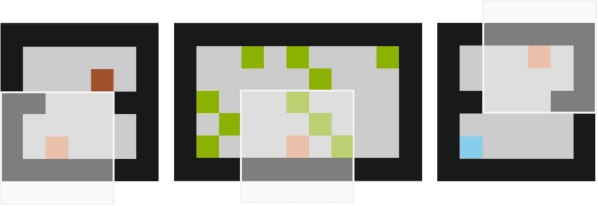
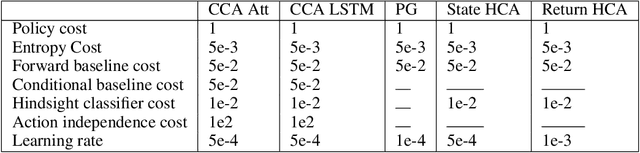
Credit assignment in reinforcement learning is the problem of measuring an action influence on future rewards. In particular, this requires separating skill from luck, ie. disentangling the effect of an action on rewards from that of external factors and subsequent actions. To achieve this, we adapt the notion of counterfactuals from causality theory to a model-free RL setup. The key idea is to condition value functions on future events, by learning to extract relevant information from a trajectory. We then propose to use these as future-conditional baselines and critics in policy gradient algorithms and we develop a valid, practical variant with provably lower variance, while achieving unbiasedness by constraining the hindsight information not to contain information about the agent actions. We demonstrate the efficacy and validity of our algorithm on a number of illustrative problems.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020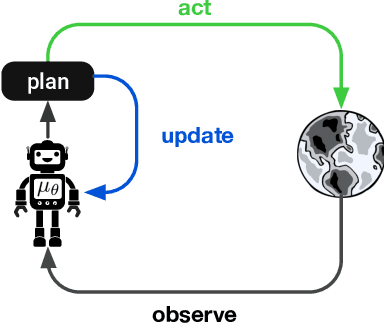
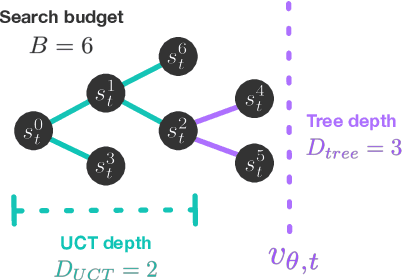
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.